TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099684
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216539
出願日
2023-12-22
発明の名称
ロボット制御装置、ロボット、ロボットの制御方法及びプログラム
出願人
カシオ計算機株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
A63H
11/00 20060101AFI20250626BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】生き物らしい動作を行うロボットを実現する。
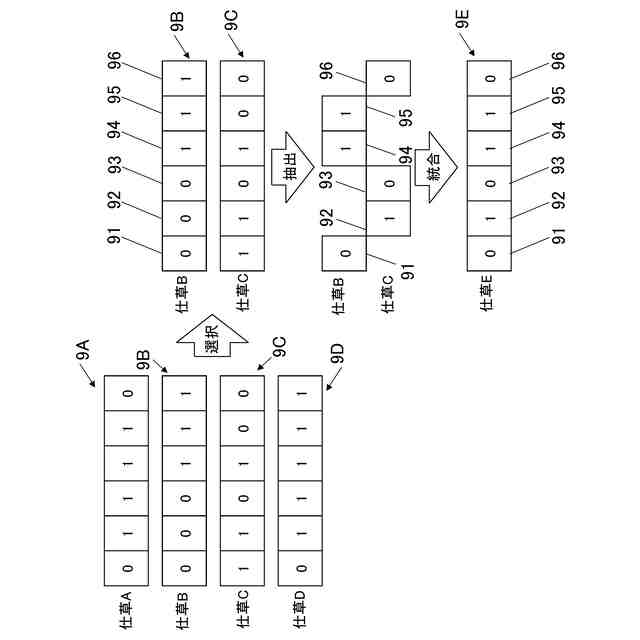
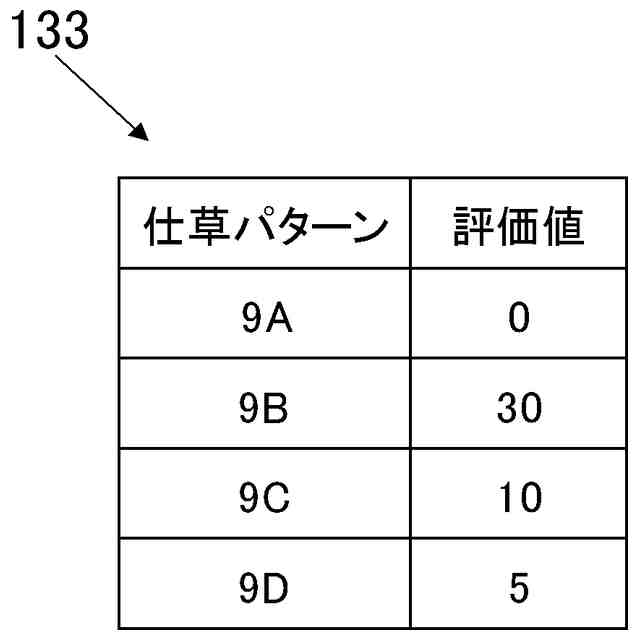
【解決手段】外部からの作用を検出するセンサを備えたロボットを制御するロボット制御装置は、センサが検出した作用に応答する、各々2以上の動作要素の組み合わせからなる複数の動作パターンに従った動作をロボットに行わせる制御部を備え、制御部は、複数の動作パターンの各々の評価値を導出し、評価値に基づいて複数の動作パターンの各々を構成する複数の動作要素を組み合わせることで新たな動作パターンを生成する。
【選択図】図9
特許請求の範囲
【請求項1】
外部からの作用を検出するセンサを備えたロボットを制御するロボット制御装置であって、
前記センサが検出した作用に応答する、各々2以上の動作要素の組み合わせからなる複数の動作パターンに従った動作を前記ロボットに行わせる制御部を備え、
前記制御部は、
前記複数の動作パターンの各々の評価値を導出し、
前記評価値に基づいて前記複数の動作パターンの各々を構成する複数の動作要素を組み合わせることで新たな動作パターンを生成する、
ロボット制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記制御部は、前記複数の動作パターンに従った動作の実行後における前記センサによる検出結果に基づいて、前記複数の動作パターンの各々の評価値を導出する、
請求項1に記載のロボット制御装置。
【請求項3】
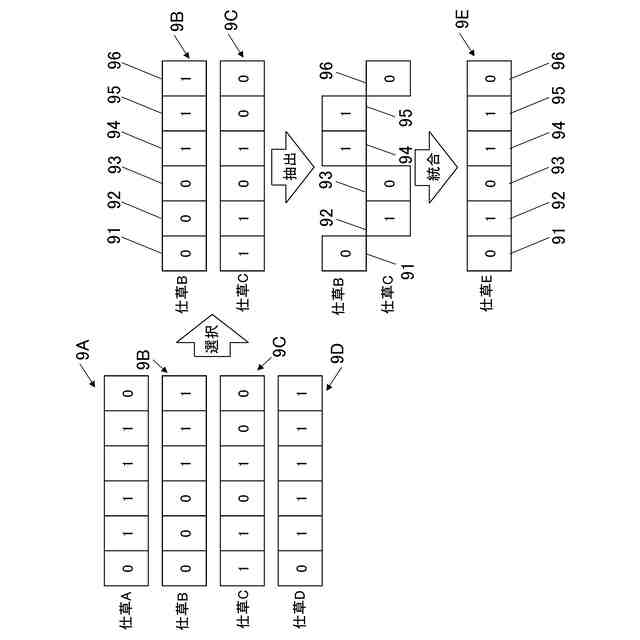
前記制御部は、前記複数の動作パターンのうち前記評価値が高い動作パターンほど高い確率で選択されるように、前記複数の動作パターンから少なくとも2つの動作パターンを選択し、
選択した前記2つの動作パターンの各々を構成する複数の動作要素を組み合わせることで前記新たな動作パターンを生成する、
請求項1に記載のロボット制御装置。
【請求項4】
前記制御部は、前記複数の動作パターンのうち前記評価値が高い動作パターンから順に少なくとも2つの動作パターンを選択し、
選択した前記2つの動作パターンの各々を構成する複数の動作要素を組み合わせることで前記新たな動作パターンを生成する、
請求項1に記載のロボット制御装置。
【請求項5】
前記制御部は、前記評価値に基づいて前記複数の動作パターンから2つの動作パターンを選択し、前記動作要素毎に、前記2つの動作パターンのうち所定の確率で選択した一方の動作パターンの動作要素を組み合わせることで、前記新たな動作パターンを生成する、
請求項1に記載のロボット制御装置。
【請求項6】
前記動作パターンを構成する各動作要素は、ブール値により表されている、
請求項1に記載のロボット制御装置。
【請求項7】
前記制御部は、
前記評価値に基づいて前記複数の動作パターンの各々を構成する複数の動作要素を組み合わせることで複数の前記新たな動作パターンを生成し、
前記複数の動作パターンの前記評価値の合計値が基準値以下である場合に、前記複数の新たな動作パターンのうち少なくとも1つの動作パターンの各動作要素の値を反転させる、
請求項6に記載のロボット制御装置。
【請求項8】
前記制御部は、
前記センサによる検出結果に基づいて、ユーザが前記ロボットに接触したことを検出し、
前記ロボットが前記動作を行ってから前記センサが前記接触を検出するまでの時間が短いほど前記動作に対応する前記動作パターンの前記評価値が大きくなるように前記評価値を導出する、
請求項1に記載のロボット制御装置。
【請求項9】
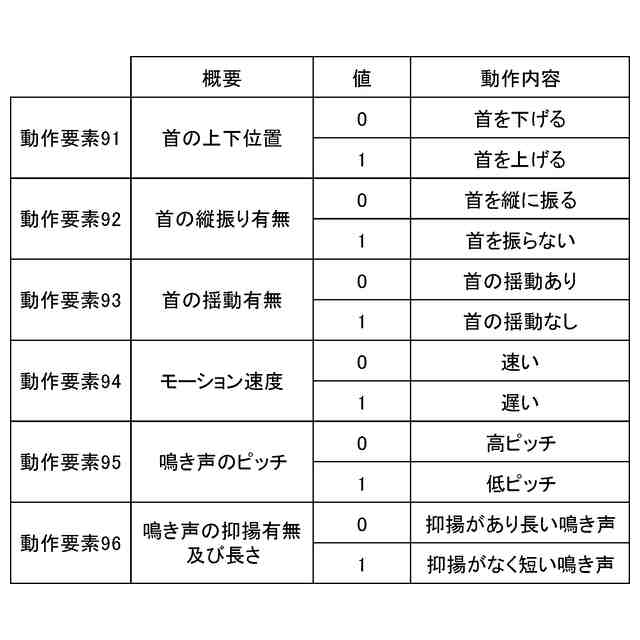
前記動作パターンを構成する前記2以上の動作要素は、所定の部位のある動きの有無、前記部位の動きの速さ、出力する音のピッチの高さ、及び出力する音の長さのうち少なくとも1つを含む、
請求項1に記載のロボット制御装置。
【請求項10】
請求項1~9のいずれか一項に記載のロボット制御装置と、
前記センサと、
を備えるロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御装置、ロボット、ロボットの制御方法及びプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、ある動作をロボットに行わせるための動作データを、ロボットの個性を表す個性パラメータに基づいて補正することで、ロボット毎に異なる個性的な動作を行わせる技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2014-69257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の従来技術では、各ロボットが行う動作は一定であり変化しない。このため、生き物を模したロボットに上記の従来技術を適用すると、画一的な動作を繰り返し行うこととなって生き物らしさに欠けるという課題がある。
【0005】
本発明は、生き物らしい動作を行うロボットを実現することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係るロボット制御装置は、
外部からの作用を検出するセンサを備えたロボットを制御するロボット制御装置であって、
前記センサが検出した作用に応答する、各々2以上の動作要素の組み合わせからなる複数の動作パターンに従った動作を前記ロボットに行わせる制御部を備え、
前記制御部は、
前記複数の動作パターンの各々の評価値を導出し、
前記評価値に基づいて前記複数の動作パターンの各々を構成する複数の動作要素を組み合わせることで新たな動作パターンを生成する。
【発明の効果】
【0007】
本発明によれば、生き物らしい動作を行うロボットを実現することができる。
【図面の簡単な説明】
【0008】
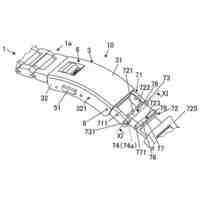
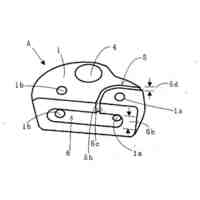
ロボットの外観を示す図である。
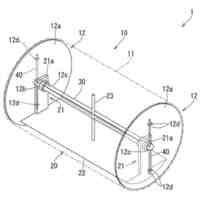
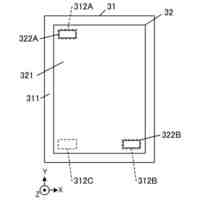
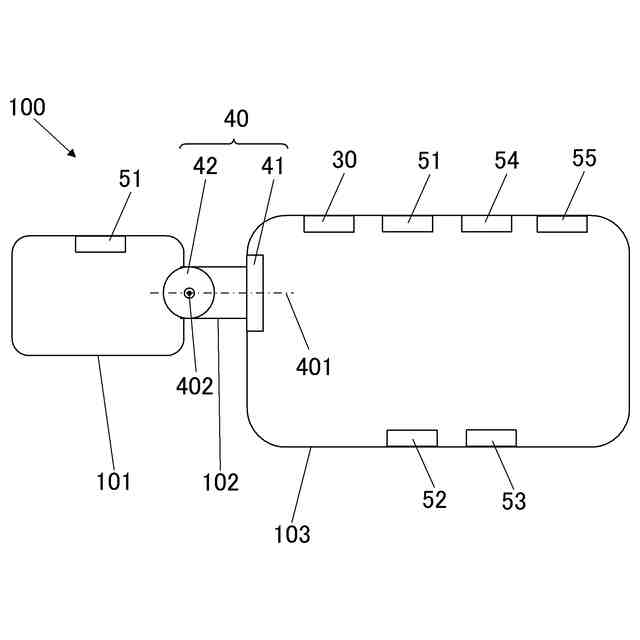
ロボットの本体の構成を示す模式図である。
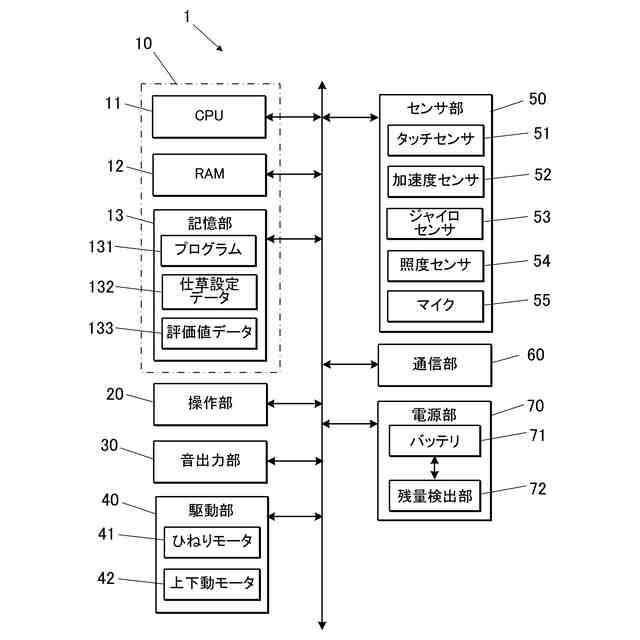
ロボットの機能構成を示すブロック図である。
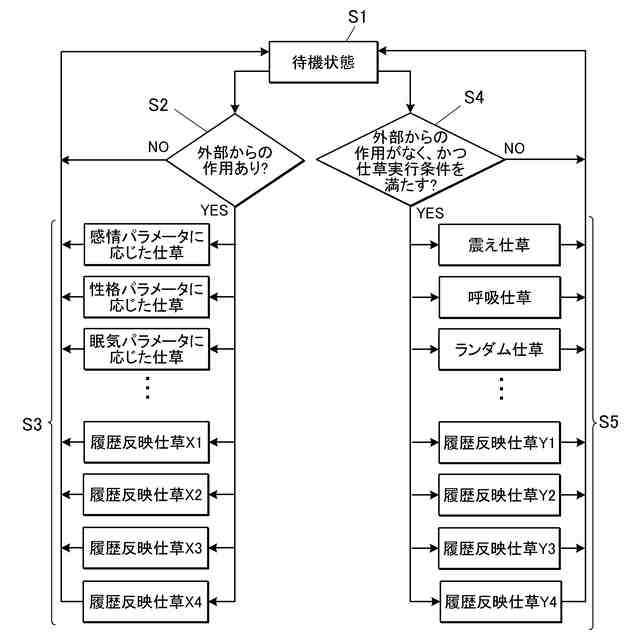
ロボットの動作状態の遷移を概略的に示す図である。
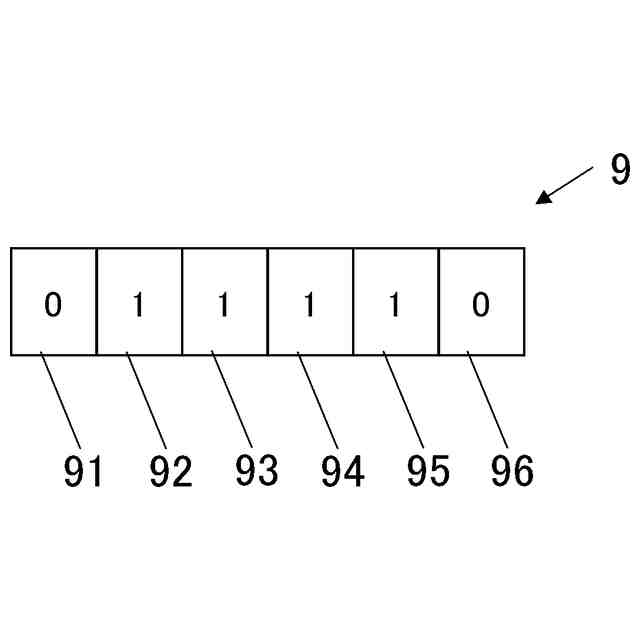
仕草パターンを示す図である。
動作要素の内容を示す図である。
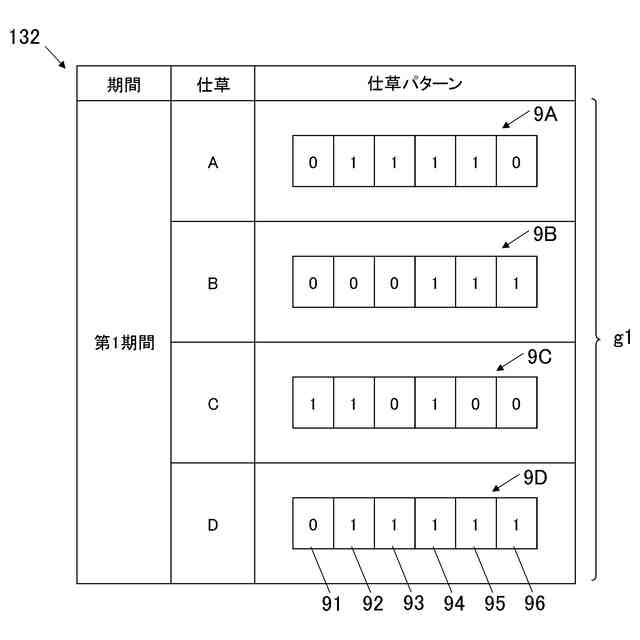
第1期間の仕草パターン群を示す図である。
評価値データの例を示す図である。
第1期間の仕草に基づいて第2期間の仕草を生成する方法を説明する図である。
第2期間の仕草パターン群を示す図である。
仕草の突然変異を説明する図である。
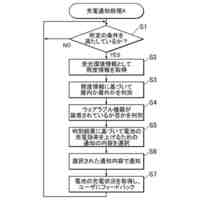
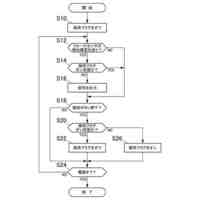
仕草実行処理の制御手順を示すフローチャートである。
仕草学習処理の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態を図面に基づいて説明する。
【0010】
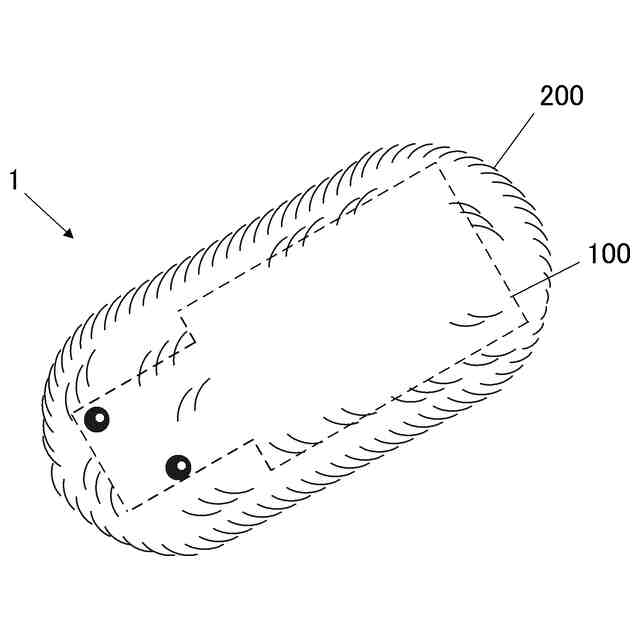
図1は、ロボット1の外観を示す図である。ロボット1は、本体100と、本体100を覆う外装200と、を備える。ロボット1は、小型の生き物を模したペットロボットである。ロボット1は、互いに異なる複数の仕草(動作)を行うことができる。仕草には、首を動かす仕草や、鳴き声を発する仕草等がある。外装200は、本体100の動きに追従して変形する。外装200は、パイル織物により形成された毛皮や、目を模した装飾部材等を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
カシオ計算機株式会社
表示装置、表示方法及びプログラム
3日前
カシオ計算機株式会社
ウェアラブル機器、通知方法及びプログラム
今日
カシオ計算機株式会社
カット装置、カット判断方法及びプログラム
12日前
カシオ計算機株式会社
学習支援装置、学習支援方法及びプログラム
12日前
カシオ計算機株式会社
カット装置、電子機器、カット判断方法及びプログラム
12日前
カシオ計算機株式会社
中留及びバンド
10日前
カシオ計算機株式会社
楽音制御装置、方法及びプログラム
11日前
個人
玩具
1か月前
個人
フィギュア
6か月前
個人
運動補助具
5日前
個人
盤上遊戯具
6か月前
個人
玩具
5か月前
個人
ゲーム玩具
2か月前
個人
球技用ベース
8か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ