TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025064757
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023174738
出願日
2023-10-06
発明の名称
制御装置
出願人
東洋電機製造株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
21/18 20160101AFI20250410BHJP(電力の発電,変換,配電)
要約
【課題】複数の誘導電動機それぞれの電流を検出することなく、複数の誘導電動機のうち、角速度が他の誘導電動機と比べて増減した誘導電動機である逸脱誘導電動機を検出し、誘導電動機への過電流を防ぐ。
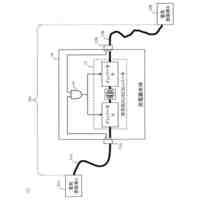
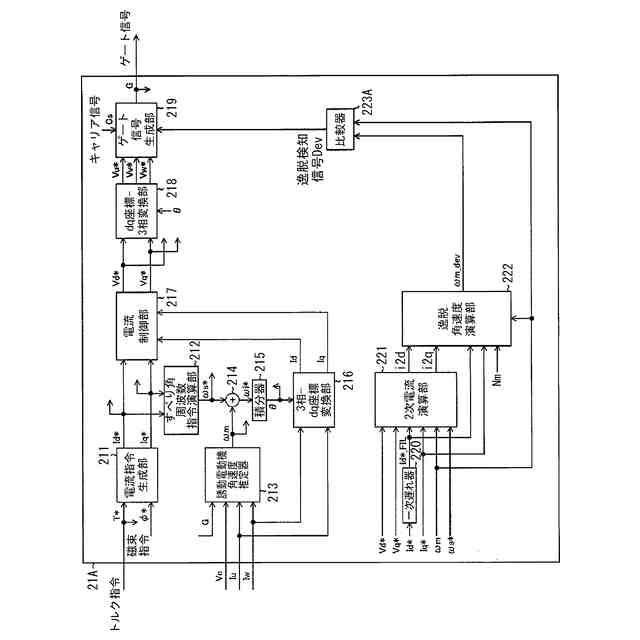
【解決手段】制御装置1は、誘導電動機15の励磁電流指令を一次遅れ加工する一次遅れ器220と、複数の誘導電動機15全てに流れる2次電流を演算する2次電流演算部221と、複数の誘導電動機15のうち、角速度が他の誘導電動機15と比べて増減した逸脱誘導電動機の角速度である逸脱誘導電動機角速度を演算する逸脱角速度演算部222と、逸脱誘導電動機角速度と、インバータ14から複数の誘導電動機15への出力電流に基づき推定される複数の誘導電動機15の角速度である誘導電動機推定角速度とを比較する比較器223Aと、を備え、比較の結果に基づき、複数の誘導電動機15を制御する。
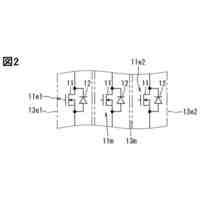
【選択図】図2
特許請求の範囲
【請求項1】
インバータにより駆動される複数の誘導電動機を制御する制御装置であって、
前記誘導電動機の励磁電流を指示する励磁電流指令を一次遅れ加工する一次遅れ器と、
前記複数の誘導電動機全てに流れる2次電流を演算する2次電流演算部と、
前記複数の誘導電動機のうち、角速度が他の誘導電動機と比べて増減した逸脱誘導電動機の角速度である逸脱誘導電動機角速度を演算する逸脱角速度演算部と、
前記逸脱誘導電動機角速度と、前記インバータから前記複数の誘導電動機への出力電流に基づき推定される前記複数の誘導電動機の角速度である誘導電動機推定角速度とを比較する比較器と、を備え、
前記比較の結果に基づき、前記複数の誘導電動機を制御し、
前記2次電流演算部は、式(1),(2)に基づき、前記2次電流を演算し、
JPEG
2025064757000022.jpg
21
170
前記逸脱角速度演算部は、式(3),(4),(5),(6),(7)に基づき、前記逸脱誘導電動機角速度を演算し、
JPEG
2025064757000023.jpg
53
170
ここで、
i2dは2次電流d軸成分であり、i2qは2次電流q軸成分であり、
Vd
*
はd軸電圧指令であり、Vq
*
はq軸電圧指令であり、
ωmは前記誘導電動機推定角速度であり、ωs
*
は前記誘導電動機のすべり角周波数指令であり、
Id
*
_FILは前記励磁電流指令を一次遅れ加工したものであり、Iq
*
はトルク分電流指令であり、
T
*
はトルク指令であり、
ωs_dは逸脱すべり角周波数第1成分であり、ωs_qは逸脱すべり角周波数第2成分であり、
ωm_devは前記逸脱誘導電動機角速度であり、
Nmは前記誘導電動機の並列接続数であり、
L1は前記誘導電動機の1次自己インダクタンスであり、L2は前記誘導電動機の2次自己インダクタンスであり、MMは前記誘導電動機の相互インダクタンスであり、R1は前記誘導電動機の1次抵抗であり、R2は前記誘導電動機の2次抵抗である、制御装置。
続きを表示(約 1,900 文字)
【請求項2】
インバータにより駆動される複数の誘導電動機を制御する制御装置であって、
前記誘導電動機の励磁電流を指示する励磁電流指令を一次遅れ加工する一次遅れ器と、
前記複数の誘導電動機全てに流れる2次電流を演算する2次電流演算部と、
前記複数の誘導電動機全ての角速度が一致している場合に前記誘導電動機に流れる2次電流である推定2次電流を推定する推定2次電流演算部と、
前記2次電流の実効値である2次電流実効値を演算する2次電流実効値演算部と、
前記推定2次電流の実効値である推定2次電流実効値を演算する推定2次電流実効値演算部と、
前記2次電流実効値と前記推定2次電流実効値とを比較する比較器と、を備え、
前記比較の結果に基づき、前記複数の誘導電動機を制御し、
前記2次電流演算部は、式(8),(9)に基づき、前記2次電流を演算し、
JPEG
2025064757000024.jpg
23
170
前記推定2次電流演算部は、式(10),(11)に基づき、前記推定2次電流を演算し、
JPEG
2025064757000025.jpg
23
170
ここで、
i2dは2次電流d軸成分であり、i2qは2次電流q軸成分であり、
Vd
*
はd軸電圧指令であり、Vq
*
はq軸電圧指令であり、
ωmは前記インバータから前記複数の誘導電動機への出力電流に基づき推定される前記複数の誘導電動機の角速度である誘導電動機推定角速度であり、ωs
*
は前記誘導電動機のすべり角周波数指令であり、
Id
*
_FILは前記励磁電流指令を一次遅れ加工したものであり、Iq
*
はトルク分電流指令であり、
i2d_calは推定2次電流d軸成分であり、i2q_calは推定2次電流q軸成分であり、
L1は前記誘導電動機の1次自己インダクタンスであり、L2は前記誘導電動機の2次自己インダクタンスであり、MMは前記誘導電動機の相互インダクタンスであり、R1は前記誘導電動機の1次抵抗であり、R2は前記誘導電動機の2次抵抗である、制御装置。
【請求項3】
インバータにより駆動される複数の誘導電動機を制御する制御装置であって、
前記誘導電動機の励磁電流を指示する励磁電流指令を一次遅れ加工する一次遅れ器と、
前記複数の誘導電動機全ての角速度が一致している場合に前記誘導電動機に流れる2次電流である推定2次電流を推定する推定2次電流演算部と、
前記複数の誘導電動機全ての角速度が一致している場合のdq軸電圧である推定dq軸電圧を推定する推定dq軸電圧演算部と、
前記インバータの出力電圧を指示する出力電圧指令の実効値である電圧指令実効値を演算する出力電圧実効値演算部と、
前記推定dq軸電圧の実効値である推定電圧実効値を演算する推定dq軸電圧実効値演算部と、
前記電圧指令実効値と前記推定電圧実効値とを比較する比較器と、を備え、
前記比較の結果に基づき、前記複数の誘導電動機を制御し、
前記推定2次電流演算部は、式(12),(13)に基づき、前記推定2次電流を演算し、
JPEG
2025064757000026.jpg
22
170
前記推定dq軸電圧演算部は、式(14),(15)に基づき、前記推定dq軸電圧を演算し、
JPEG
2025064757000027.jpg
15
170
ここで、
i2d_calは推定2次電流d軸成分であり、i2q_calは推定2次電流q軸成分であり、
ωmは前記インバータから前記複数の誘導電動機への出力電流に基づき推定される前記複数の誘導電動機の角速度である誘導電動機推定角速度であり、ωs
*
は前記誘導電動機のすべり角周波数指令であり、
Id
*
_FILは前記励磁電流指令を一次遅れ加工したものであり、Iq*はトルク分電流指令であり、
Vd_calは推定d軸電圧であり、Vq_calは推定q軸電圧であり、
L1は前記誘導電動機の1次自己インダクタンスであり、L2は前記誘導電動機の2次自己インダクタンスであり、MMは前記誘導電動機の相互インダクタンスであり、R1は前記誘導電動機の1次抵抗であり、R2は前記誘導電動機の2次抵抗である、制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の誘導電動機を制御する制御装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
誘導電動機の角速度を検出する角速度検出器を用いずに、インバータにより駆動される複数の誘導電動機を制御する制御装置では、インバータが出力する電圧および電流を用いて誘導電動機の角速度を推定することが一般的である。
【0003】
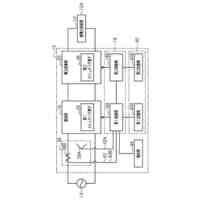
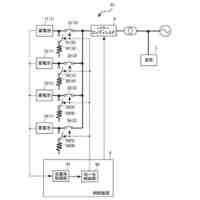
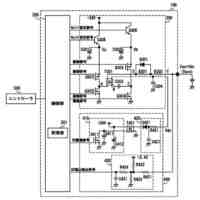
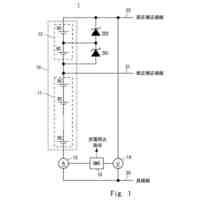
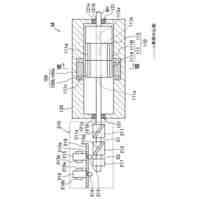
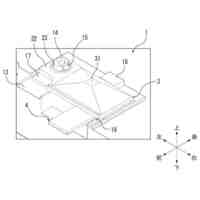
図1は、角速度検出器を用いずに複数の誘導電動機15を制御する制御装置1の構成例を示す図である。図1においては、並列に接続された4台の誘導電動機15a~15dを制御する例を示している。
【0004】
図1に示すように、制御装置1は、電源11と、リアクトル12と、コンデンサ13と、インバータ14と、電流センサ16a,16bと、電圧センサ17と、制御部21とを備える。
【0005】
リアクトル12は、一端が電源11の正極に接続され、他端がインバータ14に接続される。コンデンサ13は、一端がリアクトル12の他端に接続され、他端が電源11の負極に接続される。電源11の負極はインバータ14に接続される。電源11から出力された直流電流は、リアクトル12を介して、コンデンサ13により平滑化されてインバータ14に入力される。インバータ14は、制御部21から入力されるゲート信号Gに基づき、素子をスイッチング動作させ、入力された直流電流を交流電流に変換して、誘導電動機15a~15dに出力する。
【0006】
電流センサ16aは、インバータ14から誘導電動機15に流れるU相電流Iuを検出し、検出結果を制御部21に出力する。電流センサ16bは、インバータ14から誘導電動機15に流れるW相電流Iwを検出し、検出結果を制御部21に出力する。なお、図1においては、2相分の電流(U相電流IuおよびW相電流Iw)を検出する例を示しているが、3相分の電流が検出されてもよい。
【0007】
電圧センサ17は、コンデンサ13に印加されるコンデンサ印加電圧Vcを検出し、検出結果を制御部21に出力する。
【0008】
制御部21は、U相電流IuおよびW相電流Iwの検出結果、および、コンデンサ印加電圧Vcの検出結果に基づき、インバータ14の出力を制御するゲート信号Gをインバータ14に出力する。
【0009】
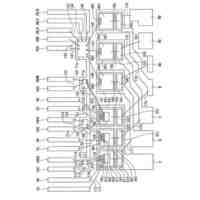
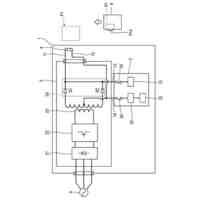
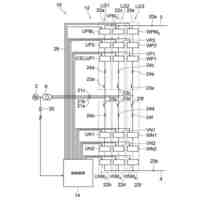
図5は、制御部21としての、従来の制御部21aの構成例を示す図である。
【0010】
図5に示すように、制御部21aは、電流指令生成部211と、すべり角周波数指令演算部212と、誘導電動機角速度推定器213と、加算器214と、積分器215と、3相-dq座標変換部216と、電流制御部217と、dq座標-3相変換部218と、ゲート信号生成部219とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
14日前
個人
発電機
10日前
ニデック株式会社
モータ
6日前
株式会社アイシン
車両用駆動装置
22日前
株式会社シマノ
電力供給装置
15日前
富士電機株式会社
半導体装置
14日前
株式会社アイドゥス企画
負荷追従電動モータ
今日
株式会社ダイヘン
電圧調整装置
6日前
トヨタ自動車株式会社
蓄電池制御装置
16日前
株式会社ダイヘン
電力システム
16日前
株式会社浅羽製作所
通線用先端誘導具
21日前
日本航空電子工業株式会社
シール構造体
24日前
株式会社ダイヘン
蓄電池システム
21日前
株式会社ゲットクリーンエナジー
発電機
7日前
株式会社アイシン
回転電機用ステータ製造方法
1日前
株式会社アイシン
回転電機用ステータ製造方法
1日前
トヨタ紡織株式会社
磁石挿入装置
6日前
株式会社アイドゥス企画
磁力トルクコンバータ
今日
キヤノン株式会社
電源装置、画像形成装置
15日前
株式会社ダイヘン
無線給電システム
6日前
トヨタ自動車株式会社
充電制御装置
14日前
矢崎総業株式会社
グロメット
24日前
GX株式会社
可搬式太陽光発電用電源装置
14日前
株式会社オリジン
充電器
24日前
シンフォニアテクノロジー株式会社
充電装置
15日前
本田技研工業株式会社
回転電機
24日前
トヨタバッテリー株式会社
二次電池システム
6日前
マツダ株式会社
モータ
16日前
マツダ株式会社
モータ
16日前
株式会社デンソー
電力変換装置
7日前
株式会社TMEIC
電力変換装置
14日前
株式会社豊田自動織機
回転電機
6日前
株式会社キャップ
アキシャルギャップモータ
10日前
個人
同期回転電機
21日前
株式会社豊田自動織機
回転電機
6日前
矢崎総業株式会社
電気接続箱
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ