TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025084174
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023197846
出願日
2023-11-22
発明の名称
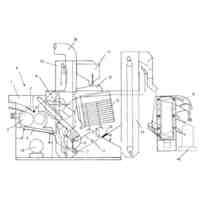
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20250527BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】従来の技術に比べて、同じ圃場でも作業の度に作業領域が異なる場合でも、圃場の作業領域を適切に設定すること。
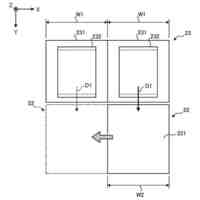
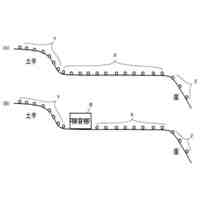
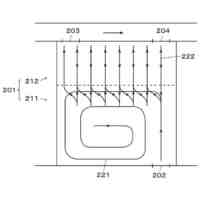
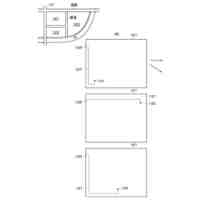
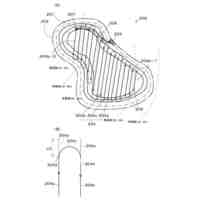
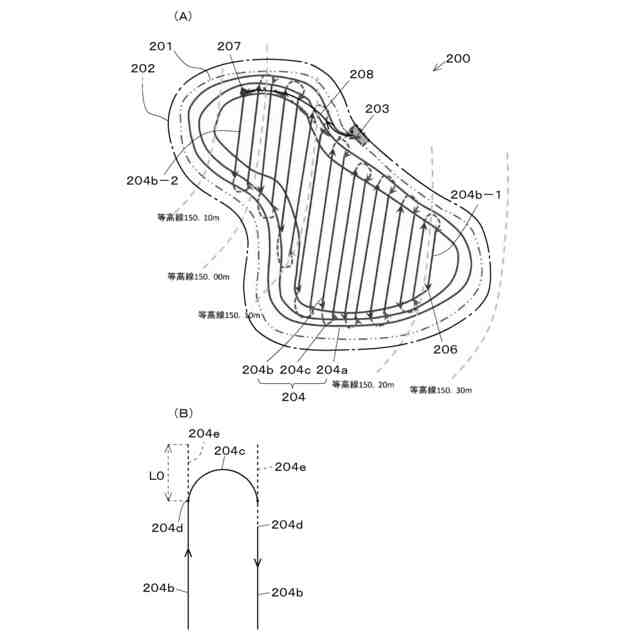
【解決手段】圃場の外周を車両本体(1a)が走行する際に測位装置(101,102)で計測された位置情報に基づいて走行軌跡(201)を計測し、圃場の外周の走行軌跡(201)に基づいて圃場内で作業を行う作業経路(204)を生成するとともに、走行軌跡(201)よりも予め定められた長さ外側に離れた線を作業領域の外縁(202)とし、前記作業経路(204)に沿って前記車両本体(1a)を自動走行させることで、従来の技術に比べて、同じ圃場でも作業の度に作業領域が異なる場合でも、圃場の作業領域を適切に設定することができる。
【選択図】図5
特許請求の範囲
【請求項1】
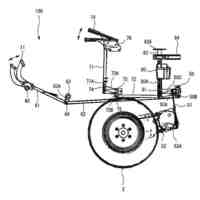
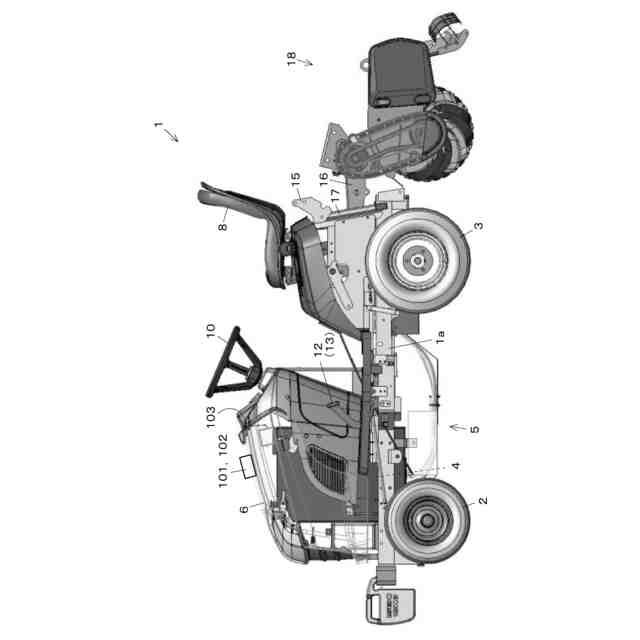
車両本体(1a)に支持されて圃場に対して作業を行う作業機(18)と、
前記車両本体(1a)の位置を計測する測位装置(101,102)と、
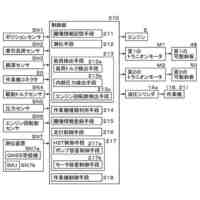
前記圃場の外周を前記車両本体(1a)が走行する際に前記測位装置(101,102)で計測された位置情報に基づいて走行軌跡(201)を計測し、前記圃場の外周の走行軌跡(201)に基づいて、前記圃場内で作業を行う作業経路(204)を生成するとともに、前記圃場の外周の走行軌跡(201)に基づいて、前記走行軌跡(201)よりも予め定められた長さ外側に離れた線を作業領域の外縁(202)とする作業マップを生成し、前記作業経路(204)に沿って前記車両本体(1a)を自動走行させる制御手段(C)と、
を備えたことを特徴とする作業車両。
続きを表示(約 1,000 文字)
【請求項2】
前記制御手段(C)は、
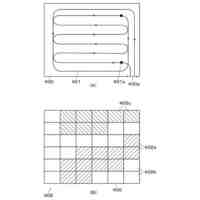
前記圃場の外周に沿って作業を行う周り仕上げライン(204a)と、前記周り仕上げライン(204a)の内側の領域において直線状の経路に沿って往復しながら作業を行う直線ライン(204b)と、を生成し、
前記周り仕上げライン(204a)の内周端に最も近い直線ライン(204b-1)の一端を前記直線ライン(204b-1)から前記周り仕上げライン(204a)に移行する結合ポイント(206)とし、
前記結合ポイント(206)が一端の直線ライン(204b-1)から最も離れた直線ラインを作業開始ライン(204b-2)とし、
前記結合ポイント(206)に向かう方向を一端が結合ポイント(206)の直線ライン(204b-1)における前記車両本体(1a)の進行方向に設定し、
前記一端が結合ポイント(206)の直線ライン(204b-1)から前記作業開始ライン(204b-2)までの間に並行する前記直線ライン(204b)の進行方向を交互に変更して進行方向を設定し、
前記作業開始ライン(204b-2)の進行方向の開始点(207)から、前記周り仕上げライン(204a)の終了点(203)までを連結する一筆書き状の前記作業経路(204)を作成する
ことを特徴とする請求項1に記載の作業車両。
【請求項3】
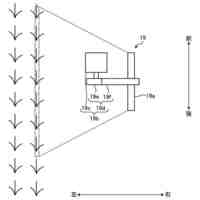
前記作業機(18)に応じて、先行の前記直線ライン(204b)から後続の前記直線ライン(204b)へ旋回を開始する位置(314,324)を補正する前記制御手段(C)、
を備えたことを特徴とする請求項2に記載の作業車両。
【請求項4】
前記作業経路(204)を走行中に作業を中断して前記作業経路(204)を離脱した後に、中断した中断位置(209)から作業を再開する場合に、前記作業が中断された直線ライン(204b-3)の後続の直線ライン(204b-4)と前記周り仕上げライン(204a)との交点(213)であって前記後続の直線ライン(204b-4)の進行方向前側の前記交点(213)に基づいて、前記中断位置(209)に対して、前記交点(213)側から前記車両本体(1a)を進入させて前記作業を再開させる前記制御手段(C)、
を備えたことを特徴とする請求項2に記載の作業車両。
【請求項5】
前記予め定められた長さは、前記作業機(18)の幅(L)に基づく長さである
ことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、作業車両に関し、特に、予め定められた作業経路に沿って走行が可能な作業車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
圃場の近傍に衛星測位装置である基地局を設置し、第1測位装置が搭載された第1作業車両で圃場の内周を周回させて、第1測位装置で検出された第1車体位置と基地局の位置である第1基準位置との相対位置に基づいて、圃場の地図情報である第1圃場マップを作成する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2022-118020号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の従来技術では、畦や農道等で圃場の境界が明確であることが前提であるが、牧草地等の圃場は、境界、区画が明確でない場合もある。牧草地は、その年々で必要な牧草の量応じて牧草地の範囲が変わることも珍しくなく、牧草を植える範囲が異なったり、プレハブの納屋を建てたり建てなかったりすることがあって、作業する範囲が変化する場合がある。
また、牧草を植えた範囲に対して、行われる作業によって使用される作業機の種類が異なるが、作業機の種類が異なると、牧草が植えられた範囲に対して、作業車両が通過する範囲が異なり、最初に設定された圃場の範囲や作業経路では、自動走行時に旋回や周回等ができない恐れがある。
【0005】
本発明は、従来の技術に比べて、同じ圃場でも作業の度に作業領域が異なる場合でも、圃場の作業領域を適切に設定することを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、車両本体(1a)に支持されて圃場に対して作業を行う作業機(18)と、前記車両本体(1a)の位置を計測する測位装置(101,102)と、前記圃場の外周を前記車両本体(1a)が走行する際に前記測位装置(101,102)で計測された位置情報に基づいて走行軌跡(201)を計測し、前記圃場の外周の走行軌跡(201)に基づいて、前記圃場内で作業を行う作業経路(204)を生成するとともに、前記圃場の外周の走行軌跡(201)に基づいて、前記走行軌跡(201)よりも予め定められた長さ外側に離れた線を作業領域の外縁(202)とする作業マップを生成し、前記作業経路(204)に沿って前記車両本体(1a)を自動走行させる制御手段(C)と、を備えたことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記制御手段(C)は、前記圃場の外周に沿って作業を行う周り仕上げライン(204a)と、前記周り仕上げライン(204a)の内側の領域において直線状の経路に沿って往復しながら作業を行う直線ライン(204b)と、を生成し、前記周り仕上げライン(204a)の内周端に最も近い直線ライン(204b-1)の一端を前記直線ライン(204b-1)から前記周り仕上げライン(204a)に移行する結合ポイント(206)とし、前記結合ポイント(206)が一端の直線ライン(204b-1)から最も離れた直線ラインを作業開始ライン(204b-2)とし、前記結合ポイント(206)に向かう方向を一端が結合ポイント(206)の直線ライン(204b-1)における前記車両本体(1a)の進行方向に設定し、前記一端が結合ポイント(206)の直線ライン(204b-1)から前記作業開始ライン(204b-2)までの間に並行する前記直線ライン(204b)の進行方向を交互に変更して進行方向を設定し、前記作業開始ライン(204b-2)の進行方向の開始点(207)から、前記周り仕上げライン(204a)の終了点(203)までを連結する一筆書き状の前記作業経路(204)を作成することを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記作業機(18)に応じて、先行の前記直線ライン(204b)から後続の前記直線ライン(204b)へ旋回を開始する位置(314,324)を補正する前記制御手段(C)を備えたことを特徴とする請求項2に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記作業経路(204)を走行中に作業を中断して前記作業経路(204)を離脱した後に、中断した中断位置(209)から作業を再開する場合に、前記作業が中断された直線ライン(204b-3)の後続の直線ライン(204b-4)と前記周り仕上げライン(204a)との交点(213)であって前記後続の直線ライン(204b-4)の進行方向前側の前記交点(213)に基づいて、前記中断位置(209)に対して、前記交点(213)側から前記車両本体(1a)を進入させて前記作業を再開させる前記制御手段(C)を備えたことを特徴とする請求項2に記載の作業車両である。
【0010】
請求項5に記載の発明は、前記予め定められた長さは、前記作業機(18)の幅(L)に基づく長さであることを特徴とする請求項1に記載の作業車両である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
17日前
井関農機株式会社
移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
苗移植機
23日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
調製設備
24日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
精米設備
19日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
19日前
井関農機株式会社
精米設備
1か月前
井関農機株式会社
コンバイン
26日前
井関農機株式会社
EGR装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ