TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096187
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2024210758
出願日
2024-12-03
発明の名称
接合方法、接合システムおよび製造方法
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
H01L
21/60 20060101AFI20250619BHJP(基本的電気素子)
要約
【課題】複数のチップを一括して接合することを含むチップを接合する接合方法を提供する。
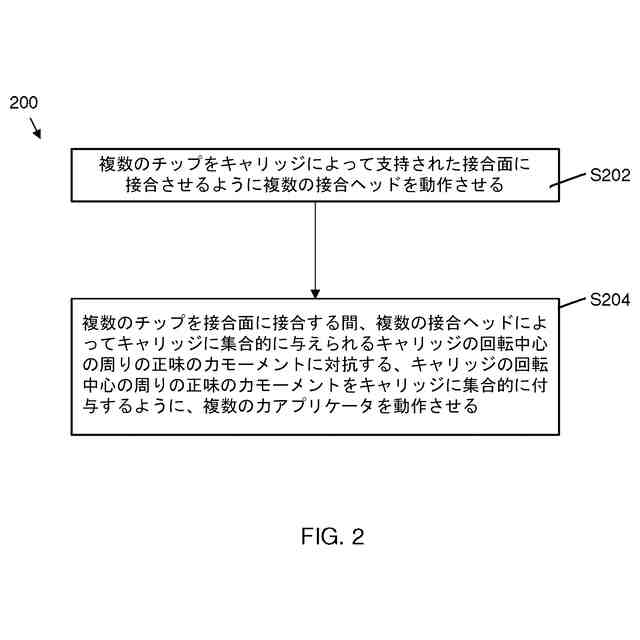
【解決手段】チップソース部と、チップ移送活性化部と、チップ接合部と、を備える接合システムにおいて、チップを接合するための接合方法は、複数のチップをキャリッジによって支持された接合面に接合させるように複数の接合ヘッドを動作させる工程と、複数のチップを接合面に接合する間、複数の接合ヘッドによってキャリッジに集合的に与えられるキャリッジの回転中心の周りの正味の力モーメントに対抗する、キャリッジの回転中心の周りの正味の力モーメントを前記キャリッジに集合的に付与するように、複数の力アプリケータを動作させる工程と、を含む。
【選択図】図2
特許請求の範囲
【請求項1】
チップを接合するための接合方法であって、
複数のチップをキャリッジによって支持された接合面に接合させるように複数の接合ヘッドを動作させる工程と、
前記複数のチップを前記接合面に接合する前記工程の間、前記複数の接合ヘッドによって前記キャリッジに集合的に与えられる前記キャリッジの回転中心の周りの正味の力モーメントに対抗する、前記キャリッジの前記回転中心の周りの正味の力モーメントを前記キャリッジに集合的に付与するように、複数の力アプリケータを動作させる工程と、
を含むことを特徴とする接合方法。
続きを表示(約 1,200 文字)
【請求項2】
前記複数のチップを前記接合面に接合させるように前記複数の接合ヘッドを動作させる前記工程は、接合期間にわたって行われ、
前記方法は、前記接合期間を通して、前記複数の接合ヘッドによって与えられる前記正味の力モーメントに対抗する前記正味の力モーメントを付与するように、前記複数の力アプリケータを繰り返し動作させることをさらに含む、
ことを特徴とする請求項1に記載の接合方法。
【請求項3】
前記複数の力アプリケータは、前記複数の力アプリケータによって与えられる前記正味の力モーメントが前記複数の接合ヘッドによって与えられる前記正味の力モーメントに対抗するように動作される、
ことを特徴とする請求項1に記載の接合方法。
【請求項4】
前記複数の力アプリケータは、前記複数の力アプリケータによって与えられる前記正味の力モーメントが前記複数の接合ヘッドによって与えられる前記正味の力モーメントを打ち消すように動作される、
ことを特徴とする請求項1に記載の接合方法。
【請求項5】
前記複数の力アプリケータによって与えられる前記正味の力モーメントの大きさは、前記複数の接合ヘッドによって与えられる前記正味の力モーメントの大きさの±5%である、
ことを特徴とする請求項1に記載の接合方法。
【請求項6】
前記複数の力アプリケータによって与えられる前記正味の力モーメントの大きさは、前記複数の接合ヘッドによって与えられる前記正味の力モーメントの大きさに等しい、
ことを特徴とする請求項1に記載の接合方法。
【請求項7】
前記複数の接合ヘッドを動作させる前記工程は、前記複数の力アプリケータの動作させる前記工程と同時に起こる、
ことを特徴とする請求項1に記載の接合方法。
【請求項8】
前記複数の力アプリケータによって与えられる前記正味の力モーメントは、前記複数の力アプリケータの各力アプリケータによって前記キャリッジに与えられる前記キャリッジの回転中心の周りの力モーメントの合計であり、
前記複数の接合ヘッドによって与えられる前記正味の力モーメントは、前記複数の接合ヘッドの各接合ヘッドによって前記キャリッジに与えられる前記キャリッジの回転中心の周りの力モーメントの合計である、
ことを特徴とする請求項1に記載の接合方法。
【請求項9】
前記複数の力アプリケータは、2~30個の力アプリケータを含む、
ことを特徴とする請求項1に記載の接合方法。
【請求項10】
前記複数の力アプリケータは、3つの力アプリケータを含む、
ことを特徴とする請求項1に記載の接合方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、複数のチップを一括して接合することを含むチップを接合する接合方法に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
高度なパッケージング技術は、チップの精密かつ正確な制御および配置を要求する。生産性/スループットを高めるために、当技術分野では、複数の接合ヘッドを同時に使用して複数のソースチップを接合面に接合することが望ましい。しかしながら、複数の接合ヘッドを可能な限り同時に動作させる場合であっても、接合ヘッドの一方のチップは、常に他の接合ヘッドの他のチップの直前に接合面に接触する。1つの接合ヘッド上の1つのチップによるこの初期接触は、接合面を支持するキャリッジを回転中心の周りで傾きさせる。回転中心の周りのキャリッジの傾きは、残りの接合ヘッド上のチップのための増大した又は不安定な位置合わせを誘発する。
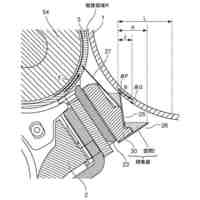
【0003】
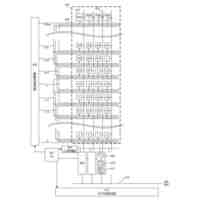
図10は、キャリッジの回転中心の周りの傾きが生じる接合システムの接合部1の概略側面図を示す。接合部1は、ブリッジ3に結合された接合ヘッド2を含む。接合ヘッド2の下には、基板6を有する基板チャック5を保持するキャリッジ4がある。キャリッジ4はベアリング7を介してベース8上に載り、ベアリング7は、空気ベアリングまたは磁気的に支持するベアリングのいずれかとすることができる。図10は、接合ヘッド2が基板6上の接合面10に2つのチップ9を接合しようとした瞬間を示す。しかしながら、上述のように、2つのチップ9を同時に接合面10に接合しようとしても、必ず1つのチップが最初に接合面10に接触することになる。図10に示すように、これが起こると、キャリッジ4は、それが運ぶ全ての構造を含めて、回転中心CRの周りで方向11に回転する。この回転は、第1のチップが接合面10に接触した後に接合面10に接触する第2のチップのアライメントに悪影響を及ぼすオフセット角12を生じさせる。回転は、次のチップの接合のためのアライメント誤差を引き起こす。そのような追加の誤差は、傾き量が接合のロケーションに応じて変化するので、補償することが困難である。図10のシステムでは、接合プロセスによって引き起こされる0.2マイクロラジアンを超えるキャリッジ4の傾きが例えば10nmを超えるオーダーのアライメント誤差をもたらす。アライメント誤差と傾き(チルト)との関係は、キャリッジ4の回転中心CR間の接合方向(Z軸)の距離の関数とすることができる。
【0004】
したがって、キャリッジの回転中心の周りの傾きに起因するアライメント誤差を除去または最小限に抑えながら、複数のソースチップを接合面に接合するための方法およびシステムが、当技術分野において必要とされている。
【発明の概要】
【0005】
チップを接合するための接合方法は、複数のチップをキャリッジによって支持された接合面に接合させるように複数の接合ヘッドを動作させる工程と、前記複数のチップを前記接合面に接合する前記工程の間、前記複数の接合ヘッドによって前記キャリッジの集合的に与えられる前記キャリッジの回転中心の周りの正味の力モーメントに対抗する、前記キャリッジの前記回転中心の周りの正味の力モーメントを前記キャリッジに集合的に付与するように、複数の力アプリケータを動作させる工程と、を含む。
【0006】
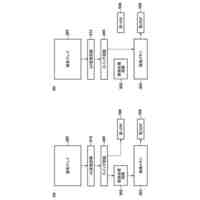
チップを接合するための接合システムは、複数の接合ヘッドと、複数の力アプリケータと、回転中心を有するキャリッジと、1以上のプロセッサと、命令を記憶する1以上のメモリとを含む。前記1以上のプロセッサによって実行されるときに、前記命令は、前記システムに、複数のチップをキャリッジによって支持された接合面に接合させるように複数の接合ヘッドを動作させる工程と、前記複数のチップを前記接合面に接合する前記工程の間、前記複数の接合ヘッドによって前記キャリッジに集合的に与えられる前記キャリッジの回転中心の周りの正味の力モーメントに対抗する、前記キャリッジの前記回転中心の周りの正味の力モーメントを前記キャリッジに集合的に付与するように、複数の力アプリケータを動作させる工程と、を実行させる。
【0007】
複数の物品を製造する製造方法は、複数のチップをキャリッジによって支持された接合面に接合させるように複数の接合ヘッドを動作させる工程と、前記複数のチップを前記接合面に接合する前記工程の間、前記複数の接合ヘッドによって前記キャリッジに集合的に与えられる前記キャリッジの回転中心の周りの正味の力モーメントに対抗する、前記キャリッジの前記回転中心の周りの正味の力モーメントを前記キャリッジに集合的に付与するように、複数の力アプリケータを動作させる工程と、前記複数の物品を製造するために基板を個片化する工程と、を含む。
【図面の簡単な説明】
【0008】
実施形態は例として示されており、添付の図面に限定されない。
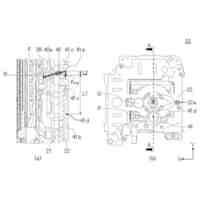
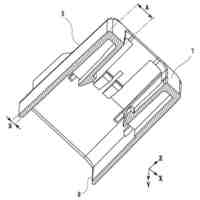
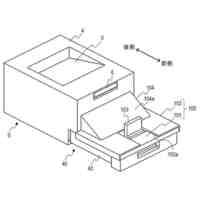
例示的な実施形態による接合システムの概略側面図を示す。
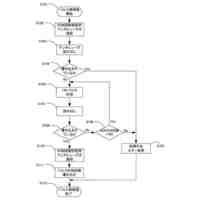
例示的な実施形態による図1の接合システムを使用してチップを接合するための方法のフローチャートを示す。
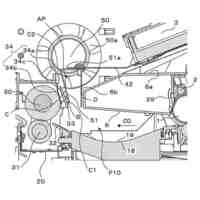
例示的な実施形態による図1の一部分の概略拡大図を示す。
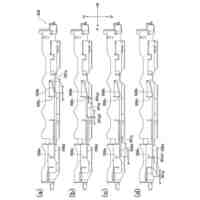
例示的な実施形態による複数の接合ヘッドが基板に向かって延びた後の図1の一部分の拡大図を示す。
例示的な実施形態による接合ヘッド上の複数のチップが基板に到達した後の図1の一部分の拡大図を示す。
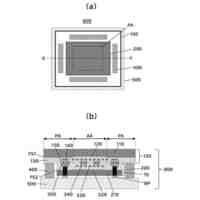
例示的な実施形態による図3Cに示されるのと同じ瞬間における図1の部分の概略上面図を示す。
例示的な実施形態による図4の概略上面図を力ベクトルおよび位置ベクトルとともに示す。
図6は例示的な実施形態による図3Cの一部分の拡大側面図を力および位置ベクトルとともに示す。
例示的な実施形態による接合プロセス中に複数の接合ヘッドによって与えられる力のタイミングチャートを示す。
例示的な実施形態による接合プロセス中に複数の力アプリケータによって与えられる力のタイミングチャートを示す。
例示的な実施形態による、複数の接合ヘッドによって集合的に与えられる正味の力モーメントと、接合プロセス中に複数の力アプリケータによってX軸およびY軸に集合的に与えられる正味の力モーメントとのタイミングチャートを示す。
例示的な実施形態による第2組のチップが接合されている後続の接合プロセス中の図1の一部分の拡大概略側面図を示す。
例示的な実施形態による図8Aに示される同じ瞬間の概略上面図を示す。
別の例示的実施形態による接合システムの一部分の概略拡大図を示す。
接合プロセス中にキャリッジが傾けられている従来技術の接合システムの概略側面図を示す。
【0009】
当業者であれば、図中の要素は簡略化および明瞭化のために示されており、必ずしも縮尺通りに描かれていないことを理解するのであろう。例えば、図中の要素のいくつかの寸法は本発明の実装の理解を助けるために、他の要素と比較して誇張され得る。
【発明を実施するための形態】
【0010】
図面と組み合わせた以下の説明は、本明細書に開示される教示の理解を助けるために提供される。以下の議論は、教示の特定の実装および実装に焦点を当てる。この焦点は、教示を説明するのを助けるために提供され、教示の範囲または適用性に対する限定として解釈されるべきではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
2日前
キヤノン株式会社
トナー
15日前
キヤノン株式会社
移動体
15日前
キヤノン株式会社
トナー
15日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
顕微鏡
16日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
トナー
1日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
16日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
記憶装置
15日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
電子部品
4日前
キヤノン株式会社
処理装置
15日前
キヤノン株式会社
記録装置
15日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
記録装置
15日前
キヤノン株式会社
音声処理装置
4日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
液体収容容器
8日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
16日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ