TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065910
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023175435
出願日
2023-10-10
発明の名称
制御装置
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G05B
13/02 20060101AFI20250415BHJP(制御;調整)
要約
【課題】制御対象の入力または出力の制約を満たし、応答が所望のプロフィールとなるPID制御ゲイン値に自動チューニングする。
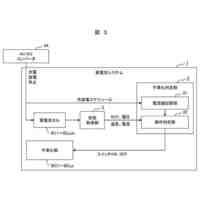
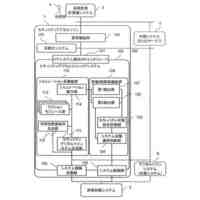
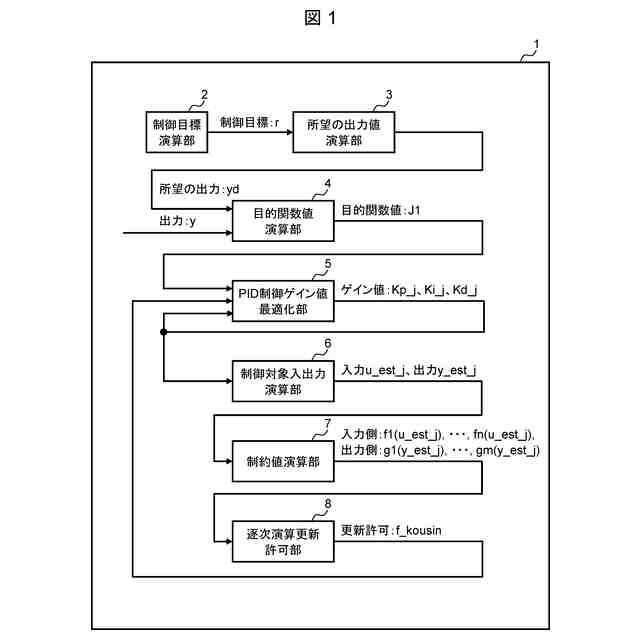
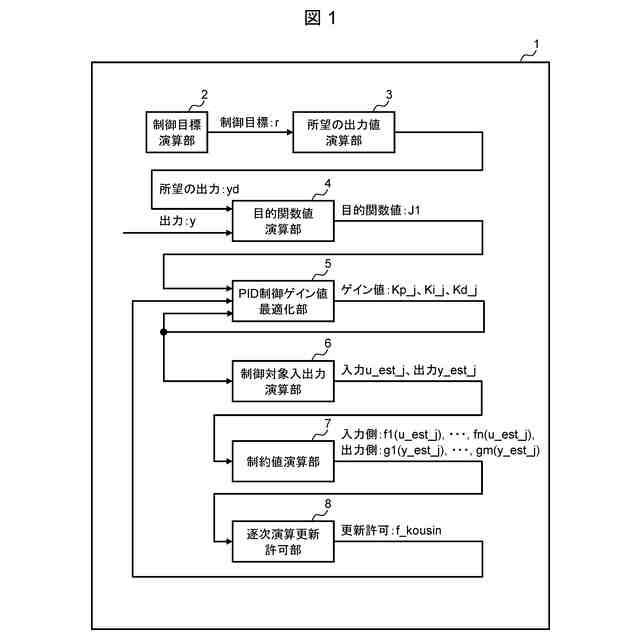
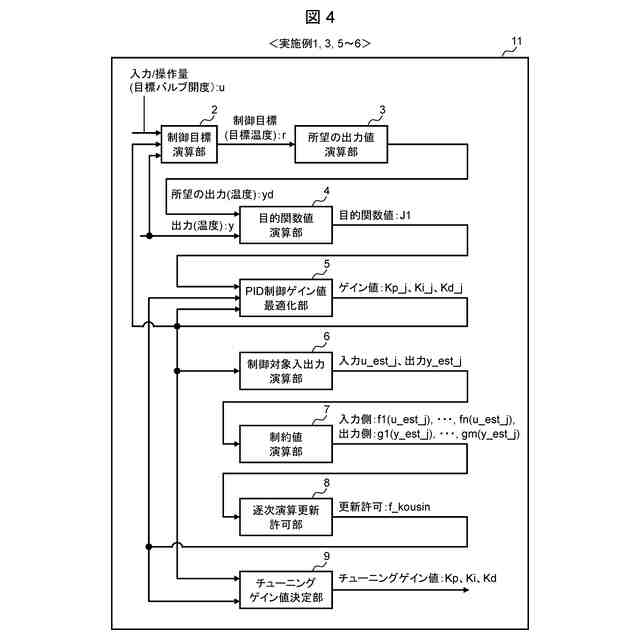
【解決手段】PID制御のPIDゲイン値Kp、Ki、Kdの値を自動チューニングする装置において、制御目標rを演算する手段を備え、制御目標rに対する制御対象の所望の出力ydを演算する手段を備え、少なくとも、制御対象の実際の出力yと所望の出力ydとの誤差e1の二乗値である目的関数値J1を演算する手段と、J1が小さくなるPID制御の各制御ゲイン値を逐次演算により最適化演算する手段と、逐次演算におけるj回目の逐次演算値であるゲイン値に基づいて、制御対象への入力もしくは/かつ制御対象からの出力を演算する手段と、入力もしくは出力に基づいて、制約値を演算する手段と、制約値が、全て所定範囲内にあるとき、逐次演算を更新する手段とを備えたことを特徴とする制御装置。
【選択図】図1
特許請求の範囲
【請求項1】
PID制御のPIDゲイン値Kp、Ki、Kdの値を自動チューニングする装置において、
制御目標rを演算する手段を備え、
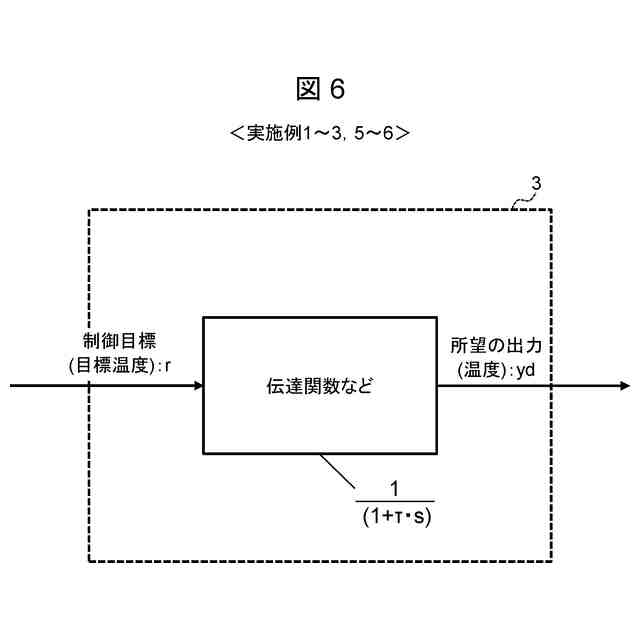
制御目標rに対する制御対象の所望の出力ydを演算する手段を備え、
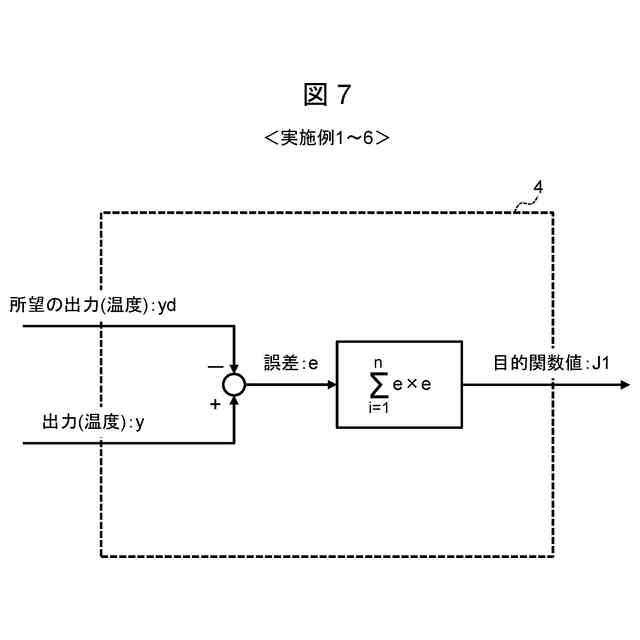
少なくとも、前記制御対象の実際の出力yと前記所望の出力ydとの誤差e1の二乗値である目的関数値J1を演算する手段と、
前記J1が小さくなるように、PID制御の各制御ゲイン値を逐次演算により最適化演算する手段と、
前記逐次演算におけるj回目の逐次演算値であるゲイン値Kp_j、Ki_j、Kd_jに基づいて、当該ゲイン値Kp_j、Ki_j、Kd_jを前記PID制御のゲイン値として用いた時の前記制御対象への入力u_est_jもしくは/かつ制御対象からの出力y_est_jを演算する手段と、
前記入力u_est_jもしくは出力y_est_jに基づいて、制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)を演算する手段と、
前記制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)が、全て所定範囲内にあるとき、前記逐次演算を更新する手段と
を備えたことを特徴とする制御装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1において、
前記制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)の少なくともひとつが所定範囲内にないとき、
前記逐次演算を停止し、更新回数j-1回目のゲイン値Kp_j-1、Ki_j-1、Kd_j-1をチューニング値として採用する
ことを特徴とする制御装置。
【請求項3】
請求項1において、
前記制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)の少なくともひとつが所定範囲内にないとき、
前記逐次演算を停止し、前記制約値の全てが所定範囲内にあり、かつ、前記J1が最小となる更新回のときのゲイン値Kp_m、Ki_m、Kd_mをチューニング値として採用する
ことを特徴とする制御装置。
【請求項4】
請求項1において、
前記逐次演算において、各制御ゲイン値の複数組の候補を用いて、最適化演算する手段を備え、
前記複数組における各組のゲイン値に対して、それぞれ、前記入力u_jもしくは出力y_jに基づいて、制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)を演算する手段と、
各組の制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)の中で制約を満たす組のみを用いて、前記逐次演算における更新を行う
ことを特徴とする制御装置。
【請求項5】
請求項1において、
前記制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)の少なくともひとつが所定範囲内にないとき、
前記逐次演算を停止し、
前記所望の出力ydを演算する手段のパラメータ値を更新し、
当該パラメータ値をもつ前記所望の出力yd演算手段を用いて、
あらためて、
前記J1が小さくなるように、前記逐次演算を用いて、
前記ゲイン値Kp、Ki、Kdのチューニングを行う
ことを特徴とする制御装置。
【請求項6】
請求項1において、
前記制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)の少なくともひとつが所定範囲内にないとき、
前記逐次演算を停止し、
「更新回数j-1回目のゲイン値Kp_j-1、Ki_j-1、Kd_j-1」
もしくは
「前記制約値の全てが所定範囲内にあり、かつ、前記J1が最小となる更新回のときのゲイン値Kp_m、Ki_m、Kd_m」
を用いて、
前記J1が小さくなるように、前記所望の出力ydを演算する手段のパラメータ値を更新し、
当該パラメータ値をもつ前記所望の出力yd演算手段を用いて、
あらためて、前記J1が小さくなるように、前記逐次演算を用いて、前記ゲイン値Kp、Ki、Kdのチューニングを行う
ことを特徴とする制御装置。
【請求項7】
請求項1において、
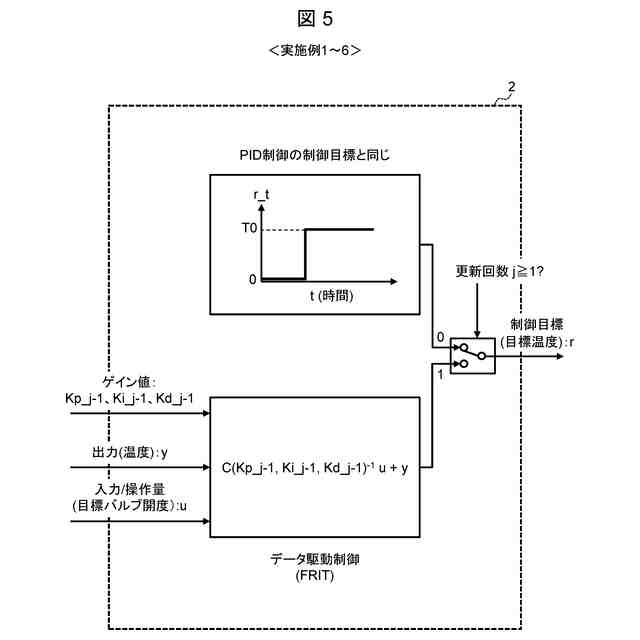
前記J1が小さくなるように、PID制御の各制御ゲイン値を逐次演算により最適化演算する手段はデータ駆動制御FRITである
ことを特徴とする制御装置。
【請求項8】
請求項1において、
前記PID制御のゲイン値Kp_j、Ki_j、Kd_jに基づいて、当該ゲイン値Kp_j、Ki_j、Kd_jを前記PID制御のゲイン値として用いた時の前記制御対象への入力u_jもしくは/かつy_jを演算する手段はデータ駆動予測である
ことを特徴とする制御装置。
【請求項9】
請求項1において、
前記制約値fk(u_est_j)は、前記制御対象への入力値の最大値である
ことを特徴とする制御装置。
【請求項10】
請求項1において、
前記制約値gk(y_est_j)は、前記制御対象の出力値のオーバーシュート量もしくはアンダーシュート量である
ことを特徴とする制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関するものであり、特に、制御対象の入力もしくは出力に対するなんらかの制約を満たしつつ、制御対象の応答が所望のプロフィールとなるようにPID制御のゲイン値を自動チューニングする制御装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
本技術の背景技術として、特開2021-015475号公報(特許文献1)がある。この文献には、「PID制御部、および、前記PID制御部とは別に設けられたフィルタ部を備え、制御対象をフィードバック制御するコントローラにおいて、前記コントローラのパラメータを設計する方法であって、前記制御対象の伝達関数および前記コントローラの伝達関数を基にして定められ、ロバスト安定性および外乱抑制特性を含む混合感度問題について、制御を行う周波数を含む周波数領域を離散化して得られた複数の周波数毎に、前記混合感度問題の制約条件を設定する設定工程と、前記制約条件での前記混合感度問題を最適化手法によって解くことにより、前記PID制御部および前記フィルタ部のそれぞれのパラメータにより構成される前記コントローラのパラメータを決定する決定工程と、を備える、パラメータ設計方法。([請求項1]参照)」と記載されている。
【0003】
また、特開2021-042671号公報(特許文献2)がある。この文献には、「制御対象の所望の出力値ydを演算する手段と、前記所望の出力値ydと制御対象の出力値y_0との差が小さくなるように、PID制御器のゲイン値を調整するPID制御器ゲイン値調整手段と、前記調整されたPIDゲイン値(Kp_1,Ki_1,Kd_1)を用いた場合の前記制御対象の出力y_1を予測する手段と、前記予測した制御対象の出力y_1が所定条件を満たしていないとき、前記調整されたPIDゲイン(Kp_1,Ki_1,Kd_1)を(実際の制御に)適用することを禁止する手段とを備えたことを特徴とする制御装置。([請求項1]参照)」と記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-015475号公報
特開2021-042671号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前述の先行技術(特許文献1)は、制御対象の周波数特性上の制約を満たすようにチューニングができるものの、入出力信号の制約を満たすようなパラメータ値にはチューニングするものではない。また、チューニングに際しては、制御対象のモデルも構築する必要があり、手間もかかり簡便な手法とは言い難い。
【0006】
また、先行技術(特許文献2)は、制御対象モデルを構築する必要があり、簡便な手法とは言い難い。さらに、チューニング値を用いた時の出力を予測し、当該出力が制約を満たさないときは、当該チューニング値を用いないことを開示しているのみで、入力に関する制約を考慮できておらず、さらには入出力信号に関する制約を満たすようなパラメータ値にチューニングするものでもない。
【課題を解決するための手段】
【0007】
上記課題を解決するために、例えば特許請求の範囲の記載の構成を採用する。本願は、上記課題を解決する手段を複数含んでいるが、例えば、
PID制御のPIDゲイン値Kp(Pゲイン)、Ki(Iゲイン)、Kd(Dゲイン)の値を自動チューニングする装置において、
制御目標rを演算する手段を備え、
制御目標rに対する制御対象の所望の出力ydを演算する手段を備え、
少なくとも、前記制御対象の実際の出力yと前記所望の出力ydとの誤差e1の二乗値である目的関数値J1を演算する手段と、
前記J1が小さくなるように、PID制御の各制御ゲイン値を逐次演算により最適化演算する手段と、
前記逐次演算におけるj回目の逐次演算値であるゲイン値Kp_j、Ki_j、Kd_jに基づいて、当該ゲイン値Kp_j、Ki_j、Kd_jを前記PID制御のゲイン値として用いた時の前記制御対象への入力u_est_jもしくは/かつ制御対象からの出力y_est_jを演算する手段と、
前記入力u_est_jもしくは出力y_est_jに基づいて、
制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)を演算する手段と、
前記制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)が、全て所定範囲内にあるとき、前記逐次演算を更新する手段と
を備えたことを特徴とする制御装置である。
【0008】
また、例えば、
前記制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)の少なくともひとつが所定範囲内にないとき、
前記逐次演算を停止し、更新回数j-1回目のゲイン値Kp_j-1、Ki_j-1、Kd_j-1をチューニング値として採用する
ことを特徴とする制御装置である。
【0009】
また、例えば、
前記制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)の少なくともひとつが所定範囲内にないとき、
前記逐次演算を停止し、前記制約値の全てが所定範囲内にあり、かつ、前記J1が最小となる更新回のときのゲイン値Kp_m、Ki_m、Kd_mをチューニング値として採用する
ことを特徴とする制御装置である。
【0010】
また、例えば、
前記逐次演算において、各制御ゲイン値の複数組の候補を用いて、最適化演算する手段を備え、
前記複数組における各組のゲイン値に対して、それぞれ、前記入力u_jもしくは出力y_jに基づいて、
制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)を演算する手段と、
各組の制約値f1(u_est_j),f2(u_est_j),・・・,fn(u_est_j)、g1(y_est_j),g2(y_est_j),・・・,gm(y_est_j)の中で制約を満たす組のみを用いて、前記逐次演算における更新を行う
ことを特徴とする制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
エレベーター
3日前
株式会社日立製作所
電力変換装置
3日前
株式会社日立製作所
電力変換装置
3日前
株式会社日立製作所
乗客コンベア
3日前
株式会社日立製作所
乗客コンベア
3日前
株式会社日立製作所
エレベーター
3日前
株式会社日立製作所
エレベーター
3日前
株式会社日立製作所
電力変換装置
3日前
株式会社日立製作所
漏水検出システム
3日前
株式会社日立製作所
エレベーター装置
3日前
株式会社日立製作所
エレベーター装置
3日前
株式会社日立製作所
ボルトの緩み検出装置
5日前
株式会社日立製作所
電力変換装置の冷却構造
3日前
株式会社日立製作所
巻上機及びエレベーター
3日前
株式会社日立製作所
ガイドレールの高さ調整装置
3日前
株式会社日立製作所
エレベーターの乗り場ドア装置
3日前
株式会社日立製作所
蓄電池システム及びその制御方法
11日前
株式会社日立製作所
細胞剥離装置および細胞剥離方法
4日前
株式会社日立製作所
設計支援装置、及び設計支援方法
5日前
株式会社日立製作所
計算機システム及びデータ管理方法
3日前
株式会社日立製作所
水電解システム及び水電解制御方法
7日前
株式会社日立製作所
エレベーター、及び巻上機の揚重方法
3日前
株式会社日立製作所
生成支援プログラムおよび生成支援装置
11日前
株式会社日立製作所
粒子線治療システムおよびその制御方法
4日前
株式会社日立製作所
表面欠陥検査装置および表面欠陥検査方法
7日前
日立Astemo株式会社
交流電動機制御装置
3日前
株式会社日立製作所
情報処理装置、情報処理システム及び情報処理方法
12日前
株式会社日立製作所
空間生成装置、空間生成方法及び空間生成プログラム
3日前
株式会社日立製作所
セキュリティ対策決定装置及びセキュリティ対策決定方法
4日前
株式会社日立製作所
地域情報管理装置、地域情報管理方法および地域情報管理プログラム
11日前
株式会社日立製作所
分析装置および分析方法
3日前
株式会社日立製作所
設備利用人数予測装置、設備利用人数予測システム、及び設備利用人数予測方法
3日前
株式会社日立製作所
証明書処理システム、証明生成システム、証明書処理方法、証明書処理プログラム
11日前
エイブリック株式会社
基準電圧回路
25日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
28日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ