TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025091669
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207063
出願日
2023-12-07
発明の名称
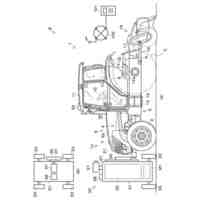
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
B60W
60/00 20200101AFI20250612BHJP(車両一般)
要約
【課題】作業車両の走行により発生する圃場の状態を次回以降の作業に利用可能にすること。
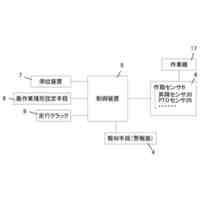
【解決手段】車両本体(1a)の走行時における制動装置(203)の作動に関する情報と、操舵角検出部材(SN1)により検出された操舵の情報と、切替部材(211)の操作の情報とを、圃場の地図情報の車両本体(1a)の位置に対応させて登録することで、作業車両(1)の走行により発生する圃場の状態を次回以降の作業に利用可能にすることができる。
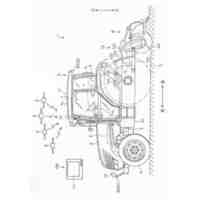
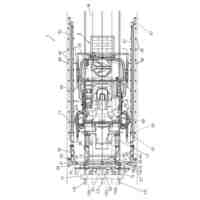
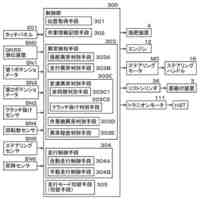
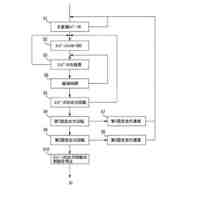
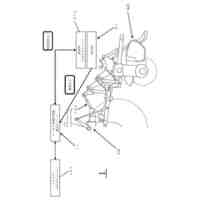
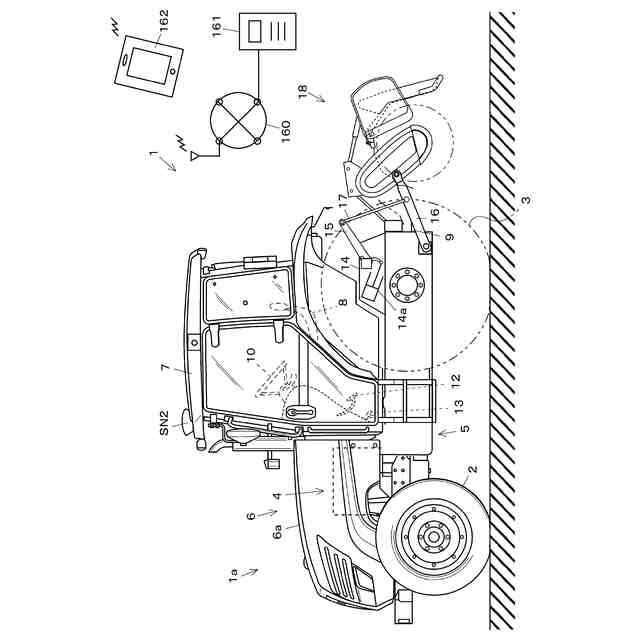
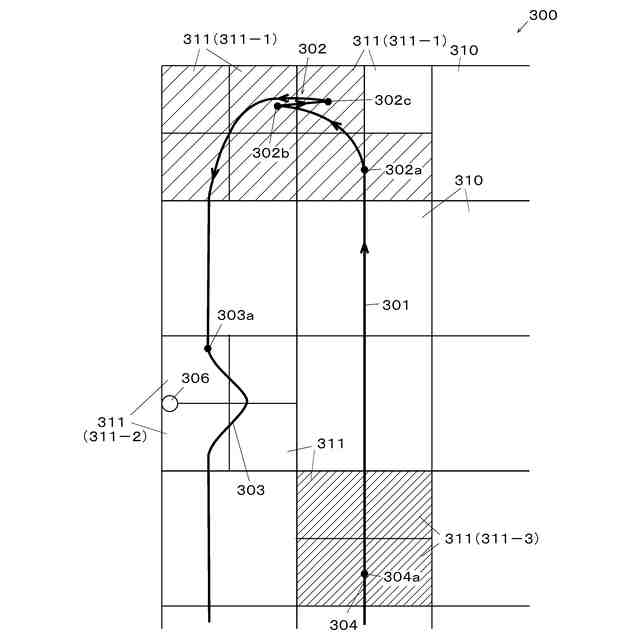
【選択図】図3
特許請求の範囲
【請求項1】
車両本体(1a)と、
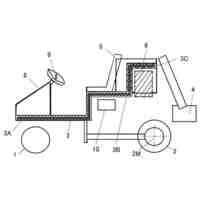
前記車両本体(1a)に支持されて、圃場に対する作業を行う作業機(18)と、
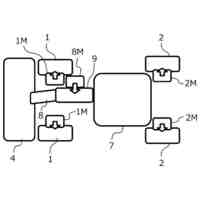
前記車両本体(1a)に支持されて、前記車両本体(1a)を走行させる走行装置(2,3)と、
前記車両本体(1a)を制動する制動装置(203)と、
前記車両本体(1a)の操舵角を検出する操舵角検出部材(SN1)と、
前記車両本体(1a)の前進と後進とを切り替える切替部材(211)と、
前記車両本体(1a)の位置を計測する測位装置(SN2)と、
を備え、
前記車両本体(1a)の走行時における前記制動装置(203)の作動に関する情報と、前記操舵角検出部材(SN1)により検出された操舵の情報と、前記切替部材(211)の操作の情報とを、前記圃場の地図情報の前記車両本体(1a)の位置に対応させて登録する
ことを特徴とする作業車両。
続きを表示(約 670 文字)
【請求項2】
前記制動装置(203)が作動し且つ前記操舵が検出され且つ前記切替部材(211)で前後進の切替が行われた場合を旋回動作として前記地図情報に動作情報を登録し、
前記操舵のみの場合は障害物回避動作として前記地図情報に動作情報を登録し、
前記制動装置(203)の作動のみの場合は圃場の凹凸対応動作として前記地図情報に動作情報を登録し、
前記地図情報において予め定められた大きさの区画の中で、前記車両本体(1a)の位置に対応する区画に、前記動作情報を登録する
ことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記旋回動作が行われた区画を畦際と判断し、
前記旋回動作の操舵開始位置、操舵角、制動圧力、制動位置、前後進の切替位置、走行速度を、前記旋回動作の動作情報として前記地図情報に登録し、
前記車両本体(1a)を自律走行させる入力がされた場合に、前記旋回動作の情報に基づいて前記車両本体(1a)を旋回させる
ことを特徴とする請求項2に記載の作業車両。
【請求項4】
前記作業機(18)の種類情報と前記作業機(18)の作業時の高さとを前記地図情報に登録し、
異なる作業機(18)が装着された場合に、前記地図情報に登録された前記作業機(18)の種類情報と作業時の高さに基づいて、装着された作業機(18)の作業時の高さを導出して、装着された作業機(18)の制御を行う、
ことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、作業車両に関し、特に、地図情報を利用して圃場で作業を行う作業車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
ダンプトラックにおいて、GPSセンサや操舵角センサを備え、地図情報と走行経路情報から、走行モータやブレーキ、操舵モータを制御して、地図情報や走行経路情報に応じて自律走行を行う技術が知られている(特許文献1)。特許文献1では、鉱山の積込場の境界情報から、積込場の積込点に後退で進入するように切り返しを行うような走行経路を算出している。
【先行技術文献】
【特許文献】
【0003】
特開2019-14484号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術は、鉱山から鉱石を搬出するダンプトラックに関する技術であり、特定の位置(積込点)に対して、車両を特定の向きで進入させるために切り返しの走行経路を生成する技術である。したがって、ダンプトラックの切り返しが路面等に影響を与えることは殆どないため、切り返し等の走行に関し、他の車両の作業工程に利用することはない。特に、切り返し時の操舵角の大きさやブレーキの強弱について考慮することは行われていない。
【0005】
本発明は、作業車両の走行により発生する圃場の状態を次回以降の作業に利用可能にすることを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
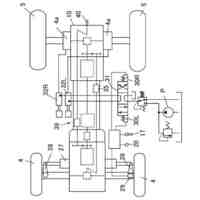
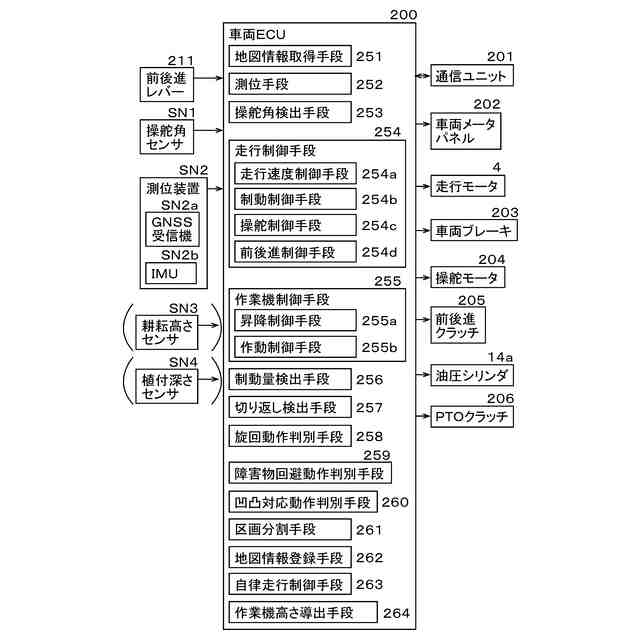
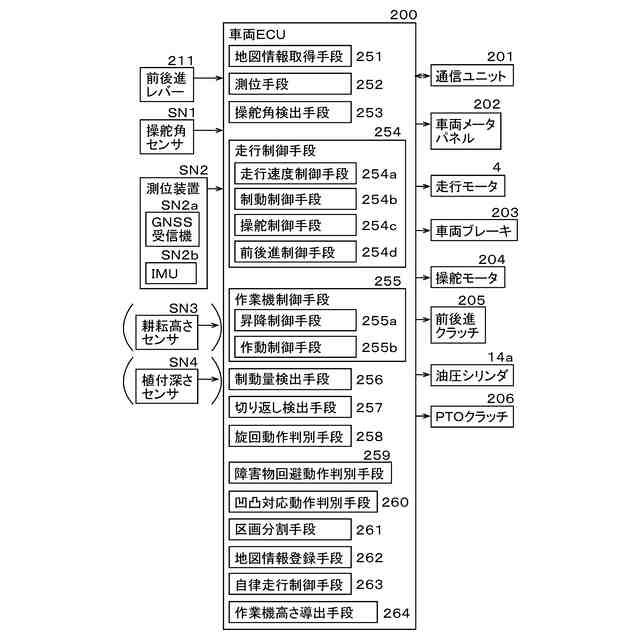
請求項1に記載の発明は、車両本体(1a)と、前記車両本体(1a)に支持されて、圃場に対する作業を行う作業機(18)と、前記車両本体(1a)に支持されて、前記車両本体(1a)を走行させる走行装置(2,3)と、前記車両本体(1a)を制動する制動装置(203)と、前記車両本体(1a)の操舵角を検出する操舵角検出部材(SN1)と、前記車両本体(1a)の前進と後進とを切り替える切替部材(211)と、前記車両本体(1a)の位置を計測する測位装置(SN2)と、を備え、前記車両本体(1a)の走行時における前記制動装置(203)の作動に関する情報と、前記操舵角検出部材(SN1)により検出された操舵の情報と、前記切替部材(211)の操作の情報とを、前記圃場の地図情報の前記車両本体(1a)の位置に対応させて登録することを特徴とする作業車両である。
【0007】
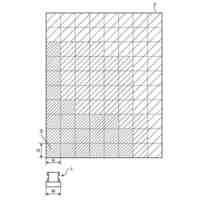
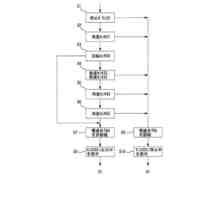
請求項2に記載の発明は、前記制動装置(203)が作動し且つ前記操舵が検出され且つ前記切替部材(211)で前後進の切替が行われた場合を旋回動作として前記地図情報に動作情報を登録し、前記操舵のみの場合は障害物回避動作として前記地図情報に動作情報を登録し、前記制動装置(203)の作動のみの場合は圃場の凹凸対応動作として前記地図情報に動作情報を登録し、前記地図情報において予め定められた大きさの区画の中で、前記車両本体(1a)の位置に対応する区画に、前記動作情報を登録することを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記旋回動作が行われた区画を畦際と判断し、前記旋回動作の操舵開始位置、操舵角、制動圧力、制動位置、前後進の切替位置、走行速度を、前記旋回動作の動作情報として前記地図情報に登録し、前記車両本体(1a)を自律走行させる入力がされた場合に、前記旋回動作の情報に基づいて前記車両本体(1a)を旋回させることを特徴とする請求項2に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記作業機(18)の種類情報と前記作業機(18)の作業時の高さとを前記地図情報に登録し、異なる作業機(18)が装着された場合に、前記地図情報に登録された前記作業機(18)の種類情報と作業時の高さに基づいて、装着された作業機(18)の作業時の高さを導出して、装着された作業機(18)の制御を行う、ことを特徴とする請求項1に記載の作業車両である。
【発明の効果】
【0010】
請求項1記載の発明によれば、車両本体(1a)の走行時における制動装置(203)の作動に関する情報と、操舵角検出部材(SN1)により検出された操舵の情報と、切替部材(211)の操作の情報とを、圃場の地図情報の車両本体(1a)の位置に対応させて登録することで、作業車両の走行により発生する圃場の状態を次回以降の作業に利用可能にすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業車
3日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
田植え機
3日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
圃場作業機
20日前
井関農機株式会社
コンバイン
27日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
9日前
井関農機株式会社
充電システム
20日前
井関農機株式会社
作業システム
1か月前
井関農機株式会社
根菜類収穫機
3日前
井関農機株式会社
収穫作業車両
1か月前
井関農機株式会社
電動乗用田植機
1か月前
井関農機株式会社
汎用コンバイン
23日前
井関農機株式会社
乗用電動芝刈り機
10日前
井関農機株式会社
作業車両の走行経路生成システム
11日前
井関農機株式会社
バイオ燃料利用ディーゼルエンジン
25日前
井関農機株式会社
苗移植機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ