TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062437
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171521
出願日
2023-10-02
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
63/10 20060101AFI20250407BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場の表面を直接センシングするセンサを用いずに、圃場状態に合わせて圃場の表面に沿うように植付を行うことができる作業車両を提供すること。
【解決手段】実施形態の一態様に係る作業車両は、圃場を走行する走行車体と、走行車体の後部に積載された苗マットから取り出した苗を圃場に植え付ける苗植付部と、苗植付部を昇降可能に支持する昇降リンク機構と、走行車体のピッチング角度を検出するピッチング角度センサと、昇降リンク機構を介して苗植付部を昇降させる制御装置と、を備える。制御装置は、ピッチング角度の変化に応じて苗植付部を昇降させる。
【選択図】図7
特許請求の範囲
【請求項1】
圃場を走行する走行車体と、
前記走行車体の後部に積載された苗マットから取り出した苗を前記圃場に植え付ける苗植付部と、
前記苗植付部を昇降可能に支持する昇降リンク機構と、
前記走行車体のピッチング角度を検出するピッチング角度センサと、
前記昇降リンク機構を介して前記苗植付部を昇降させる制御装置と、を備え、
前記制御装置は、前記ピッチング角度の変化に応じて前記苗植付部を昇降させる作業車両。
続きを表示(約 2,000 文字)
【請求項2】
前記制御装置は、前記圃場の表面に対して一定の高さになるように前記苗植付部を昇降させる請求項1に記載の作業車両。
【請求項3】
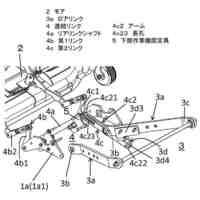
前記昇降リンク機構の傾斜角度であるリンク角度を検出するリンク角度センサと、
前記苗植付部の下部に設けられ前記圃場の表面を均すとともに、前記圃場の表面の凹凸により回動するフロートと、
前記フロートの回動角度であるフロート角度を検出するフロート角度センサと、を備え、
前記制御装置は、
前記リンク角度に基づいて前記走行車体の車輪接地面に対する圃場深さを算出し、前記圃場深さに応じた植付深さの目標値を設定し、
前記フロート角度の基準値よりも前記フロートが垂れ下がった場合、前記植付深さの目標値を小さくし、前記基準値よりも前記フロートが持ち上がった場合、前記植付深さの目標値を大きくする請求項1または請求項2に記載の作業車両。
【請求項4】
前記苗植付部の下部に設けられ前記圃場の表面を均すとともに、前記圃場の表面の凹凸により回動するフロートと、
前記フロートの回動角度であるフロート角度を検出するフロート角度センサと、
前記走行車体の移動距離を検出する移動距離センサと、を備え、
前記制御装置は、
前記ピッチング角度の推移と前記走行車体の移動距離に基づいて、前記走行車体の車輪接地面と前記フロートのフロート接地面とのなす角度である折れ曲がり角度を算出し、
前記走行車体の車輪接地面が上り坂となる場合をプラスの角度、前記走行車体の車輪接地面が下り坂となる場合をマイナスの角度としたとき、前記折れ曲がり角度が増加するに応じて植付深さの目標値を大きくする請求項1または請求項2に記載の作業車両。
【請求項5】
前記走行車体の移動距離を検出する移動距離センサを備え、
前記制御装置は、
前記ピッチング角度の推移と前記走行車体の移動距離に基づいて、前記走行車体の車輪接地面とフロート接地面とのなす角度である折れ曲がり角度を算出し、
前記折れ曲がり角度の絶対値の増加に応じて前記フロート角度の不感帯を大きくし、前記フロート角度に応じた前記苗植付部の昇降を抑制する請求項3に記載の作業車両。
【請求項6】
前記走行車体の移動距離を検出する移動距離センサを備え、
前記制御装置は、
前記ピッチング角度の推移と前記走行車体の移動距離に基づいて、前記走行車体の車輪接地面とフロート接地面とのなす角度である折れ曲がり角度を算出し、
前記折れ曲がり角度の絶対値が一定以上の場合、前記フロート角度に応じた前記苗植付部の昇降を行わない請求項3に記載の作業車両。
【請求項7】
前記制御装置は、
前記走行車体の前輪から前記苗植付部までの前後方向の距離を2以上の自然数nで除した値を一定距離として設定し、
前記走行車体が前記一定距離だけ移動する毎に前記ピッチング角度を記録し、
最新のn個のピッチング角度と、成分の総和が0であるn行1列のデータと、の積を前記折れ曲がり角度として算出する請求項4に記載の作業車両。
【請求項8】
前記走行車体の走行速度を変速する副変速機構と、
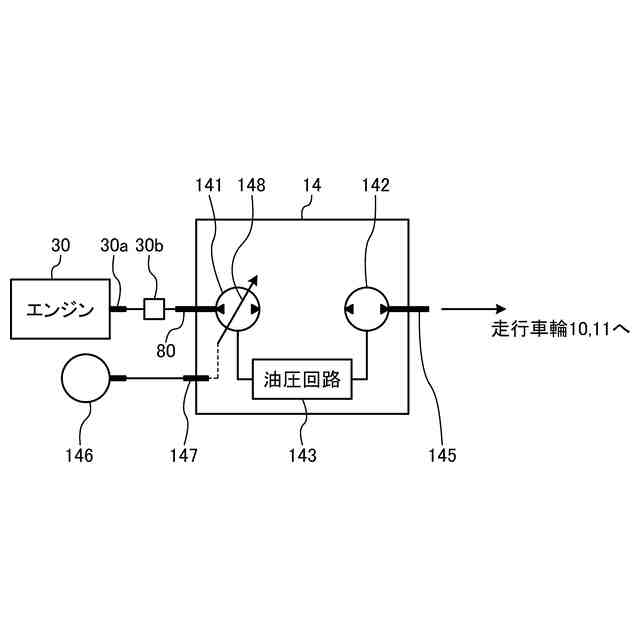
前記走行車体のエンジンから入力される動力を変速して出力する油圧式無段変速装置と、を備え、
前記制御装置は、前記油圧式無段変速装置のトラニオン開度の上限が制限されたモードである微速前進モードを有し、
前記副変速機構が非伝動の中立状態である場合に、前記微速前進モードを無効とする請求項1または請求項2に記載の作業車両。
【請求項9】
前記苗植付部は、電動式植込杆を備え、
前記電動式植込杆は、回転して苗を植え付ける植付爪と、前記植付爪を駆動するモータと、前記植付爪の回転角度を検出する回転角度センサと、を有し、
前記制御装置は、前記走行車体の自動走行における方位を教示する方位ティーチング時に、前記回転角度センサの校正のため、前記モータにより前記植付爪を逆回転させたときのトルク値から位相を決定する請求項1または請求項2に記載の作業車両。
【請求項10】
前記苗マットが載置され、左右方向に往復動する苗タンクを備え、
前記苗タンクには、苗の消費に応じて下方向に発光位置が移動する発光装置が設けられ、
前記苗タンクの往復回数、前記苗植付部の苗取量および苗の圧縮率に基づいて苗消費量が算出され、前記発光装置の発光位置は、前記苗消費量の目安となる請求項1または請求項2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、フロートで圃場の表面を均すとともに、圃場の表面の凹凸を検出して苗植付部を昇降させて、苗の植付深さを一定にする作業車両が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-106566号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の従来技術において、圃場の表面の凹凸によりフロートが回動する。従来技術は、フロートの回動角度であるフロート角度に基づいて苗の植付深さを制御するが、圃場の表面の凹凸で走行車体が暴れたときや、スロープ状の畦を上りながら植え付ける際に、苗植付部が圃場の表面に対して上下に移動するため苗の植付深さを一定にできない。圃場の表面を直接センシングするセンサを苗植付部に設ける場合、追加コストや設計変更が必要となる。そこで、圃場の表面を直接センシングするセンサを用いずに、圃場状態に合わせて、圃場の表面に沿うように植付を行うことができる作業車両が求められていた。
【0005】
本発明は、上記に鑑みてなされたものであって、圃場の表面を直接センシングするセンサを用いずに、圃場状態に合わせて圃場の表面に沿うように植付を行うことができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両(1)は、圃場を走行する走行車体(2)と、走行車体(2)の後部に積載された苗マットから取り出した苗を圃場に植え付ける苗植付部(4)と、苗植付部(4)を昇降可能に支持する昇降リンク機構(3)と、走行車体(2)のピッチング角度を検出するピッチング角度センサ(150)と、昇降リンク機構(3)を介して苗植付部を昇降させる制御装置(100)と、を備え、制御装置(100)は、ピッチング角度の変化に応じて苗植付部(4)を昇降させる。
【発明の効果】
【0007】
実施形態の一態様によれば、作業車両は、圃場の表面を直接センシングするセンサを用いずに、圃場状態に合わせて圃場の表面に沿うように植付を行うことができる。
【図面の簡単な説明】
【0008】
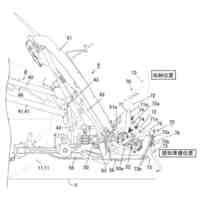
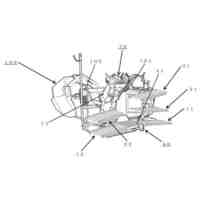
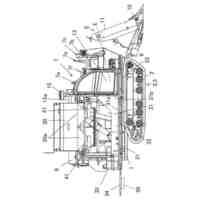
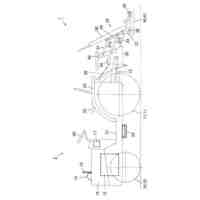
図1は、作業車両を示す側面図である。
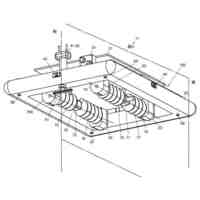
図2は、作業車両を示す平面図である。
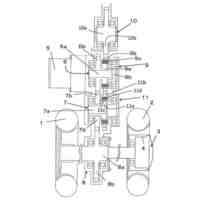
図3は、HSTの説明図である。
図4は、レバー案内部を説明する図である。
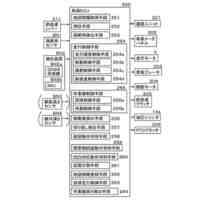
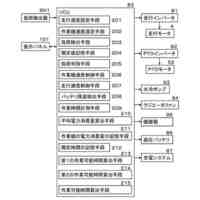
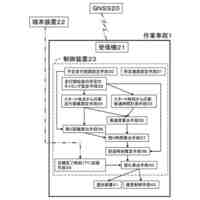
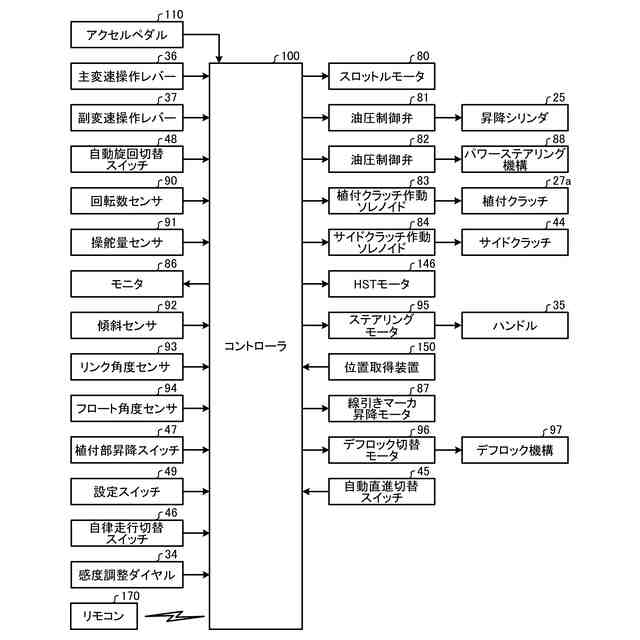
図5は、苗移植機の制御装置を中心とした制御系を示すブロック図である。
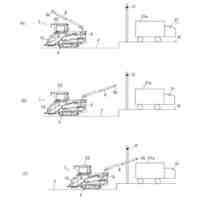
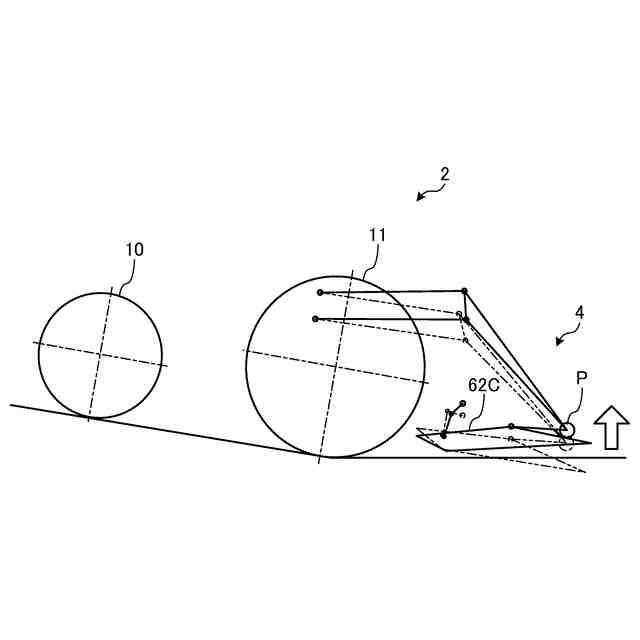
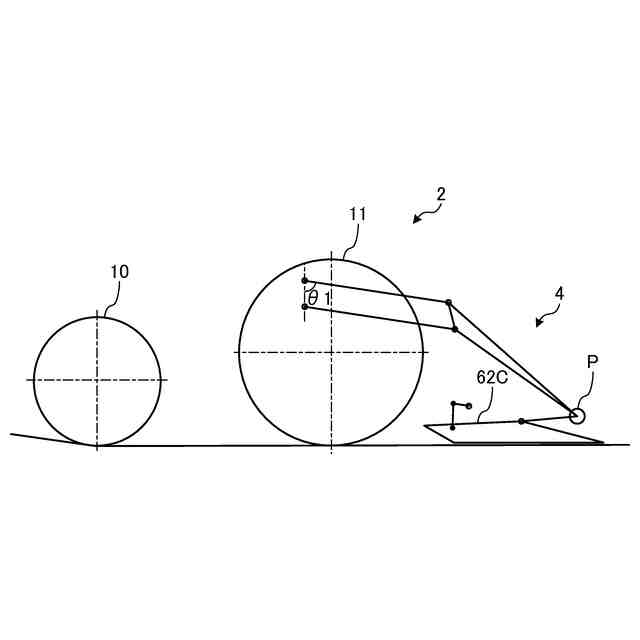
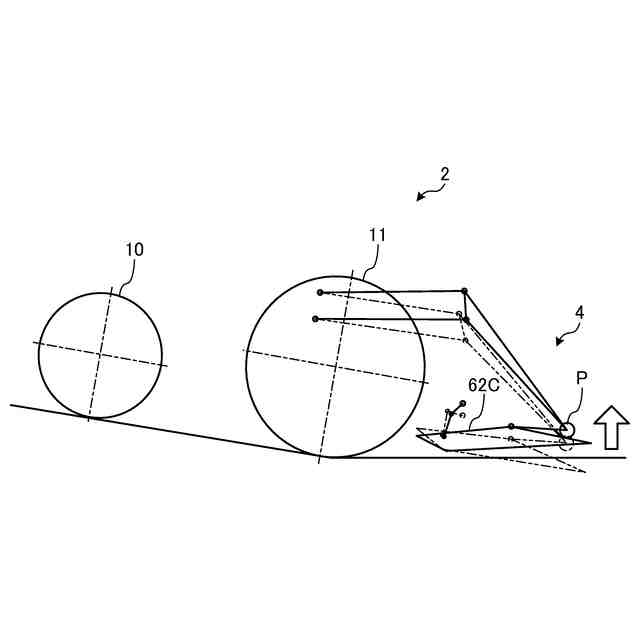
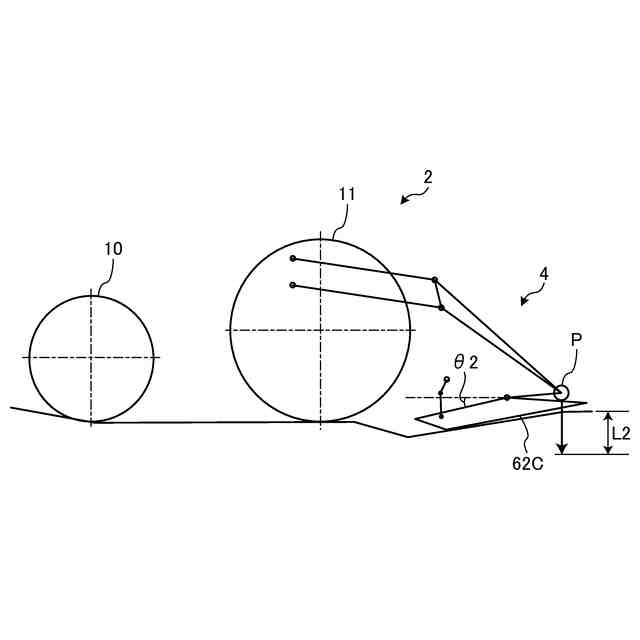
図6は、ピッチング角度の変化に応じた苗植付部の昇降を説明する図である。
図7は、ピッチング角度の変化に応じた苗植付部の昇降を説明する図である。
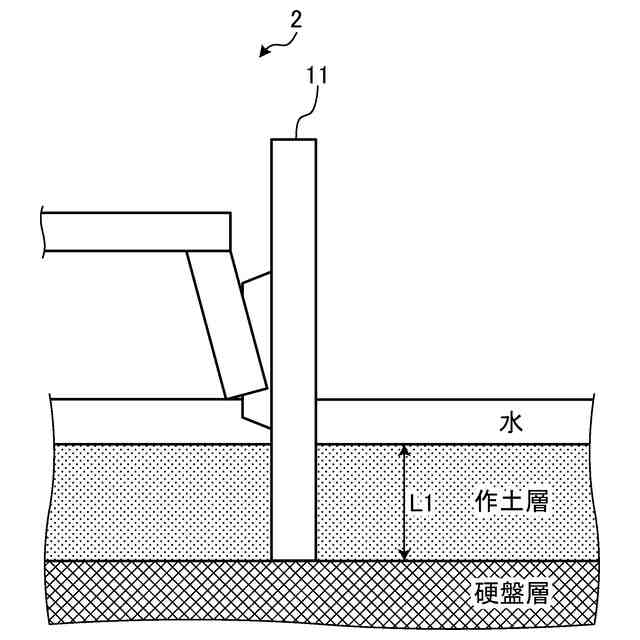
図8は、圃場深さを説明する図である。
図9は、フロートが垂れ下がった場合の植付深さの目標値を説明する図である。
図10は、フロートが持ち上がった場合の植付深さの目標値を説明する図である。
図11は、折れ曲がり角度の増加に応じた植付深さの目標値の変更処理を説明する図である。
図12は、走行車体の前輪から苗植付部までの前後方向の距離を説明する図である。
図13は、電動式植込杆を説明する図である。
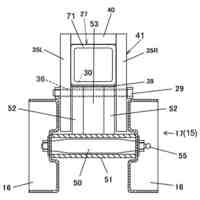
図14は、モータ制御MDUおよびメインECUの配置を説明する図である。
図15は、モータ制御MDUおよびメインECUの配置を説明する図である。
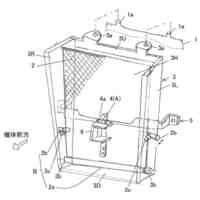
図16は、発光装置の配置を説明する図である。
図17は、発光装置の発光位置を説明する図である。
図18は、発光装置の発光位置を説明する図である。
【発明を実施するための形態】
【0009】
まず、図1および図2を参照して実施形態に係る作業車両1の概要について説明する。図1は、作業車両1を示す側面図である。図2は、作業車両1を示す平面図である。
【0010】
なお、以下の説明では、前後方向とは、作業車両1の直進時における進行方向であり、進行方向の前方側を「前」、後方側を「後」と規定する。作業車両1の進行方向とは、直進時において、操縦席41からハンドル35(ステアリング装置)に向かう方向である(図1および図2参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
苗移植機
7日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
苗移植機
13日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
精米設備
17日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
収穫作業機
13日前
井関農機株式会社
コンバイン
24日前
井関農機株式会社
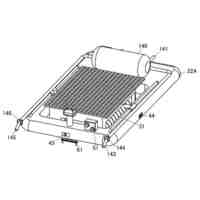
ラジエータ
28日前
井関農機株式会社
コンバイン
1日前
井関農機株式会社
EGR装置
3日前
井関農機株式会社
収穫作業機
3日前
井関農機株式会社
圃場管理装置
今日
井関農機株式会社
電動作業車両
22日前
井関農機株式会社
苗移植作業機
今日
井関農機株式会社
圃場管理装置
8日前
井関農機株式会社
圃場管理装置
8日前
井関農機株式会社
籾摺精米設備
9日前
井関農機株式会社
籾摺精米設備
8日前
井関農機株式会社
圃場管理装置
8日前
井関農機株式会社
汎用コンバイン
今日
井関農機株式会社
汎用コンバイン
今日
井関農機株式会社
農業支援システム
8日前
井関農機株式会社
作業車両システム
22日前
井関農機株式会社
水田管理システム
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ