TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110107
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024003846
出願日
2024-01-15
発明の名称
線状物供給装置、線状物供給方法および線状物取上方法
出願人
倉敷紡績株式会社
代理人
個人
主分類
D02J
1/18 20060101AFI20250718BHJP(糸;糸またはロープの機械的な仕上げ;整経またはビーム巻き取り)
要約
【課題】細く柔軟な線状物の束から1本の線状物を取り上げるための線状物供給装置を提供する。
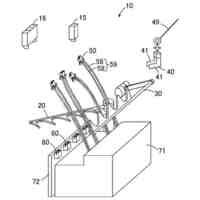
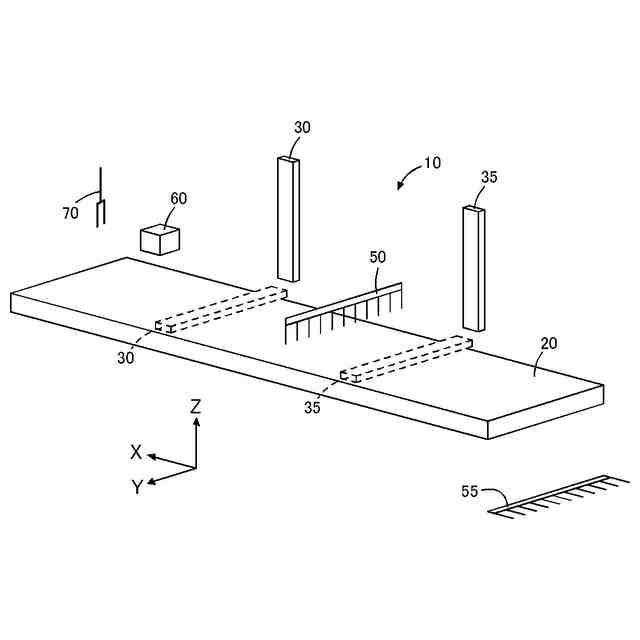
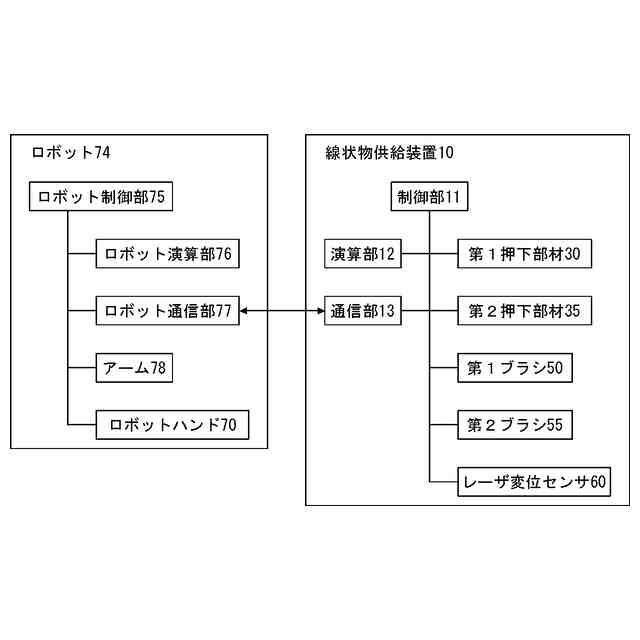
【解決手段】線状物の束を載置するためのテーブル20と、前記テーブル上に載置される前記束の長手方向に分散して設けられ、前記束を上から押さえ込むことが可能な複数の押下部材30、35と、前記テーブルの上方に配置され、前記束の幅方向に並んだ複数の歯を有し、前記束の長手方向に移動可能な第1ブラシ50とを有する線状物供給装置10。
【選択図】図1
特許請求の範囲
【請求項1】
線状物の束から前記線状物の1本を取り上げるために用いる線状物供給装置であって、
前記束を載置するためのテーブルと、
前記テーブル上に載置される前記束の長手方向に分散して配置され、前記束を上から押さえ込むことが可能な複数の押下部材と、
前記テーブルの上方に配置され、前記テーブル上に載置される前記束の幅方向に並んだ複数の歯を有し、前記束の長手方向に移動可能な第1ブラシと、
を有する線状物供給装置。
続きを表示(約 1,400 文字)
【請求項2】
前記第1ブラシはさらに、前記テーブルの後端を超えて後方へ移動して、該第1ブラシの歯を前記テーブル側に向けた状態で上下方向に移動可能である、
請求項1に記載の線状物供給装置。
【請求項3】
前記テーブルの後端の下方に配置され、前記束の幅方向に並んだ複数の歯を有し、上下方向に移動可能な第2ブラシをさらに有する、
請求項1に記載の線状物供給装置。
【請求項4】
前記テーブルの上方に配置され、前記束の長手方向の2か所以上で、前記束の幅方向に走査可能な変位センサをさらに有する、
請求項1~3のいずれか一項に記載の線状物供給装置。
【請求項5】
テーブル上に線状物の束を載置する載置工程と、
前記テーブル上に載置される前記束の長手方向に分散して配置された複数の押下部材のうち、1つ以上の前記押下部材で前記束を上から押さえ込む工程と、
前記押下部材のうちの1つを第1被選択押下部材として選択して、前記第1被選択押下部材は前記束を押さえ込まない状態とし、前記第1被選択押下部材以外の1つ以上の前記押下部材で前記束を上から押さえ込んだ状態で、前記束の幅方向に並んだ複数の歯を備える第1ブラシを用いて、前記第1被選択押下部材を挟んで両側に亘る領域で前記束を梳かすブラッシング工程と、
を有する線状物供給方法。
【請求項6】
前記ブラッシング工程は、さらに、前記第1被選択押下部材以外の前記押下部材から1つを第2被選択押下部材として選択して、前記第2被選択押下部材は前記束を押さえ込まない状態とし、前記第2被選択押下部材以外の1つ以上の前記押下部材で前記束を上から押さえ込んだ状態で、前記第1ブラシを用いて、前記第2被選択押下部材を挟んで両側に亘る領域で前記束を梳かす、
請求項5に記載の線状物供給方法。
【請求項7】
前記第1被選択押下部材が、前記束の長手方向の最も前方にある前記押下部材である、
請求項5または6に記載の線状物供給方法。
【請求項8】
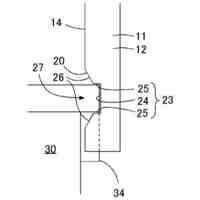
前記載置工程において、前記束の後部が前記テーブルの後端からはみ出して垂下部を形成するように、前記束を前記テーブル上に載置する、
請求項5または6に記載の線状物供給方法。
【請求項9】
複数の前記押下部材のうち少なくとも1つの前記押下部材で前記束を押さえ込んだ状態で、前記テーブルの後端の下方に配置され、前記束の幅方向に並んだ複数の歯を備える第2ブラシを用いて、前記垂下部を梳かす第2ブラッシング工程をさらに有する、
請求項8に記載の線状物供給方法。
【請求項10】
請求項5に記載された線状物供給方法の全工程と、
前記束の長手方向の2か所以上で前記束の幅方向に変位センサを走査し、走査した領域で最も高い位置にある前記線状物を被選定線状物として選定するとともに、前記走査した領域における前記被選定線状物の位置および向きを算出する工程と、
ロボットハンドの位置および姿勢を前記被選定線状物の位置および向きに合わせて、前記ロボットハンドで前記被選定線状物を把持する工程と、
前記押下部材は前記束を押さえ込まない状態としながら、前記ロボットハンドを移動させて前記被選定線状物を前記束から分離して抜き取る抜取工程と、
を有する線状物取上方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンド等に線状物を供給するための装置および方法に関し、より詳細には、細く柔軟な線状物の束をロボットハンド等に供給する装置および方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
細く柔軟で変形しやすい線状物を対象とする様々な作業において、ロボットを用いて線状物のハンドリングを自動化することが行われている。例えば、電線等のケーブル、光ファイバ、細径の各種チューブ類を対象として、端子の圧着、コネクタ等部品の締結、半田付け、溶着、接続などの加工を行う際にワークとなる線状物をロボットハンドで把持して、目標となる加工装置や検査装置まで移送してセットすることが行われている。このとき、多数の線状物が束状にして供給される場合は、ロボットハンドはまず、供給された多数の線状物の中から1本の線状物を把持する必要がある。
【0003】
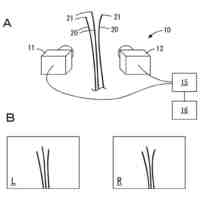
ロボットハンドが1本の線状物を容易に取り上げられるように、線状物を分散した状態にして供給する装置が知られている。例えば、特許文献1には、筒状の容器に収容された複数の柔軟な線状物を、容器から突出した上端部に気体を吹き付けることにより分散させて、ロボットハンドが1本の線状物を容易に把持して引き抜けるようにして供給する線状物分散装置が記載されている。特許文献2には、筒状の容器に収容された複数の柔軟な線状物を、容器から突出した上端部をジャバラ状の部材で機械的に広げることにより分散させて、ロボットハンドが1本の線状物を容易に把持して抜き取れるようにして供給する線状物分散装置が記載されている。
【0004】
また、線状物の束から、予め1本の線状物を取り上げる装置が知られている。係る装置を利用すれば、取り上げた線状物をロボットハンドに容易に受け渡すことができる。例えば、特許文献3には、柔軟な線状物の束を、載置面の中ほどに設けられた間隙の両側に渡して載置して、当該間隙の下方から、上面がV字型に形成された第1押上部材で線状物の束を押し上げ、続いて、上面に1本の線状物が嵌る凹みが形成された第2押上部材で1本の線状物を押し上げる線状物取出装置が記載されている。特許文献4には、断面がV字型のトレイに載置された柔軟な線状物の束に上から押し付けて、1本の線状物を吸着して取り上げる吸着ノズルが記載されている。特許文献5には、一対の指の間に形成されて線状物の1本が嵌る溝と、線状物を溝に向けて吸引する吸引手段とを有し、トレイ上の多数の柔軟な線状物から溝内に吸引した線状物を、指を閉じることで挟持して取り上げる線状物把持装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2021-113121号公報
特開2022-091602号公報
特開2021-194736号公報
特開2021-194712号公報
特開2023-090089号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1および2に記載された線状物分散装置では、線状物の数が増えると、装置をかなり大型化する必要があった。
【0007】
特許文献3に記載された装置では、線状物同士が絡まっている場合、線状物の変形が大きい場合や線状物に癖がついている場合には、第1押上部材のV字の中心に線状物が集まらず、第2押上部材が1本の線状物の押し上げに失敗することがあった。
【0008】
特許文献4に記載された装置では、線状物同士が絡まっていると、保持した線状物を持ち上げるときに他の線状物を引きずることで、線状物の束の形が崩れやすかった。そして、束の形が許容限度を超えて崩れると、修正のために連続操業を中断する必要があった。また、線状物に端子等が装着されている場合に端子同士が引っ掛かると、保持した線状物が吸着ノズルから脱落する恐れがあった。特許文献5に記載された装置では、線状物同士が絡まっていると、把持した線状物を持ち上げるときに他の線状物を引きずることで、線状物の束の形が崩れやすかった。また、線状物に端子等が装着されている場合に端子同士が引っ掛かると、特許文献4と異なり指を閉じて線状物を挟持しているため把持した線状物が脱落することはないが、端子の突起など強度の低い箇所に損傷を与える恐れがあった。
【0009】
本発明は、上記を考慮してなされたものであり、細く柔軟であるために変形しやすい線状物の束からロボットハンドで1本の線状物を取り上げるときにも、取り上げる線状物に他の線状物が引きずられず、また、線状物に端子等が装着されている場合でも端子等を損傷することが少ない線状物供給装置および方法を提供することを目的とする。また、併せて、係る線状物供給方法を利用した線状物取上方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題に対して、本発明の装置および方法では、線状物の束にブラシの歯を挿して束の長手方向に移動させることにより、線状物を梳かし、線状物のもつれをほぐしてロボットハンド等に供給できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
倉敷紡績株式会社
線状物の3次元計測方法
2日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
16日前
倉敷紡績株式会社
詰め物用糸及びこれを含む中綿構造体
2日前
倉敷紡績株式会社
清涼性混紡紡績糸及びこれを用いた清涼性生地
1か月前
倉敷紡績株式会社
機能性混紡紡績糸及びこれを用いた機能性生地
2か月前
倉敷紡績株式会社
セルロース系グラフト繊維、これを含む繊維構造体及びその製造方法
24日前
倉敷紡績株式会社
コネクタ接続システム、リード線制御装置、コネクタ接続方法およびリード線移動方法
16日前
倉敷紡績株式会社
詰め物用糸及びこれを含む中綿構造体
2日前
東レ株式会社
ポリエステル中空繊維原綿、ポリエステル中空繊維球状体およびそれらの製造方法
18日前
キオクシア株式会社
半導体記憶装置
2日前
バイスクルテクス・リミテッド
ヘテロタンデム二環式ペプチド複合体
18日前
他の特許を見る






 特許ウォッチ
特許ウォッチ