TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025069263
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2025012618,2023042459
出願日
2025-01-29,2016-02-08
発明の名称
2つの基板保持領域を備えるロボットアームを有する装置
出願人
パーシモン テクノロジーズ コーポレイション
,
PERSIMMON TECHNOLOGIES, CORP.
代理人
個人
主分類
B25J
9/06 20060101AFI20250422BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業空間容積等を最小限に抑える基板搬送オートメーションを提供する。
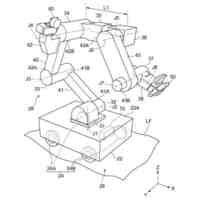
【解決手段】駆動部と;第1の上腕、第1の前腕、及び第1のエンドエフェクタを備える第1のロボットアームと;第2の上腕、第2の前腕、及び第2のエンドエフェクタを備える第2のロボットアームとを備える装置。第1及び第2の上腕はいずれも第1の回転軸で駆動部に接続され、第1及び第2のエンドエフェクタはそれぞれ2つの基板保持領域を備える。第1のロボットアームは、第2のロボットアームを動かすことなく、第2のエンドエフェクタの上方において第1の方向に、第1の後退位置から第1の伸長位置まで第1のエンドエフェクタを伸長させるように構成される。第2のロボットアームは、第1のロボットアームを動かすことなく、第1のエンドエフェクタの下方において第1の方向に、第2の後退位置から第2の伸長位置まで第2のエンドエフェクタを伸長させるように構成される。
【選択図】図42
特許請求の範囲
【請求項1】
装置であって、
駆動部と;
第1の上腕、第1の前腕、及び第1のエンドエフェクタを備える第1のロボットアームであって、前記第1の上腕は第1の回転軸で前記駆動部に接続され、前記第1のエンドエフェクタは横方向に間隔を空けて2つの基板保持領域を備える、第1のロボットアームと;
第2の上腕、第2の前腕、及び第2のエンドエフェクタを備える第2のロボットアームであって、前記第2の上腕は前記第1の回転軸で前記駆動部に接続され、前記第2のエンドエフェクタは横方向に間隔を空けて2つの基板保持領域を備える、第2のロボットアームと;
を有し、
前記第1のロボットアームは、前記第2のエンドエフェクタの上に重なる第1の後退位置に前記第1のエンドエフェクタを位置させるように構成され、前記第1のロボットアームは、前記第2のロボットアームを動かすことなく、前記第2のエンドエフェクタの上方において第1の方向に、前記第1の後退位置から第1の伸長位置まで前記第1のエンドエフェクタを伸長させるように構成され;
前記第2のロボットアームは、前記第1のエンドエフェクタの下に重なる第2の後退位置に前記第2のエンドエフェクタを位置させるように構成され、前記第2のロボットアームは、前記第1のロボットアームを動かすことなく、前記第1のエンドエフェクタの下方において前記第1の方向に、前記第2の後退位置から第2の伸長位置まで前記第2のエンドエフェクタを伸長させるように構成される;
装置。
続きを表示(約 810 文字)
【請求項2】
前記第1の上腕と前記第1の前腕とが異なる有効長を有し、前記第2の上腕と前記第2の前腕とが異なる有効長を有する、請求項1に記載の装置。
【請求項3】
前記第1の前腕と前記第2の前腕とが異なる有効長を有する請求項2に記載の装置。
【請求項4】
前記第1の上腕と前記第2の上腕とが異なる有効長を有する請求項3に記載の装置。
【請求項5】
前記第1の上腕と前記第1の前腕とが同じ有効長を有する請求項1に記載の装置。
【請求項6】
前記第1のエンドエフェクタはU字状の形状を呈し、前記第1の前腕は、前記U字状の形状の中心から外れた位置で前記第1のエンドエフェクタに連結されている、請求項1に記載の装置。
【請求項7】
前記第1のエンドエフェクタはV字状の形状を呈し、前記第1の前腕は、前記V字状の形状の中心から外れた位置で前記第1のエンドエフェクタに連結されている、請求項1に記載の装置。
【請求項8】
前記第1及び前記第2のロボットアームがそれぞれ前記第1及び前記第2の後退位置にあるとき、前記第1の上腕が前記第2の上腕と前記第2の前腕との間に位置する、請求項1に記載の装置。
【請求項9】
前記第1のエンドエフェクタは前記第1の前腕の下側に連結されている、請求項8に記載の装置。
【請求項10】
前記第1及び前記第2のエンドエフェクタが、前記第2の前腕の上側に接続される、請求項9に記載の装置であって、
前記第1及び前記第2のロボットアームがそれぞれの前記第1及び前記第2の後退位置にあるとき、前記第2のエンドエフェクタは、前記第1のエンドエフェクタの下側に並んでおり、前記第1のエンドエフェクタの底部に正対する、装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示される実施形態は、2つの基板保持領域を備えるロボットアームを有する装置に関する。
続きを表示(約 6,500 文字)
【背景】
【0002】
半導体、LED(Light Emitting Diode)、太陽光、MEMS(Micro Electro Mechanical Systems)またはその他のデバイスの製造に関連するものなどの用途のための真空、大気、および制御環境処理は、基板、および基板に関連する運搬台を保管場所、処理場所、またはその他の場所へ、またはそこから搬送するために、ロボット技術および他の形態のオートメーションを利用する。基板のこのような搬送は、1枚以上の基板を搬送する単一のアームを用いて、または1枚以上の基板を各々搬送する複数のアームを用いて、個々の基板、基板の集団を動かしてもよい。製造の多くは、例えば、半導体製造に関連するもののように、設置面積および容積が重要である清浄または真空環境内で行われる。さらに、自動搬送の多くは、搬送時間の最小化によってサイクル時間の短縮ならびに関連設備のスループットおよび利用率の増大がもたらされる場合に実施される。したがって、所与の範囲の搬送用途のために必要な設置面積および作業空間容積が最小限に抑えられ、搬送時間が最小限に抑えられる基板搬送オートメーションを提供することが望まれている。
【摘要】
【0003】
以下の摘要は単に、例示であることが意図される。本摘要は、特許請求の範囲を限定することを目的としていない。
【0004】
例示的実施形態の一例である装置は、
駆動部と;
第1の上腕、第1の前腕、及び第1のエンドエフェクタを備える第1のロボットアームであって、前記第1の上腕は第1の回転軸で前記駆動部に接続され、前記第1のエンドエフェクタは横方向に間隔を空けて2つの基板保持領域を備える、第1のロボットアームと;
第2の上腕、第2の前腕、及び第2のエンドエフェクタを備える第2のロボットアームであって、前記第2の上腕は前記第1の回転軸で前記駆動部に接続され、前記第2のエンドエフェクタは横方向に間隔を空けて2つの基板保持領域を備える、第2のロボットアームと;
を有し、
前記第1のロボットアームは、前記第2のエンドエフェクタの上に重なる第1の後退位置に前記第1のエンドエフェクタを位置させるように構成され、前記第1のロボットアームは、前記第2のロボットアームを動かすことなく、前記第2のエンドエフェクタの上方において第1の方向に、前記第1の後退位置から第1の伸長位置まで前記第1のエンドエフェクタを伸長させるように構成され;
前記第2のロボットアームは、前記第1のエンドエフェクタの下に重なる第2の後退位置に前記第2のエンドエフェクタを位置させるように構成され、前記第2のロボットアームは、前記第1のロボットアームを動かすことなく、前記第1のエンドエフェクタの下方において前記第1の方向に、前記第2の後退位置から第2の伸長位置まで前記第2のエンドエフェクタを伸長させるように構成される。
【0005】
例示的実施形態の一例である別の装置は、
複数の同軸駆動シャフトを備える駆動部と;
第1の上腕、第1の前腕、及び第1のエンドエフェクタを備える第1のロボットアームであって、前記第1の上腕が前記複数の同軸駆動シャフトのうちの第1のものに接続され、前記第1のエンドエフェクタが横方向に間隔を空けて2つの基板保持領域を備え、前記第1の前腕が、前記第1のエンドエフェクタの第1の中心線からオフセットしている第1の手首接続部において前記第1のエンドエフェクタに接続される、第1のロボットアームと;
第2の上腕、第2の前腕、及び第2のエンドエフェクタを有する第2のロボットアームであって、前記第2の上腕が前記複数の同軸駆動シャフトのうちの第2のものに接続され、前記第2のエンドエフェクタが横方向に間隔を空けて2つの基板保持領域を備え、前記第2の前腕が、前記第2のエンドエフェクタの第2の中心線からオフセットしている第2の手首接続部において前記第2のエンドエフェクタに接続される、第2のロボットアームと;
を備え、
前記第1のロボットアームは、前記第2のエンドエフェクタの上に重なる第1の後退位置に前記第1のエンドエフェクタを位置させるように構成され、前記第1のロボットアームは、前記第2のエンドエフェクタの上方において第1の方向に、前記第1の後退位置から第1の伸長位置まで前記第1のエンドエフェクタを伸長させるように構成され;
前記第2のロボットアームは、前記第1のエンドエフェクタの下に重なる第2の後退位置に前記第2のエンドエフェクタを位置させるように構成され、前記第2のロボットアームは、前記第1のエンドエフェクタの下方において前記第1の方向に、前記第2の後退位置から第2の伸長位置まで前記第2のエンドエフェクタを伸長させるように構成される。
【0006】
例示的実施形態の一態様では、搬送装置は、少なくとも1つの駆動装置と、第1の上腕、第1の前腕および第1のエンドエフェクタを備えた第1のロボットアームと、第2の上腕、第2の前腕および第2のエンドエフェクタを備えた第2のロボットアームとを備える。前記第1の上腕は、第1の回転軸において前記少なくとも1つの駆動装置に接続される。前記第2の上腕は、前記第1の回転軸から離間された第2の回転軸において前記少なくとも1つの駆動装置に接続される。前記第1および第2のロボットアームは、前記第1および第2のエンドエフェクタを、前記1および第2のエンドエフェクタ上に配置された複数の基板を少なくとも部分的に上下に積み重ねるために第1の収縮位置にセットするように構成される。前記第1および第2のロボットアームは、前記第1の収縮位置から、少なくとも部分的に直接上下に位置する平行な第1の経路に沿う第1の方向に前記第1および第2のエンドエフェクタを伸長させるように構成される。前記第1および第2のロボットアームは、上下に位置していない、互いから離間された第2の経路に沿う少なくとも1つの第2の方向に前記第1および第2のエンドエフェクタを伸長させるように構成される。前記第1の上腕および前記第1の前腕は異なる有効長を有する。前記第2の上腕および前記第2の前腕は異なる有効長を有する。
例示的実施形態の別の態様では、方法が提供され、当該方法は、第1の上腕、第1の前腕および第1のエンドエフェクタを備え、前記第1の上腕および前記第1の前腕が異なる有効長を有する、第1のロボットアームを提供することと、第2の上腕、第2の前腕および第2のエンドエフェクタを備え、前記第2の上腕および前記第2の前腕が異なる有効長を有する、第2のロボットアームを提供することと、前記第1の上腕を第1の回転軸において少なくとも1つの駆動装置に接続することと、前記第2の上腕を前記第1の回転軸から離間された第2の回転軸において前記少なくとも1つの駆動装置に接続することと、を含む。前記第1および第2のロボットアームは、前記第1および第2のエンドエフェクタを、これらのエンドエフェクタ上に配置された複数の基板を少なくとも部分的に上下に積み重ねるために第1の収縮位置にセットするように構成され、前記第1および第2のロボットアームは、前記第1の収縮位置から、少なくとも部分的に直接上下に位置する平行な第1の経路に沿う第1の方向に前記第1および第2のエンドエフェクタを伸長させるように構成され、前記第1および第2のロボットアームは、上下に位置していない、互いから離間された第2の経路に沿う少なくとも1つの第2の方向に前記第1および第2のエンドエフェクタを伸長させるように構成される。
例示的実施形態の別の態様では、方法が提供され、当該方法は、第1のロボットアームの第1のエンドエフェクタおよび第2のロボットアームの第2のエンドエフェクタを、これらのエンドエフェクタ上に配置された複数の基板を少なくとも部分的に上下に積み重ねるために第1の収縮位置にセットすることを含む。ここで前記第1のロボットアームは、第1の上腕、第1の前腕および前記第1のエンドエフェクタを備え、前記第1の上腕は、第1の回転軸において少なくとも1つの駆動装置に接続され、前記第2のロボットアームは、第2の上腕、第2の前腕および前記第2のエンドエフェクタを備え、前記第2の上腕は、前記第1の回転軸から離間された第2の回転軸において前記少なくとも1つの駆動装置に接続される。前記方法はさらに、前記第1および第2のロボットアームを移動させて、第1の収縮位置から、少なくとも部分的に直接上下に位置する平行な第1の経路に沿う第1の方向に前記第1および第2のエンドエフェクタを移動させることと、前記第1および第2のロボットアームを移動させて、上下に位置していない、互いから離間された第2の経路に沿う少なくとも1つの第2の方向に前記第1および第2のエンドエフェクタを伸長させるようにこれらのエンドエフェクタを移動させることと、を含む。
【0007】
例示的実施形態の別の態様では、搬送装置は、第1の上腕、第1の前腕および第1のエンドエフェクタを備えた第1のロボットアームと、第2の上腕、第2の前腕および第2のエンドエフェクタを備えた第2のロボットアームと、前記第1および第2のロボットアームに接続された駆動装置と、を備える。前記第1の上腕は、第1の回転軸において前記駆動装置に接続される。前記第2の上腕は、前記第1の回転軸から離間された第2の回転軸において前記駆動装置に接続される。前記第1および第2の上腕を回転させるために、前記駆動装置は3つのみのモータを備える。前記第1および第2のロボットアームは、前記第1および第2のエンドエフェクタを、これらのエンドエフェクタ上に配置された複数の基板を少なくとも部分的に上下に積み重ねるために第1の収縮位置にセットするように構成され、前記第1および第2のロボットアームは、前記第1の収縮位置から、少なくとも部分的に直接上下に位置する平行な第1の経路に沿う第1の方向に前記第1および第2のエンドエフェクタを伸長させるように構成され、前記第1および第2のロボットアームは、上下に位置していない、互いから離間された第2の経路に沿う少なくとも1つの第2の方向に前記第1および第2のエンドエフェクタを伸長させるように構成される。
【0008】
例示的実施形態の別の態様では、方法は、第1のロボットアームの第1のエンドエフェクタおよび第2のロボットアームの第2のエンドエフェクタを、これらのエンドエフェクタ上に配置された複数の基板を少なくとも部分的に上下に積み重ねるために第1の収縮位置にセットすることを含む。ここで前記第1のロボットアームは、第1の上腕、第1の前腕および前記第1のエンドエフェクタを備え、前記第1の上腕は、第1の回転軸において駆動装置に接続され、前記第2のロボットアームは、第2の上腕、第2の前腕および前記第2のエンドエフェクタを備え、前記第2の上腕は、前記第1の回転軸から離間された第2の回転軸において前記駆動装置に接続される。前記方法はさらに、前記第1および第2のロボットアームを移動させて、前記第1の収縮位置から、少なくとも部分的に直接上下に位置する平行な第1の経路に沿う第1の方向に前記第1および第2のエンドエフェクタを移動させることと、前記第1および第2のロボットアームを移動させて、上下に位置していない、互いから離間された第2の経路に沿う少なくとも1つの第2の方向に前記第1および第2のエンドエフェクタを伸長させるようにこれらのエンドエフェクタを移動させることと、前記第1および第2の回転軸から離間された第3の回転軸の周りで前記第1および第2のロボットアームを一緒に回転させることと、を含む。前記第1の収縮位置から前記第1の方向に前記移動させることと、前記少なくとも1つの第2の方向に前記第1および第2のエンドエフェクタを伸長させるように前記移動させることと、前記回転させることとは、前記駆動装置の3つのみのモータの使用によって行われる。
【0009】
例示的実施形態の別の態様では、方法は、第1の上腕、第1の前腕および第1のエンドエフェクタを備えた第1のロボットアームを提供することと、第2の上腕、第2の前腕および第2のエンドエフェクタを備えた第2のロボットアームを提供することと、前記第1の上腕を第1の回転軸において駆動装置に接続することと、前記第2の上腕を前記第1の回転軸から離間された第2の回転軸において前記駆動装置に接続することと、を含む。前記第1および第2のロボットアームは、前記第1および第2のエンドエフェクタを、これらのエンドエフェクタ上に配置された複数の基板を少なくとも部分的に上下に積み重ねるために第1の収縮位置にセットするように構成され、前記第1および第2のロボットアームは、前記第1の収縮位置から、少なくとも部分的に直接上下に位置する平行な第1の経路に沿う第1の方向に前記第1および第2のエンドエフェクタを伸長させるように回転されるように構成され、前記第1および第2のロボットアームは、上下に位置していない、互いから離間された第2の経路に沿う少なくとも1つの第2の方向に前記第1および第2のエンドエフェクタを伸長させるように回転されるように構成される。前記第1および第2のエンドエフェクタを伸長させるように前記第1および第2のロボットアームを回転させるために、また前記第1および第2の回転軸から離間された第3の回転軸の周りで前記第1および第2のロボットアームを回転させるために、前記駆動装置は3つのみのモータを備える。
【0010】
例示的実施形態の別の態様では、装置は、第1の上腕、第1の前腕および第1のエンドエフェクタを備えた第1のロボットアームと、第2の上腕、第2の前腕および第2のエンドエフェクタを備えた第2のロボットアームと、前記第1および第2のロボットアームに接続された駆動装置と、を備える。前記第1の上腕は、第1の回転軸において前記駆動装置に接続される。前記第2の上腕は、前記第1の回転軸から離間された第2の回転軸において前記駆動装置に接続される。前記第1および第2の上腕を回転させるために、前記駆動装置は5つのモータを備える。前記モータのうちの第1のモータは、前記第1および第2のロボットアームに接続されて、前記第1および第2の回転軸から離間された第3の回転軸の周りで前記第1および第2のロボットアームを回転させ、第2および第3のモータは、前記第1のロボットアームに接続されて、それぞれが前記第1の上腕および前記第1の前腕を回転させ、第4および第5のモータは、前記第2のロボットアームに接続されて、前記第1のロボットアームとは独立してそれぞれが前記第2の上腕および前記第2の前腕を回転させる。前記第1および第2のロボットアームは、前記第1および第2のエンドエフェクタを、これらのエンドエフェクタ上に配置された複数の基板を少なくとも部分的に上下に積み重ねるために第1の収縮位置にセットするように構成され、前記第1および第2のロボットアームは、前記第1の収縮位置から、少なくとも部分的に直接上下に位置する平行な第1の経路に沿う第1の方向に前記第1および第2のエンドエフェクタを伸長させるように構成され、前記第1および第2のロボットアームは、上下に位置していない、互いから離間された第2の経路に沿う少なくとも1つの第2の方向に前記第1および第2のエンドエフェクタを伸長させるように構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
14日前
株式会社クレスコ
補助吸着具
7日前
株式会社エビス
腰ベルト用連結具
14日前
個人
深孔スリーブ駆動ロッド構造
27日前
工機ホールディングス株式会社
作業機
22日前
個人
バール
27日前
梅馨堂合同会社
人協働ロボットシステム
29日前
株式会社イノウ
給油口キャップ用開閉具
今日
株式会社不二越
垂直多関節ロボット
今日
アイホン株式会社
ネジ締めカウントシステム
1日前
株式会社デンソーウェーブ
ロボット制御システム
20日前
パナソニック株式会社
工具
今日
パナソニック株式会社
工具
今日
学校法人法政大学
装着型アシスト装置
24日前
アピュアン株式会社
エアー式衝撃工具
17日前
三菱電機株式会社
トルク締め個所検出システム
27日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
インパクト工具
15日前
株式会社マキタ
インパクト工具
15日前
高丸工業株式会社
ロボット操作システムの動作方法
27日前
中国電力株式会社
電動ドライバー
21日前
SB C&S株式会社
治具セット
14日前
株式会社不二越
ロボットの教示システム及び教示方法
21日前
オムロン株式会社
モバイルロボット
21日前
オムロン株式会社
モバイルロボット
21日前
JUKI株式会社
ハンドリング装置
29日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
17日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
21日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
21日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
21日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
21日前
シナノケンシ株式会社
把持装置
21日前
株式会社星野商店
塗装ロボット用保護カバー
今日
東京ロボティクス株式会社
物体操作方法、ロボット及びプログラム
27日前
セイコーエプソン株式会社
ロボット、及びロボットシステム
17日前
株式会社デンソーウェーブ
段積みシステムおよび段積み方法
23日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ