TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088353
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203016
出願日
2023-11-30
発明の名称
制御装置、運転支援方法、及びコンピュータプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250604BHJP(信号)
要約
【課題】ドライバに対して不要な運転支援を行ってしまうのを抑制する。
【解決手段】車両の運転支援を実施する制御装置5は、車両の周辺に存在する移動体が前記車両の周囲に設定される支援エリアに進入したことを検出し、移動体が支援エリアの前方から支援エリアに進入したときは、移動体の前端位置と、車両と、の位置関係に基づいて、又は、移動体と、車両ごとに設定されるアイリプス基準線と、の位置関係に基づいて、運転支援を実施するように構成される。
【選択図】図1
特許請求の範囲
【請求項1】
車両の周辺に存在する移動体が前記車両の周囲に設定される支援エリアに進入したことを検出し、
前記移動体が前記支援エリアの前方から前記支援エリアに進入したときは、前記移動体の前端位置と、前記車両と、の位置関係に基づいて、又は、前記移動体と、前記車両ごとに設定されるアイリプス基準線と、の位置関係に基づいて、運転支援を実施するように構成される、
制御装置。
続きを表示(約 830 文字)
【請求項2】
前記移動体の前端位置と、前記支援エリアの前端位置と、が同位置となったときに、運転支援を実施するように構成される、
請求項1に記載の制御装置。
【請求項3】
前記移動体が前記支援エリア内に収まったときに、運転支援を実施するように構成される、
請求項1に記載の制御装置。
【請求項4】
前記移動体の前端位置と、前記支援エリアの前端位置と、が同位置となったときに、前記移動体が前記支援エリア内に収まったと判定するように構成される、
請求項3に記載の制御装置。
【請求項5】
前記移動体の前端位置と、前記支援エリアの前端位置と、の車両前後方向の間隔が所定間隔以下となったときに、運転支援を実施するように構成される、
請求項1に記載の制御装置。
【請求項6】
前記支援エリアの前端位置は、前記車両の前端位置と同位置である、
請求項1から請求項5までのいずれか1項に記載の制御装置。
【請求項7】
前記支援エリアの前端は、前記車両の前端位置から、前記車両ごとに設定されるアイリプス基準線までの間に位置する、
請求項1から請求項5までのいずれか1項に記載の制御装置。
【請求項8】
前記移動体が前記アイリプス基準線上に位置しているときに、運転支援を実施するように構成される、
請求項1に記載の制御装置。
【請求項9】
前記移動体の前端位置と、前記前記アイリプス基準線と、が同位置となったときに、運転支援を実施するように構成される、
請求項1に記載の制御装置。
【請求項10】
前記移動体が前記アイリプス基準線よりも後方に位置しているときに、運転支援を実施するように構成される、
請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、運転支援方法、及びコンピュータプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、従来の注意喚起装置として、ドライバの死角領域となる警報エリア内を走行する他車両を検知し、ドライバに対して注意喚起を行うブラインドスポットモニタが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-26241号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述した従来の注意喚起装置では、自車両が他車両を追い抜く際に、他車両の後端部分が警報エリア内に入ると注意喚起が行われる。そのため、例えばトラックやバスなど、特に全長の長い他車両を追い抜く際に、ドライバが他車両を視認できているにもかかわらず、他車両の後端部分が警報エリア内に入ったために、ドライバに対して不要な注意喚起を行うおそれがあった。
【0005】
本発明は、このような問題点に着目してなされたものであり、ドライバに対して不要な運転支援を行ってしまうのを抑制することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様による制御装置は、車両の周辺に存在する移動体が車両の周囲に設定される支援エリアに進入したことを検出し、移動体が支援エリアの前方から支援エリアに進入したときは、移動体の前端位置と、車両と、の位置関係に基づいて、又は、移動体と、車両ごとに設定されるアイリプス基準線と、の位置関係に基づいて、運転支援を実施するように構成される。
【0007】
また、本発明のある態様による、車両の運転支援を実施する制御装置による運転支援方法は、車両の周辺に存在する移動体が車両の周囲に設定される支援エリアに進入したことを検出し、移動体が支援エリアの前方から支援エリアに進入したときは、移動体の前端位置と、車両と、の位置関係に基づいて、又は、移動体と、車両ごとに設定されるアイリプス基準線と。の位置関係に基づいて、運転支援を実施する。
運転支援方法。
【0008】
また、本発明のある態様によるコンピュータプログラムは、車両の周辺に存在する移動体が車両の周囲に設定される支援エリアに進入したことを検出し、移動体が支援エリアの前方から支援エリアに進入したときは、移動体の前端位置と、車両と、の位置関係に基づいて、又は、移動体と、車両ごとに設定されるアイリプス基準線と、の位置関係に基づいて、運転支援を実施する、処理をコンピュータに実行させる。
【発明の効果】
【0009】
本発明のこれらの態様によれば、移動体がどの程度自車両から視認できているのかを判断した上で運転支援を実施することができるので、自車両のドライバに対して不要な運転支援を行ってしまうのを抑制することができる。
【図面の簡単な説明】
【0010】
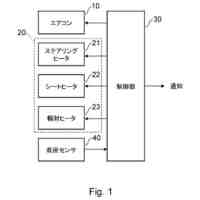
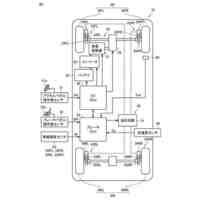
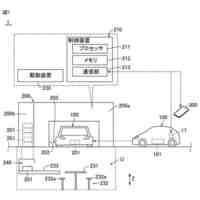
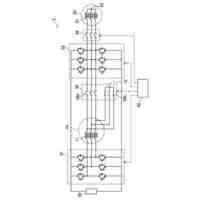
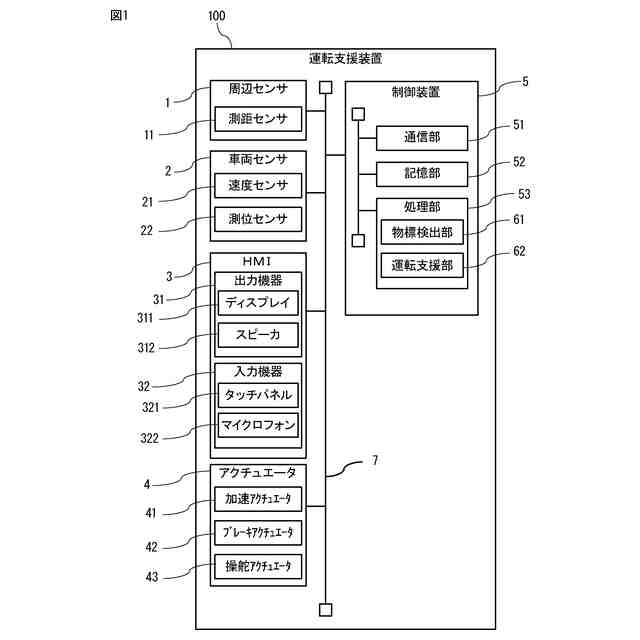
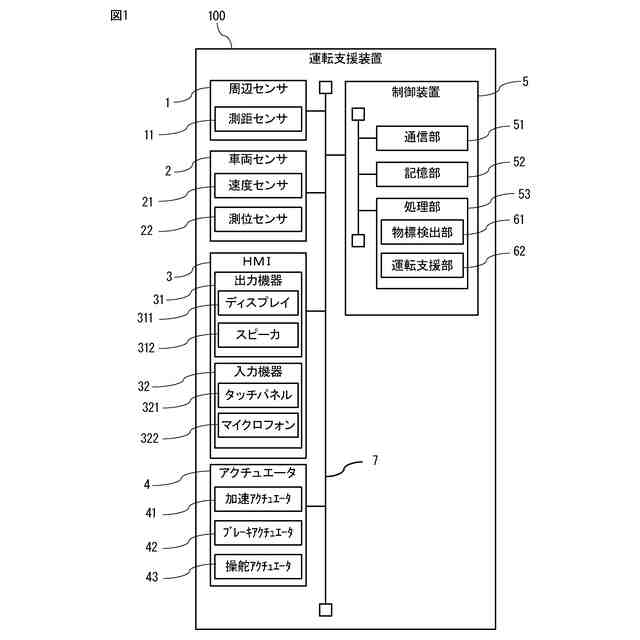
本発明の第1実施形態による運転支援装置の概略構成図である。
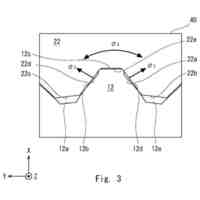
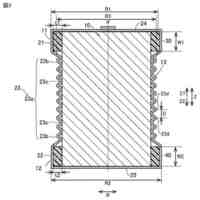
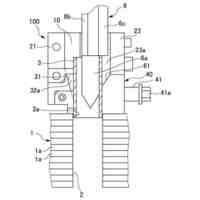
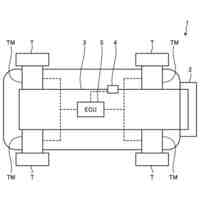
測距センサについて説明する図である。
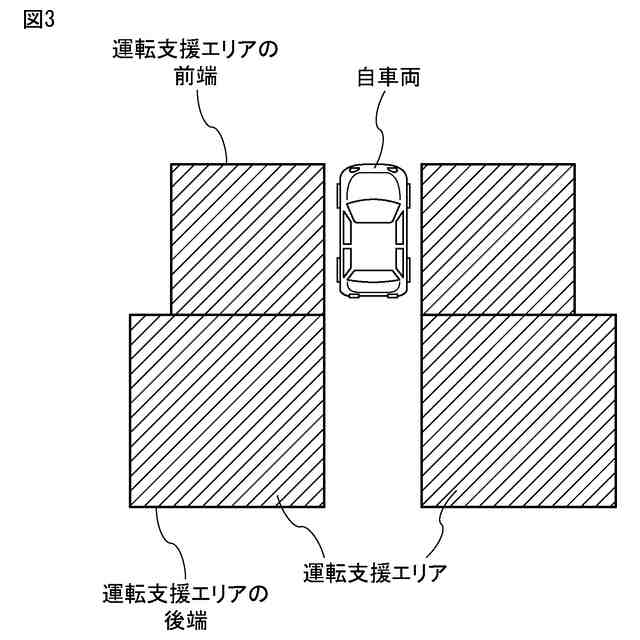
自車両の周囲に予め設定される運転支援エリアの一例を示す図である。
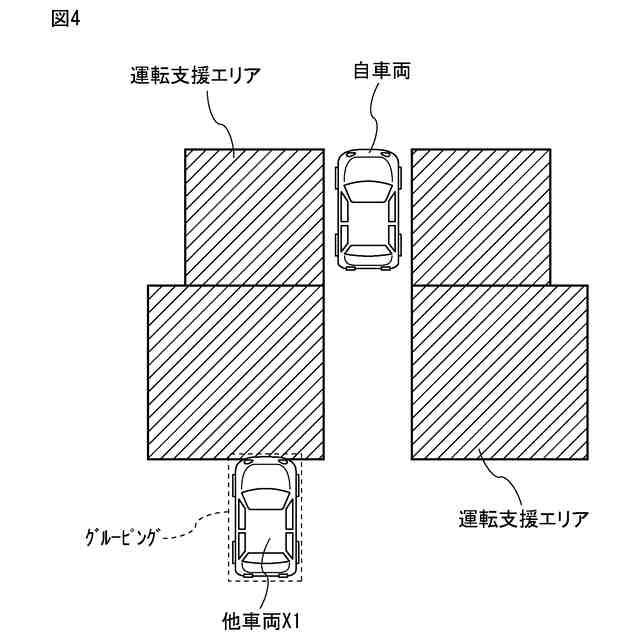
他車両が運転支援エリアの後方から運転支援エリアに進入してくるシーンの一例を示す図である。
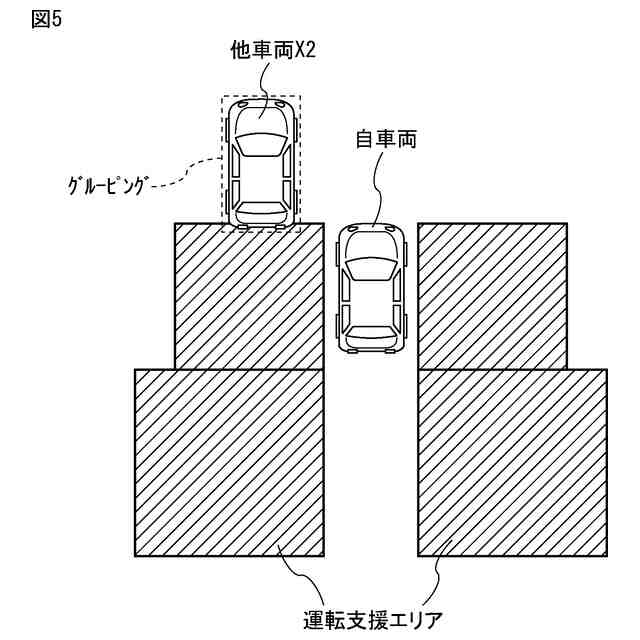
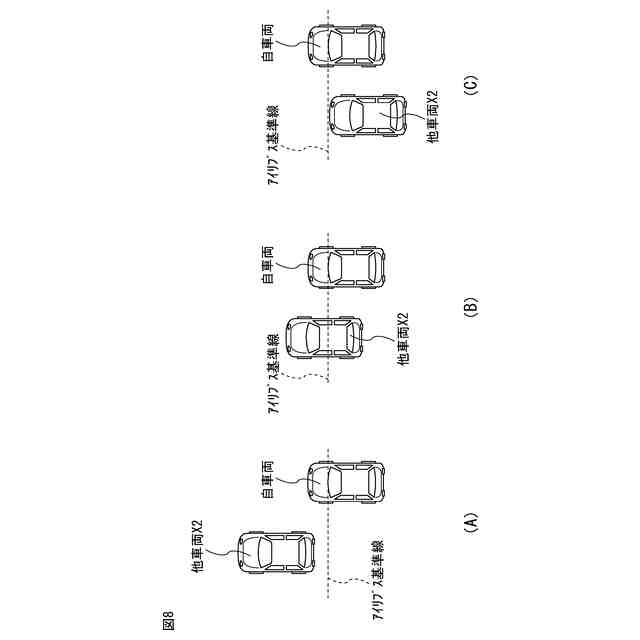
他車両が運転支援エリアの前方から運転支援エリアに進入してくるシーンの一例を示す図である。
運転支援エリアの前方から進入してきた他車両が、運転支援エリア内に収まっているシーンの一例を示す図である。
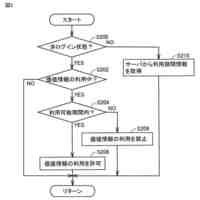
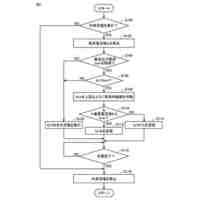
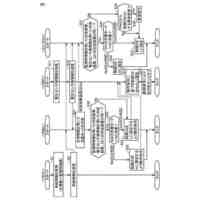
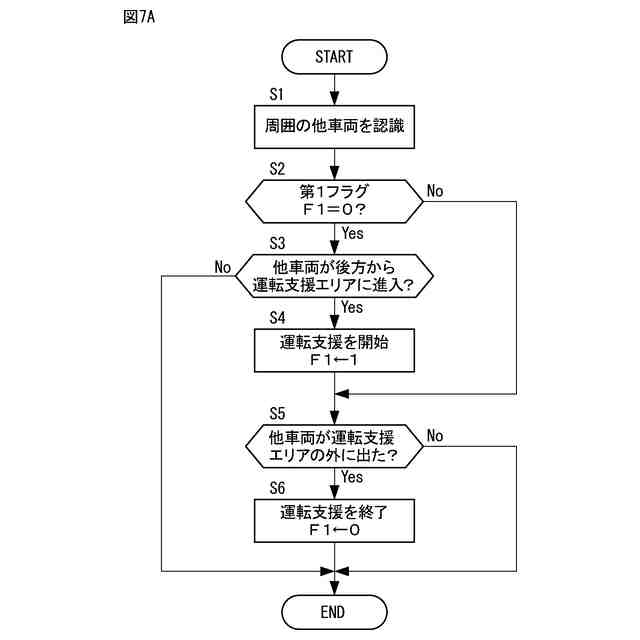
自車両の後方から運転支援エリアに進入してきた他車両に対する、本発明の第1実施形態による運転支援制御の詳細について説明するフローチャートである。
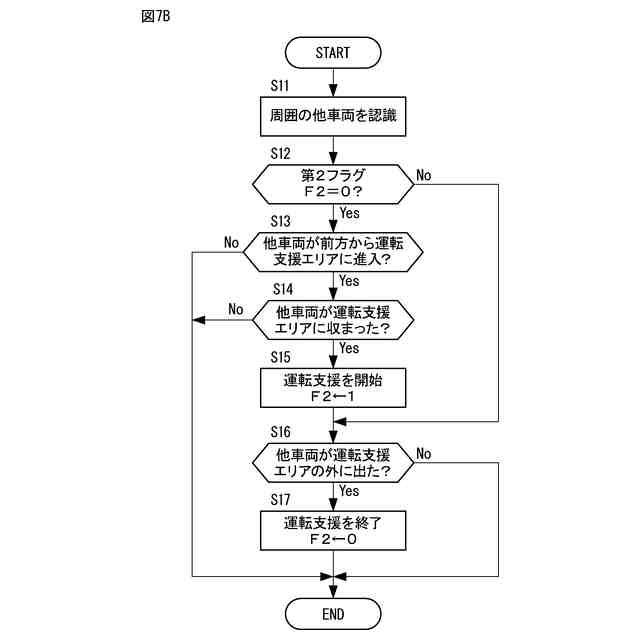
自車両の前方から運転支援エリアに進入してきた他車両に対する、本発明の第1実施形態による運転支援制御の詳細について説明するフローチャートである。
アイリプス基準線について説明する図である。
自車両の前方から運転支援エリアに進入してきた他車両に対する、本発明の第2実施形態による運転支援制御の詳細について説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
電池
3日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
端末
9日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
方法
10日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
モータ
2日前
トヨタ自動車株式会社
組電池
8日前
トヨタ自動車株式会社
組電池
9日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
軸部材
1日前
トヨタ自動車株式会社
自動車
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
操船装置
今日
トヨタ自動車株式会社
運搬車両
1日前
トヨタ自動車株式会社
駆動装置
2日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
挿入治具
2日前
トヨタ自動車株式会社
監視装置
今日
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
駆動装置
13日前
トヨタ自動車株式会社
冷却装置
8日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
空気軸受
7日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
内燃機関
13日前
トヨタ自動車株式会社
防曇装置
13日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
燃料電池
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ