TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025070474
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180805
出願日
2023-10-20
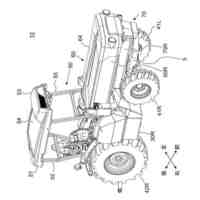
発明の名称
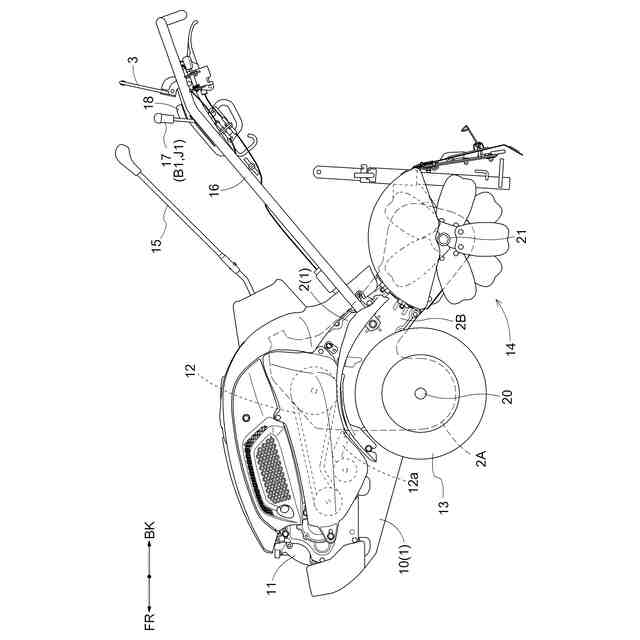
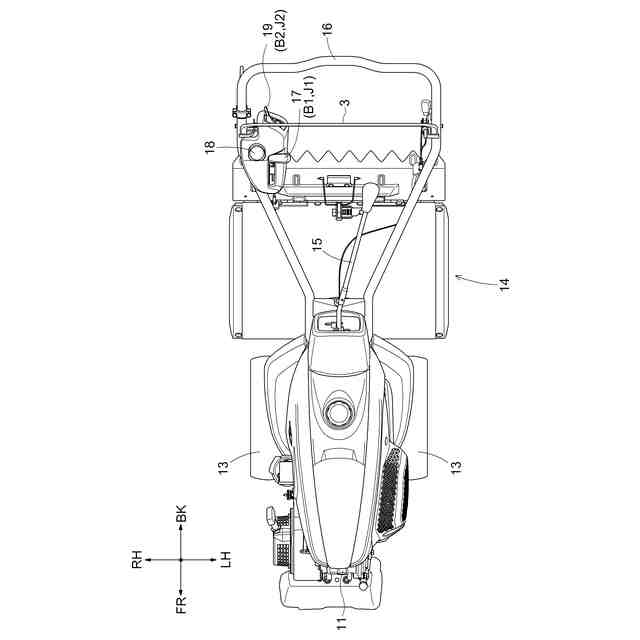
歩行型作業機
出願人
株式会社クボタ
,
日本フレックス工業株式会社
代理人
弁理士法人R&C
主分類
A01B
33/08 20060101AFI20250424BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】旋回時の操縦、および旋回後の直進時の操縦をし易くすると共に操作を簡略化した歩行型作業機を提供する。
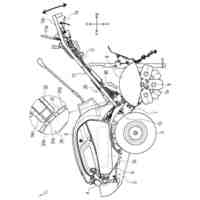
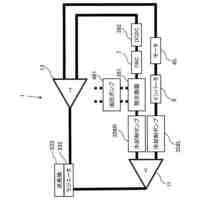
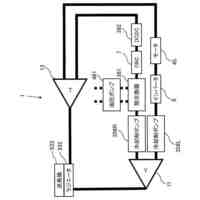
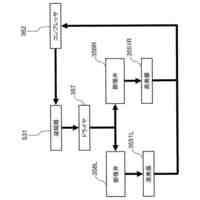
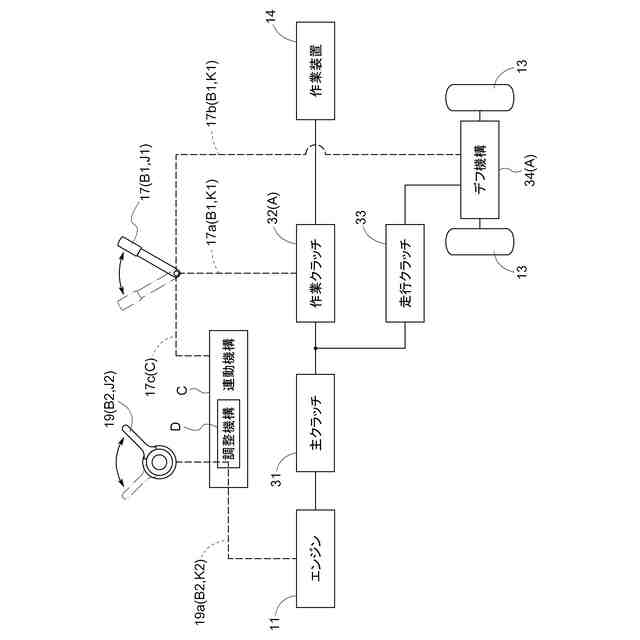
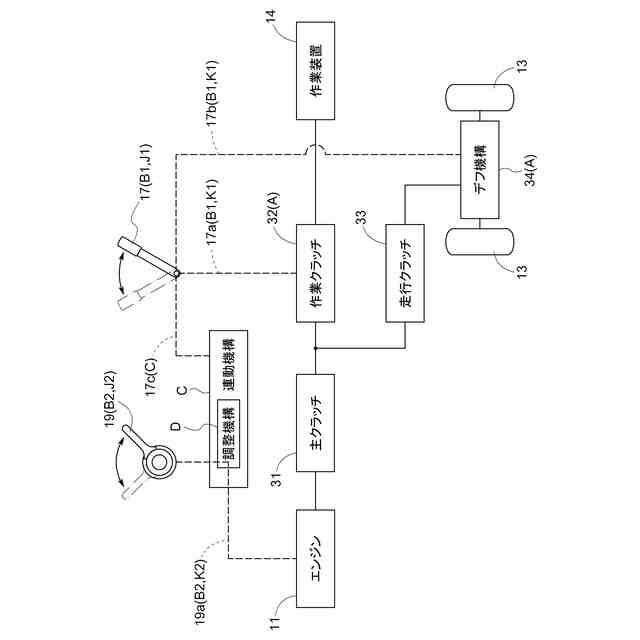
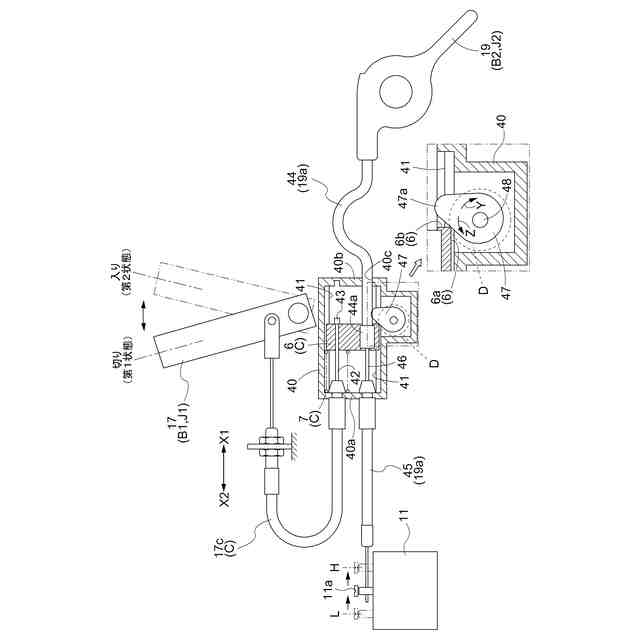
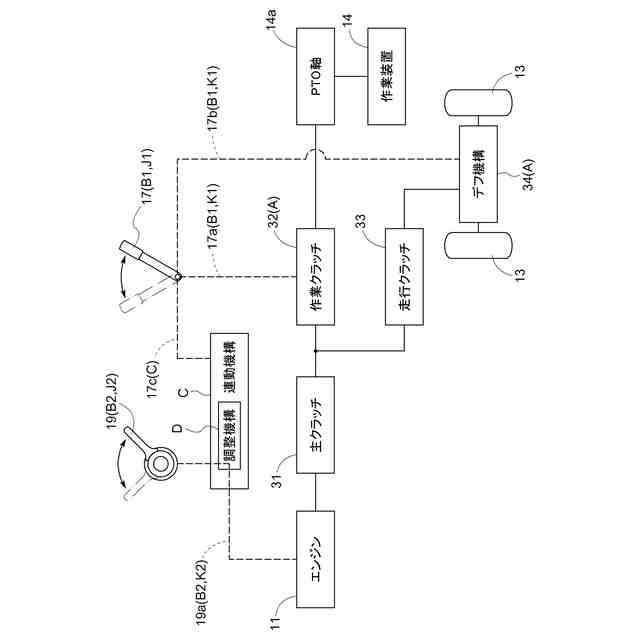
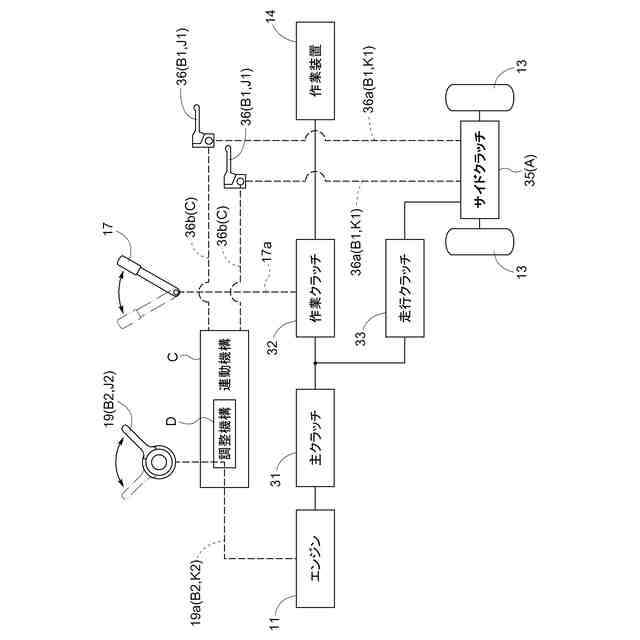
【解決手段】旋回の際に第1状態から第2状態へ操作され、直進の際に第2状態から第1状態に操作され、受け付けた操作を被操作装置Aへ伝達する第1操作機構B1を備えている。エンジン回転数の上昇操作及び下降操作を受け付けてエンジン11へ伝達する第2操作機構B2を備えている。第1操作機構B1と第2操作機構B2とを連動させ、第1操作機構B1が第2状態へ操作されたことに応じて第2操作機構B2を下降操作された状態へ変更し、第1操作機構B1が第1状態へ操作されたことに応じて第2操作機構B2を上昇操作された状態へ変更する連動機構Cを備えている。第2操作機構B2を上昇操作された状態へ変更する際に、第2操作機構B2の上昇操作された状態への変更を遅延させる調整機構Dを備えている。
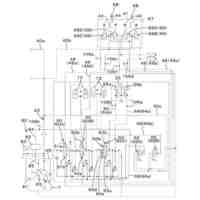
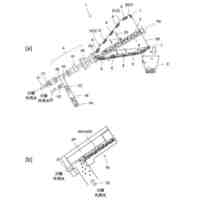
【選択図】図3
特許請求の範囲
【請求項1】
エンジンと、
被操作装置と、
旋回の際に第1状態から第2状態へ操作されると共に受け付けた操作を機械的に前記被操作装置へ伝達し、直進の際に前記第2状態から前記第1状態へ操作されると共に受け付けた操作を機械的に前記被操作装置へ伝達する第1操作機構と、
前記エンジンの回転数の上昇操作及び下降操作を受け付けると共に受け付けた操作を機械的に前記エンジンへ伝達する第2操作機構と、
前記第1操作機構と前記第2操作機構とを機械的に連動させる連動機構と、
前記第2操作機構に作用する調整機構と、が備えられ、
前記連動機構は、前記第1操作機構が前記第2状態へ操作されたことに応じて前記第2操作機構を前記下降操作された状態へ変更し、前記第1操作機構が前記第1状態へ操作されたことに応じて前記第2操作機構を前記上昇操作された状態へ変更し、
前記調整機構は、前記連動機構が前記第2操作機構を前記上昇操作された状態へ変更する際に、前記第2操作機構の前記上昇操作された状態への変更を遅延させる歩行型作業機。
続きを表示(約 1,700 文字)
【請求項2】
前記調整機構は、前記第2操作機構に連動されたダンパーである請求項1に記載の歩行型作業機。
【請求項3】
前記ダンパーは、ロータリダンパーである請求項2に記載の歩行型作業機。
【請求項4】
前記第1操作機構は、人為操作される第1人為操作具と、前記第1人為操作具が受け付けた操作を前記被操作装置へ伝達する第1伝達機構と、を備え、
前記第2操作機構は、人為操作される第2人為操作具と、前記第2人為操作具が受け付けた操作を前記エンジンへ伝達する第2伝達機構と、を備え、
前記連動機構は、前記第1人為操作具と前記第2伝達機構とを機械的に連動させる請求項1に記載の歩行型作業機。
【請求項5】
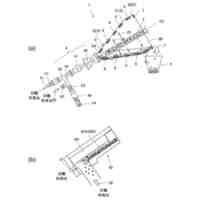
前記第2伝達機構は、インナーワイヤおよびアウタワイヤを有する操作ワイヤであり、
前記連動機構は、前記アウタワイヤの端部をスライド可能に保持するアウタ受け部材と、前記アウタ受け部材を前記第1人為操作具に連動連結する操作具連動機構と、を備えている請求項4に記載の歩行型作業機。
【請求項6】
前記第2伝達機構は、インナーワイヤおよびアウタワイヤを有する操作ワイヤであり、
前記連動機構は、前記アウタワイヤの端部をスライド可能に保持するアウタ受け部材と、前記アウタ受け部材を前記第1人為操作具に連動連結する操作具連動機構と、を備え、
前記調整機構は、前記アウタ受け部材に作用するダンパーである請求項4に記載の歩行型作業機。
【請求項7】
PTO軸又は作業装置への動力伝達を入切する、前記被操作装置としての作業クラッチと、
前記エンジンから前記作業クラッチへの動力伝達を入切する主クラッチと、を備え、
前記作業クラッチは、前記第1操作機構が前記第1状態への操作を受け付けたことに応じて動力伝達を入りにし、前記第1操作機構が前記第2状態への操作を受け付けたことに応じて動力伝達を切りにするように構成されている請求項1に記載の歩行型作業機。
【請求項8】
左右の走行装置と、
左右の前記走行装置の差動を規制可能である、前記被操作装置としてのデフ機構と、が備えられ、
前記デフ機構は、前記第1操作機構が前記第1状態への操作を受け付けたことに応じて差動を規制する状態になり、前記第1操作機構が前記第2状態への操作を受け付けたことに応じて差動を規制しない状態になるように構成されている請求項1に記載の歩行型作業機。
【請求項9】
左右の走行装置と、
左右の前記走行装置への動力伝達を入切する、前記被操作装置としてのサイドクラッチと、が備えられ、
前記サイドクラッチは、前記第1操作機構が前記第1状態への操作を受け付けたことに応じて動力伝達を入りにし、前記第1操作機構が前記第2状態への操作を受け付けたことに応じて動力伝達を切りにするように構成されている請求項1に記載の歩行型作業機。
【請求項10】
1つの前記第1操作機構と、
PTO軸又は作業装置への動力伝達を入切する、前記被操作装置としての作業クラッチと、
前記エンジンから前記作業クラッチへの動力伝達を入切する主クラッチと、
左右の走行装置と、
左右の前記走行装置の差動を規制可能である、前記被操作装置としてのデフ機構と、が備えられ、
前記作業クラッチは、前記第1操作機構が前記第1状態への操作を受け付けたことに応じて動力伝達を入りにし、前記第1操作機構が前記第2状態への操作を受け付けたことに応じて動力伝達を切りにするように構成され、
前記デフ機構は、前記第1操作機構が前記第1状態への操作を受け付けたことに応じて差動を規制する状態になり、前記第1操作機構が前記第2状態への操作を受け付けたことに応じて差動を規制しない状態になるように構成されている請求項1から6のいずれか一項に記載の歩行型作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、歩行型作業機に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、歩行型管理機が開示されている。オペレータは、操縦ハンドルを持って歩行型管理機を操縦すると共に、走行する歩行型管理機と共に歩行する。操縦ハンドルの右側に、作業クラッチを入切操作するための作業クラッチレバーが設けられている。
【先行技術文献】
【特許文献】
【0003】
特開2019-4843号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圃場にて歩行型管理機により農作業が行われる際、直進と旋回とが交互に行われる。例えば、オペレータが、圃場の長辺に平行に歩行型管理機を直進させながら耕耘作業を行う。圃場の端に到達すると、オペレータは、次の畝の作業を行うために、歩行型管理機を旋回させる。その際、オペレータは、作業クラッチレバーを操作して作業クラッチを切り、耕耘装置を停止させる。旋回を終えると、オペレータは、直進させながらの耕耘作業を行うために、作業クラッチレバーを操作して作業クラッチを入りにし、耕耘装置を駆動させる。
【0005】
直進しながら耕耘作業を行うときには、出力を高めるために、エンジンは回転数が高い状態となる。従って、走行の速度も高くなる。一方、旋回の際には走行の速度が低い方が操縦し易い。スロットルレバーによりエンジンの回転数を操作することができる。しかし、旋回の際に作業クラッチレバーとスロットルレバーの両方を操作するのは煩雑である。旋回を終えて直進する際も同様である。この点で、従来の歩行型管理機には改善の余地がある。
【0006】
本発明の目的は、旋回時の操縦、および旋回後の直進時における操縦をし易くすると共に操作を簡略化した歩行型作業機を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決する手段として、本発明の歩行型作業機は、
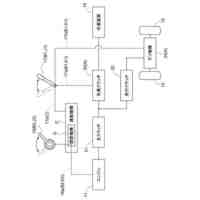
エンジンと、被操作装置と、旋回の際に第1状態から第2状態へ操作されると共に受け付けた操作を機械的に前記被操作装置へ伝達し、直進の際に前記第2状態から前記第1状態へ操作されると共に受け付けた操作を機械的に前記被操作装置へ伝達する第1操作機構と、前記エンジンの回転数の上昇操作及び下降操作を受け付けると共に受け付けた操作を機械的に前記エンジンへ伝達する第2操作機構と、前記第1操作機構と前記第2操作機構とを機械的に連動させる連動機構と、前記第2操作機構に作用する調整機構と、が備えられ、前記連動機構は、前記第1操作機構が前記第2状態へ操作されたことに応じて前記第2操作機構を前記下降操作された状態へ変更し、前記第1操作機構が前記第1状態へ操作されたことに応じて前記第2操作機構を前記上昇操作された状態へ変更し、前記調整機構は、前記連動機構が前記第2操作機構を前記上昇操作された状態へ変更する際に、前記第2操作機構の前記上昇操作された状態への変更を遅延させる。
【0008】
上記の特徴によれば、第1操作機構が第2状態へ操作されると、その操作が被操作装置へ伝達されると共に、第2操作機構が下降操作された状態へ変更されるので、エンジンの回転数が下降する。従って、旋回時にエンジン回転数の操作を行う必要がなく、エンジンの回転数が低下して旋回がし易くなる。すなわち、旋回時の操縦がし易くなると共に操作が簡略化される。
第1操作機構が第1状態へ操作されると、その操作が被操作装置へ伝達されると共に、第2操作機構が上昇操作された状態へ変更されるので、エンジンの回転数が上昇する。第2操作機構の上昇操作された状態への変更が遅延されるので、エンジンの回転数の上昇が漸次に行われる。従って、旋回後の直進時にエンジン回転数の復帰操作を行う必要がなく、かつ、エンジンの回転数が自動的に漸次に上昇して走行速度が直ちに高くならずに徐々に高くになる。すなわち、旋回後の直進時の操縦がし易くなると共に操作が簡略化される。
【0009】
また上記の特徴によれば、第1操作機構と第2操作機構とが機械的に連動されるので、高価な電子部品等が不要となり、歩行型作業機の製造コストの増加を抑制しつつ、旋回時のエンジンの回転数の下降が確実に実現され好ましい。
【0010】
本発明において、
前記調整機構は、前記第2操作機構に連動されたダンパーであると好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
カバー
26日前
株式会社クボタ
作業機
23日前
株式会社クボタ
作業車
26日前
株式会社クボタ
作業車
2日前
株式会社クボタ
作業車
2日前
株式会社クボタ
作業車
26日前
株式会社クボタ
作業車
16日前
株式会社クボタケミックス
配管構造
5日前
株式会社クボタ
比重分離装置
1か月前
株式会社クボタ
歩行型作業機
1日前
株式会社クボタ
比重分離装置
1か月前
株式会社クボタ
比重分離装置
1か月前
株式会社クボタ
歩行型作業機
1日前
株式会社クボタ
歩行型作業機
1日前
株式会社クボタ
歩行型作業機
1日前
株式会社クボタ
比重分離装置
1か月前
株式会社クボタ
麺または麺生地
11日前
株式会社クボタ
農業管理システム
23日前
株式会社クボタ
農業管理システム
23日前
株式会社クボタ
パンまたはパン生地
11日前
株式会社クボタ
パンまたはパン生地
11日前
株式会社クボタ
米ペーストの製造方法
11日前
株式会社クボタ
電気車両の液冷システム
9日前
株式会社クボタ
電気車両の液冷システム
3日前
株式会社クボタ
電気車両の空冷システム
3日前
株式会社クボタ
電気車両の空冷システム
3日前
株式会社クボタ
電気車両の液冷システム
9日前
株式会社クボタ
電気車両の空冷システム
9日前
株式会社クボタ
電気車両の空冷システム
9日前
株式会社クボタ
電気車両の空冷システム
9日前
株式会社クボタ
フロントローダ及び作業車両
16日前
株式会社クボタケミックス
差口付き管継手および変換継手
5日前
株式会社クボタ
車両のための電動モータ支持装置
9日前
株式会社クボタ
電気車両のための緊急停止スイッチ
9日前
株式会社クボタ
管支持装置及び管支持装置の設置方法
16日前
株式会社クボタ
サイド電池ハウジングを備えた作業車両
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ