TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025077980
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2024122420
出願日
2024-07-29
発明の名称
コンピュータビジョンの方法およびシステム
出願人
株式会社東芝
代理人
弁理士法人鈴榮特許綜合事務所
主分類
G06T
7/00 20170101AFI20250512BHJP(計算;計数)
要約
【課題】オブジェクトの3次元再構成を生成するためのコンピュータビジョンの方法を提供する。
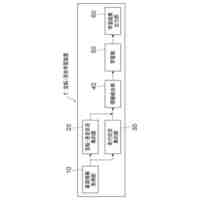
【解決手段】方法は、オブジェクトの少なくとも1つの推定形状を受信することと、少なくとも1つの推定形状が、複数の点光源を使用して対応する視線方向からの1つまたは複数の画像のキャプチャに基づいて生成されるオブジェクトの少なくとも1つの推定形状を第1のニューラルネットワークへの入力として提供することと、オブジェクトの表面上の複数の点を識別するために、第1のニューラルネットワークを使用して対応する視線方向に沿って1つまたは複数の点をサンプリングすることと、識別した複数の点の各点をレンダリングし、オブジェクトの3次元再構成を生成することと、少なくとも1つの欠損を生成し、第1のニューラルネットワークを、少なくとも1つの欠損に少なくとも部分的に基づいてトレーニングすることと、を含む。
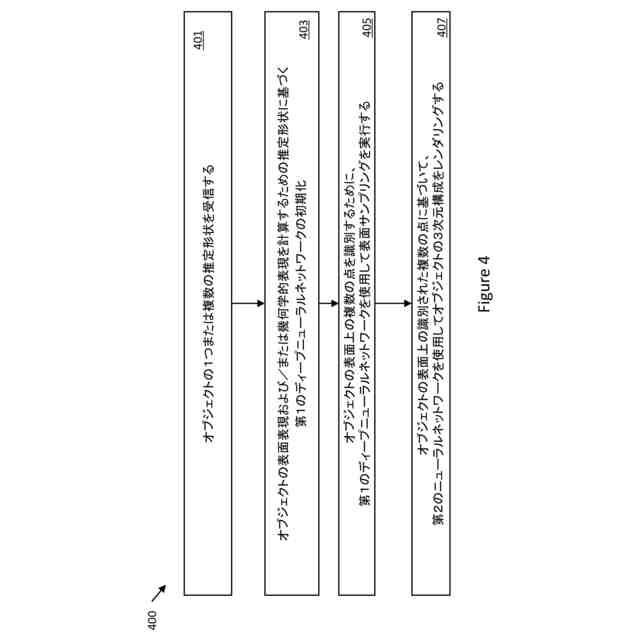
【選択図】図4
特許請求の範囲
【請求項1】
オブジェクトの3次元再構成を生成するためのコンピュータビジョンの方法であって、
オブジェクトの少なくとも1つの推定形状を受信することと、前記少なくとも1つの推定形状は、複数の点光源を使用して対応する視線方向からの1つまたは複数の画像のキャプチャに基づいて生成され、
前記オブジェクトの前記少なくとも1つの推定形状を第1のニューラルネットワークへの入力として提供することと、前記第1のニューラルネットワークは、前記オブジェクトの表現を計算するために初期化され、
前記第1のニューラルネットワークを使用して前記対応する視線方向に沿って1つまたは複数の点をサンプリングし、前記オブジェクトの表面上の複数の点を識別することと、
前記識別された複数の点の各点をレンダリングし、前記オブジェクトの3次元再構成を生成することと、を備え、ここにおいて、前記レンダリングすることは、少なくとも1つの欠損を生成し、前記第1のニューラルネットワークは、前記少なくとも1つの欠損に少なくとも部分的に基づいてトレーニングされる、コンピュータビジョンの方法。
続きを表示(約 880 文字)
【請求項2】
前記表現は、前記オブジェクトの表面表現である、請求項1に記載のコンピュータビジョンの方法。
【請求項3】
前記表現は、前記オブジェクトの3次元幾何学的表現である、請求項1に記載のコンピュータビジョンの方法。
【請求項4】
前記少なくとも1つの欠損の逆伝播を実行し、前記第1のニューラルネットワークの1つまたは複数の重みを調整することをさらに備える、請求項1に記載のコンピュータビジョンの方法。
【請求項5】
前記レンダリングすることは、第2のニューラルネットワークによって実装される、請求項1に記載のコンピュータビジョンの方法。
【請求項6】
前記少なくとも1つの欠損の逆伝播を実行し、前記第2のニューラルネットワークの1つまたは複数の重みを調整することをさらに備える、請求項5に記載のコンピュータビジョンの方法。
【請求項7】
前記第2のニューラルネットワークは、前記オブジェクトの材料を学習するようにさらに構成される、請求項5に記載のコンピュータビジョンの方法。
【請求項8】
前記レンダリングすることは、前記識別された複数の点の各点における表面法線および強度のうちの少なくとも1つをレンダリングすることを含む、請求項1に記載のコンピュータビジョンの方法。
【請求項9】
前記少なくとも1つの推定形状は、第3のニューラルネットワークを使用して生成される、請求項1に記載のコンピュータビジョンの方法。
【請求項10】
前記少なくとも1つの推定形状を受信することは、第1の推定形状および第2の推定形状を受信することを含み、前記第1の推定形状は、第1の視線方向からキャプチャされた複数の画像の第1のセットに基づいて生成され、前記第2の推定形状は、第2の視線方向からキャプチャされた複数の画像の第2のセットに基づいて生成される、請求項1に記載のコンピュータビジョンの方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、コンピュータビジョンの方法およびシステムに関する。特に、本開示は、オブジェクトの3次元再構成を実行することに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
コンピュータビジョンタスクは、画像データの取得、分析、および処理などのタスクを含む。いくつかのコンピュータビジョンシステムは、これらのタスクを実行することによってオブジェクトの3次元再構成を実行することができる。しかしながら、照度差ステレオは、コンピュータビジョンにおける古典的な問題である。照度差ステレオは、オブジェクトの表面法線、オブジェクトの深度などの局所的な幾何学的特徴を推定するための技法である。照度差ステレオは、オブジェクト上の(たとえば、光源および観察者に対する)表面の向きと、表面によって反射される光量との間の関係を利用する。
【0003】
照度差ステレオは、オブジェクトから反射された光からオブジェクトの3次元形状を取り出すことを伴い得る。これは、特に、反射のタイプおよび材料特性(たとえば、オブジェクトの材料特性)へのその非線形依存性のために、しばしば困難であり得る。いくつかの既存の方法は、オブジェクトの形状を推定するために単一視線の照度差ステレオを使用する。そのような方法を使用して推定された3次元形状は、常に正確とは限らない。最近の進歩は、オブジェクトの3次元再構成に向かって行われてきたが、推定された形状の品質および実用性は、納得できるものではなかった。したがって、オブジェクトの正確な3次元再構成が必要である。加えて、カラーテクスチャまたは幾何学的特徴を有しないオブジェクトおよび/またはシーンの正確な3次元再構成についての満たされていない必要性が存在する。
【発明の概要】
【0004】
一態様では、オブジェクトの3次元再構成を生成するためのコンピュータビジョンの方法が提供され、本方法は、
オブジェクトの少なくとも1つの推定形状を受信することと、少なくとも1つの推定形状は、複数の点光源を使用して対応する視線方向からの1つまたは複数の画像のキャプチャに基づいて生成され、
オブジェクトの少なくとも1つの推定形状を第1のニューラルネットワークへの入力として提供することと、第1のニューラルネットワークは、オブジェクトの表現を計算するために初期化され、
第1のニューラルネットワークを使用して対応する視線方向に沿って1つまたは複数の点をサンプリングし、オブジェクトの表面上の複数の点を識別することと、
識別された複数の点の各点をレンダリングし、ブジェクトの3次元再構成を生成することと、を備え、ここにおいて、レンダリングすることは、少なくとも1つの欠損を生成し、第1のニューラルネットワークは、少なくとも1つの欠損に少なくとも部分的に基づいてトレーニングされる。
【0005】
一例では、表現は、オブジェクトの表面表現である。いくつかの変形形態では、オブジェクトの表面表現は、高さマップである。1つまたは複数の点をサンプリングすることは、高さマップをオブジェクトの少なくとも1つの推定形状にフィッティングすることを含み得る。いくつかの変形形態では、オブジェクトの表面表現は、ニューラル関数であり、ここにおいて、ニューラル関数は、第1のニューラルネットワークによって表現される。いくつかの変形形態では、オブジェクトの少なくとも1つの推定形状は、オブジェクトの少なくとも1つの推定される表面を備え、ここにおいて、第1のニューラルネットワークは、平面上の点をオブジェクトの表面からの高さにマッピングする。いくつかの変形形態では、第1のニューラルネットワークは、表面上の点をオブジェクトの表面深度にマッピングし得る。
【0006】
別の例では、表現は、オブジェクトの3次元幾何学的表現である。いくつかの変形形態では、オブジェクトの少なくとも1つの推定形状は、オブジェクトの少なくとも1つの推定される3次元ジオメトリを備え、ここにおいて、第1のニューラルネットワークは、3次元空間上の点をオブジェクト上の点の符号付き距離フィールドにマッピングする。本方法は、オブジェクトの計算された3次元幾何学的表現からオブジェクトの表面表現を計算することをさらに備え得る。いくつかの変形形態では、オブジェクトの3次元幾何学的表現は、ニューラル関数であり、ここにおいて、ニューラル関数は、第1のニューラルネットワークによって表現される。
【0007】
本方法は、少なくとも1つの欠損の逆伝播を実行し、第1のニューラルネットワークの1つまたは複数の重みを調整することをさらに備え得る。
【0008】
一例では、レンダリングすることは、第2のニューラルネットワークによって実装される。本方法は、少なくとも1つの欠損の逆伝播を実行し、第2のニューラルネットワークの1つまたは複数の重みを調整することをさらに備え得る。第2のニューラルネットワークは、オブジェクトの材料を学習するようにさらに構成される。
【0009】
一例では、レンダリングすることは、識別された複数の点の各点における表面法線および強度のうちの少なくとも1つをレンダリングすることをさらに備え得る。一例では、少なくとも1つの推定形状は、第3のニューラルネットワークを使用して生成される。
【0010】
一例では、少なくとも1つの推定形状を受信することは、第1の推定形状と第2の推定形状とを受信することを備え得、第1の推定形状は、第1の視線方向からキャプチャされた複数の画像の第1のセットに基づいて生成され、第2の推定形状は、第2の視線方向からキャプチャされた複数の画像の第2のセットに基づいて生成される。本方法は、第1の推定形状と第2の推定形状とを連結し、連結された推定形状を生成することと、第1のニューラルネットワークへの入力として連結された推定形状を提供することとをさらに備え得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
2日前
株式会社東芝
回転電機
28日前
株式会社東芝
回転電機
28日前
株式会社東芝
回転電機
28日前
株式会社東芝
発振回路
1か月前
株式会社東芝
真空バルブ
6日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
静止誘導電器
10日前
株式会社東芝
情報表示装置
28日前
株式会社東芝
スイッチギヤ
7日前
株式会社東芝
車両システム
6日前
株式会社東芝
静止誘導電器
8日前
株式会社東芝
配線支援装置
29日前
株式会社東芝
電力変換装置
21日前
株式会社東芝
電子計算機装置
29日前
株式会社東芝
光注入同期装置
1か月前
株式会社東芝
加速器システム
1か月前
株式会社東芝
粒子線治療装置
9日前
株式会社東芝
電池モジュール
20日前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
回転電機の回転子
28日前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
X線厚み測定装置
2日前
株式会社東芝
空転・滑走学習装置
7日前
株式会社東芝
紙葉類処理システム
1か月前
株式会社東芝
冷房能力指標推定装置
3日前
株式会社東芝
積層造形装置及び方法
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ