TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071975
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2023182435
出願日
2023-10-24
発明の名称
走行制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/02 20120101AFI20250430BHJP(車両一般)
要約
【課題】カーブ走行時の減速制御を行う走行制御装置であって、車両の後方に後続車両がある場合にも、自車両及び後続車両の運転者が不安感を覚える虞を低減することができるよう改良された走行制御装置を提供する。
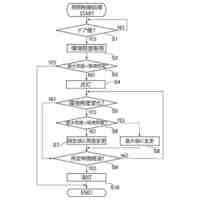
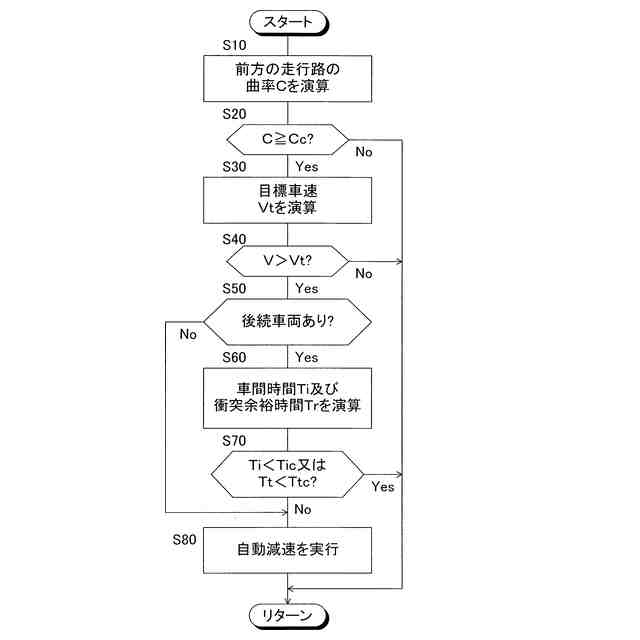
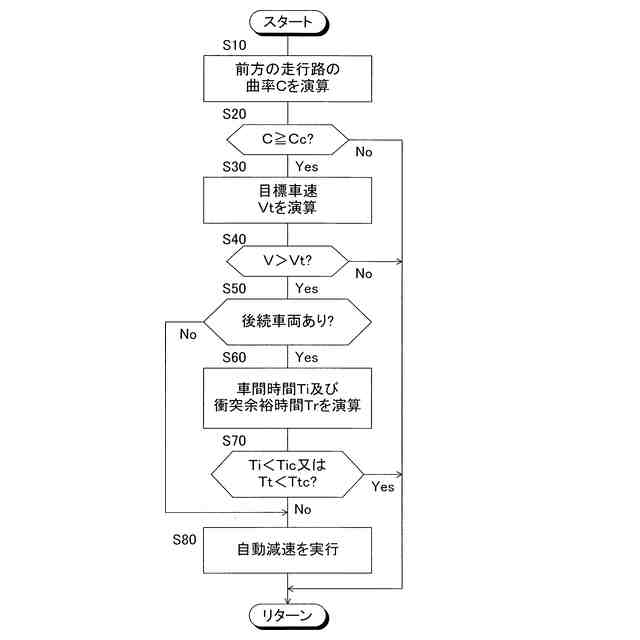
【解決手段】自車両を自動的に制動する自動制動装置と、自車両の前方の走行路の曲率の情報を取得し(S10)、走行路の曲率に基づいて自車両の目標車速Vtを演算し(S30)、自車両の車速Vが目標車速を超えているときには(S40)、自車両の車速が目標車速になるように自動制動装置による自車両の自動減速を行う(S80)よう構成された運転支援ECUと、を含む走行制御装置であって、運転支援ECUは、自車両の後方の情報を取得し、自車両の後方に後続車両があるときには(S50)、自車両と後続車両との間の車間時間Tiを演算し(S60)、車間時間が基準値Tic未満であるときには、自車両の自動減速を行わない(S70)。
【選択図】図2
特許請求の範囲
【請求項1】
自車両を自動的に制動する自動制動装置と、自車両の前方の走行路の曲率の情報を取得し、前記走行路の曲率に基づいて自車両の目標車速を演算し、自車両の車速が前記目標車速を超えているときには、自車両の車速が前記目標車速になるように前記自動制動装置による自車両の自動減速を行うよう構成された制御ユニットと、を含む走行制御装置において、
前記制御ユニットは、自車両の後方の情報を取得し、自車両の後方に後続車両があるときには、自車両と前記後続車両との間の車間時間を演算し、前記車間時間が基準値未満であるときには、前記自車両の自動減速を行わないよう構成された、走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、カーブ走行時の減速制御を行う、自動車などの車両のための走行制御装置に係る。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
自動車などの車両のための走行制御装置の一つとして、カーブ走行時の減速制御を行う走行制御装置が知られている。カーブ走行時の減速制御においては、車両の前方の走行路の曲率に基づいて車両の目標車速が演算され、車両の車速が目標車速を超えているときには、車両の車速が目標車速になるように自動制動により車両が減速される。
【0003】
例えば、下記の特許文献1には、車両の車速がカーブについて規定された車速を超えているときには、自動制動により車両を減速するに当たり、走行制御により設定された制御車速が高いほど、カーブ走行時の車速が高くなるように車両を減速するよう構成された走行制御装置が記載されている。この種の走行制御装置によれば、カーブ走行時の車速が過剰にならないよう運転支援することができる。
【先行技術文献】
【特許文献】
【0004】
特許第7104649号明細書
【発明の概要】
【0005】
〔発明が解決しようとする課題〕
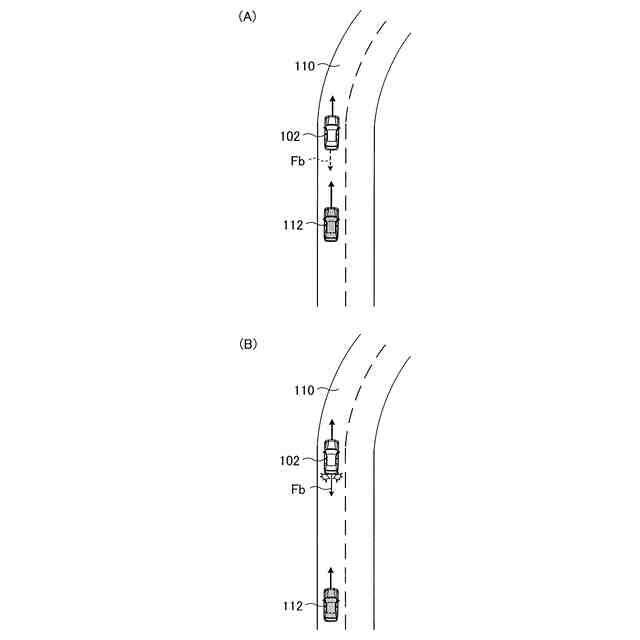
しかし、上記特許文献1に記載された装置のような従来の走行制御装置においては、車両の車速が目標車速を超えているときには、車両の減速が車両の後方に与える影響が考慮されることなく自動制動により車両が減速される。そのため、車両の後方に後続車両があり、自車両と後続車両との間の車間距離、特に車間時間が小さい状況にて自車両が減速されると、自車両及び後続車両が自車両の減速により過剰に接近し、自車両及び後続車両の運転者が不安感を覚える虞がある。
【0006】
本発明は、カーブ走行時の減速制御を行う走行制御装置であって、車両の後方に後続車両がある場合にも、自車両及び後続車両の運転者が不安感を覚える虞を低減することができるよう改良された走行制御装置を提供する。
〔課題を解決するための手段及び発明の効果〕
【0007】
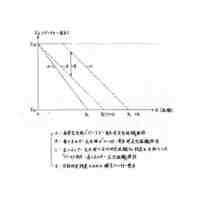
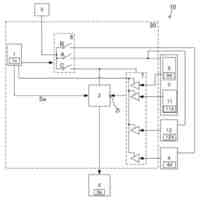
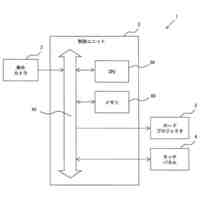
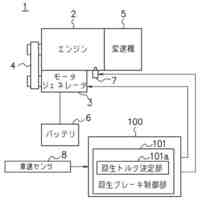
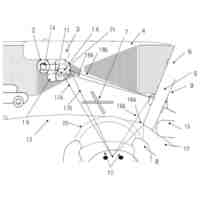
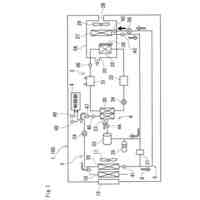
本発明によれば、自車両(102)を自動的に制動する自動制動装置(36)と、自車両の前方の走行路の曲率の情報を取得し(S10)、走行路の曲率に基づいて自車両の目標車速(Vt)を演算し(S30)、自車両の車速(V)が目標車速を超えているときには(S40)、自車両の車速が目標車速になるように自動制動装置による自車両の自動減速を行う(S80)よう構成された制御ユニット(運転支援ECU10)と、を含む走行制御装置(100)が提供される。
【0008】
制御ユニット(運転支援ECU10)は、自車両の後方の情報を取得し、自車両の後方に後続車両があるときには(S50)、自車両と後続車両との間の車間時間(Ti)を演算し(S60)、車間時間が基準値(Tic)未満であるときには、自車両の自動減速を行わない(S70)よう構成される。
【0009】
上記の構成によれば、自車両の前方の走行路の曲率の情報が取得され、走行路の曲率に基づいて自車両の目標車速が演算され、自車両の車速が目標車速を超えているときには、自車両の車速が目標車速になるように自動制動装置による自車両の減速が行われる。更に、自車両の後方の情報が取得され、自車両の後方に後続車両があるときには、自車両と後続車両との間の車間時間が演算され、車間時間が基準値未満であるときには、自動制動装置による自車両の減速は行われない。
【0010】
従って、自車両の後方に後続車両があり、自車両と後続車両との間の車間時間が基準値未満であるときには、自車両は減速されない。よって、自車両及び後続車両が自車両の減速により過剰に接近することに起因して自車両及び後続車両の運転者が不安感を覚える虞を低減することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
2か月前
個人
警告装置
23日前
個人
小型EVシステム
25日前
日本精機株式会社
ケース
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
照明装置
1か月前
個人
ブレーキシステム
1か月前
株式会社松華
懸架装置
1か月前
個人
自走式立体型洗車場
1か月前
個人
自動車ドア開度規制ベルト
24日前
個人
ステージカー
1か月前
横浜ゴム株式会社
タイヤ
1か月前
井関農機株式会社
作業車両
1か月前
株式会社ユーシン
照明装置
7日前
日本精機株式会社
車両用照明装置
2か月前
マツダ株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社ユーシン
照明装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
2か月前
帝国繊維株式会社
作業車両
1か月前
井関農機株式会社
作業車両
7日前
コイト電工株式会社
座席装置
1か月前
スズキ株式会社
車両制御装置
1か月前
個人
農業機械への架線給電システム
1か月前
エムケー精工株式会社
車両処理装置
1か月前
ダイハツ工業株式会社
車両構造
2か月前
個人
Aピラー死角エリヤ確認用ミラー
2か月前
ダイハツ工業株式会社
車両構造
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ