TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136170
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024034413
出願日
2024-03-06
発明の名称
コネクタ接続システム、リード線制御装置、コネクタ接続方法およびリード線移動方法
出願人
倉敷紡績株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】リード線に装着されたコネクタを相手方コネクタに接続する場合に、リード線と相手方コネクタの配置によらず、相手方コネクタの位置および向きを計測して接続可能なシステムを提供する。
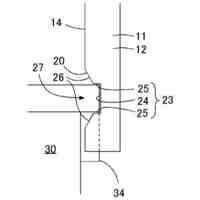
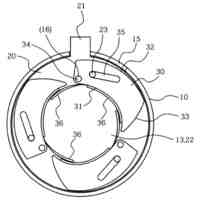
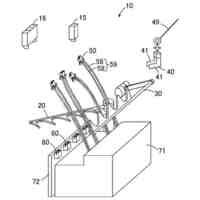
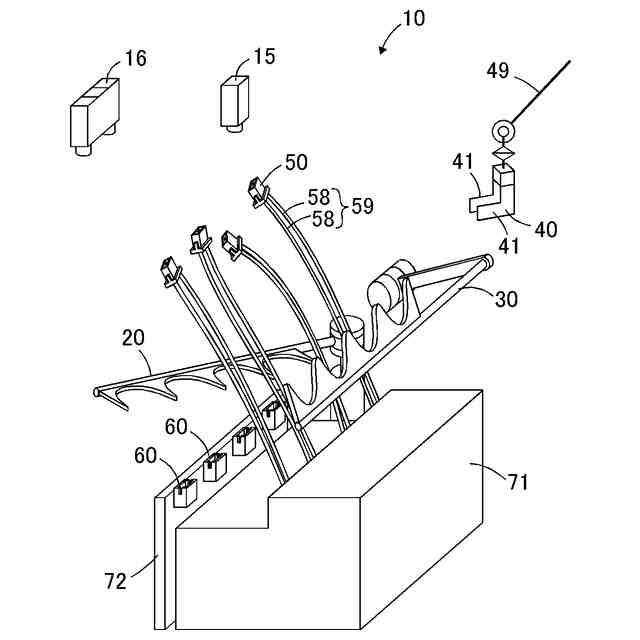
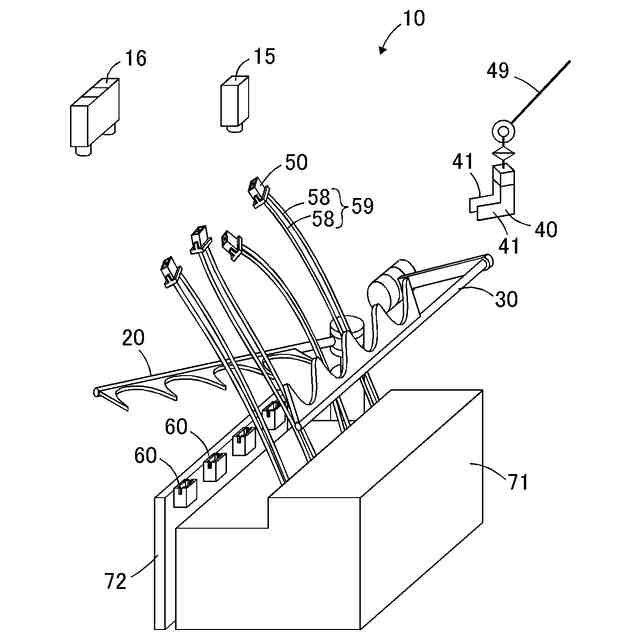
【解決手段】一端が固定されたリード線58の先端に装着されたコネクタ50を相手方コネクタ60に接続するためのシステムであって、前記相手方コネクタの位置を計測可能な第1計測器15と、前記相手方コネクタの位置を計測する際に、当該計測を邪魔しない退避位置に前記リード線および前記コネクタを退避させるためのコネクタ退避機構20と、前記コネクタの位置および向きを計測可能な第2計測器16と、前記コネクタを把持するためのハンド40とを有するコネクタ接続システム10。
【選択図】図1
特許請求の範囲
【請求項1】
一端が固定されたリード線の先端に装着されたコネクタを相手方コネクタに接続するためのシステムであって、
前記相手方コネクタの位置を計測可能な第1計測器と、
前記相手方コネクタの位置を計測する際に、当該計測を邪魔しない退避位置に前記リード線および前記コネクタを退避させるためのコネクタ退避機構と、
前記コネクタの位置および向きを計測可能な第2計測器と、
前記コネクタを把持するためのハンドと、
を有するコネクタ接続システム。
続きを表示(約 1,500 文字)
【請求項2】
前記コネクタ退避機構は、列をなした複数の前記リード線および前記コネクタの全部を、前記退避位置にまとめて退避可能である、
請求項1に記載のコネクタ接続システム。
【請求項3】
前記コネクタを前記退避位置から前記第2計測器による計測のための計測用位置に移動可能なコネクタ移動機構をさらに有する、
請求項1に記載のコネクタ接続システム。
【請求項4】
一端が固定された複数のリード線の姿勢を制御する制御装置であって、
前記リード線の先端または前記リード線の先端に装着された先端部材を空中で計測するための計測用位置に、前記リード線の先端または前記先端部材をまとめて移動させるための移動機構を有する、
リード線制御装置。
【請求項5】
前記リード線の先端または前記先端部材の移動目標の計測を邪魔しない退避位置に前記複数のリード線をまとめて退避させるための退避機構をさらに有する、
請求項4に記載のリード線制御装置。
【請求項6】
一端が固定された複数のリード線の姿勢を制御する制御装置であって、
前記リード線の先端または前記リード線の先端に装着された先端部材の移動目標の計測を邪魔しない退避位置に前記複数のリード線をまとめて退避させるための退避機構と、
前記リード線の先端または前記先端部材を計測するための計測用位置に、前記リード線の先端または前記先端部材を移動させるための移動機構とを有する、
リード線制御装置。
【請求項7】
一端が固定されたリード線の先端に装着されたコネクタを相手方コネクタに接続する方法であって、
コネクタ退避機構によって、第1計測器による前記相手方コネクタの位置の計測を邪魔しない退避位置に前記リード線および前記コネクタを退避させるコネクタ退避工程と、
前記第1計測器によって前記相手方コネクタの位置を計測する第1計測工程と、
第2計測器によって前記コネクタの位置および向きを計測する第2計測工程と、
前記コネクタをハンドで把持する工程と、
前記コネクタを前記相手方コネクタに接続する工程と、
を有するコネクタ接続方法。
【請求項8】
前記コネクタ退避工程が、列をなした複数の前記リード線および前記コネクタの全部を前記退避位置にまとめて退避させる工程である、
請求項7に記載のコネクタ接続方法。
【請求項9】
前記第2計測工程の前に、前記コネクタを前記退避位置から前記第2計測器による計測のための計測用位置に移動させる工程をさらに有する、
請求項7に記載のコネクタ接続方法。
【請求項10】
一端が固定された複数のリード線の先端または前記リード線の先端に装着された先端部材を移動目標まで移動する方法であって、
前記移動目標の計測を邪魔しない退避位置に前記複数のリード線をまとめて退避させる退避工程と、
前記移動目標の位置を計測する第1計測工程と、
前記リード線の先端または前記先端部材を計測するための計測用位置に前記リード線の先端または前記先端部材を移動させる工程と、
前記リード線の先端または前記先端部材の位置および向きを計測する第2計測工程と、
前記リード線または前記先端部材をハンドで把持する工程と、
前記リード線の先端または前記先端部材を前記移動目標に移動する工程と、
を有するリード線移動方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、各種家電や電子機器の組み立て製造現場で、ロボットを用いてコネクタの接続作業等を自動化するためのシステムおよび方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
リード線に装着されたコネクタの位置および向きを3次元的に計測して、ロボットハンドで把持して相手方コネクタに接続することが、従来から行われている。
【0003】
例えば、特許文献1には、微小なコネクタを含む画像データからコネクタに関する画像部分を切り出し、学習済みの特徴点推定機械学習モデルに入力して、コネクタの特徴点を推定することが記載されている。これにより、柔軟で可撓性のあるケーブルの端に取り付けられたコネクタが、僅かな外力で姿勢や位置が変わってしまうような場合でも、リアルタイムで認識されるコネクタの姿勢及び位置に関するデータをロボットに与え続けることができる。
【先行技術文献】
【特許文献】
【0004】
特開2023-034203号公報
国際公開第2023/068064号
【発明の概要】
【発明が解決しようとする課題】
【0005】
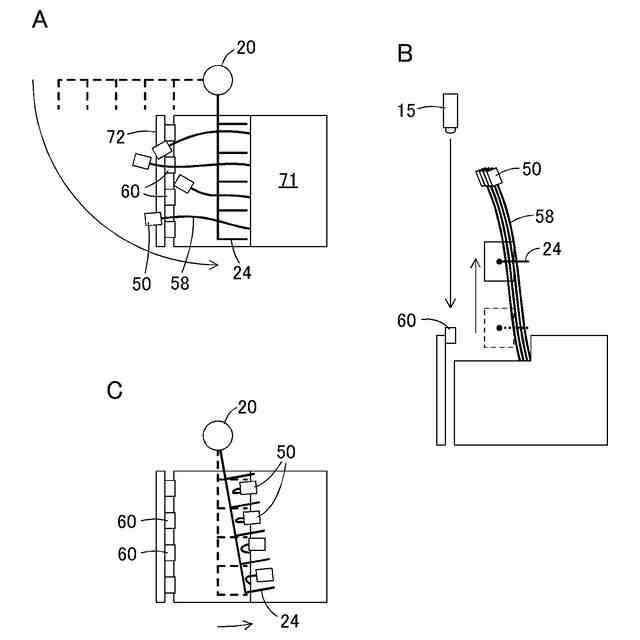
ところで、相手方コネクタの位置および向きが正確に知られていない場合は、相手方コネクタについても位置および向きを計測した上で、コネクタが接続される。このとき、リード線およびコネクタが相手方コネクタを計測器から隠す位置にあると、そのままの状態では相手方コネクタの位置および向きを計測することができない。
【0006】
特許文献2には、電子機器の筐体と回路基板との間から立ち上がるフレキシブルプリント配線板(FPC)の先端部に装着された第1部品を回路基板上の第2部品に接続する方法が記載されている。そして、FPCが第2部品に被さって第2部品を計測用の第3カメラから隠していることに対して、FPCの補強板を吸着ノズルで吸着し、FPCを起こして第2部品の上方から退避させてから、第2部品を第3カメラで撮像することが記載されている。しかし、FPCに貼付された補強板と異なり、一般的な略直方体状で小型のコネクタは吸着把持することが容易ではない。
【0007】
また、特許文献2で用いられたFPCは幅方向には大きく曲がらないので、仮に、FPCが幅方向に複数並んで配置された場合にも、接続しようとするFPCを退避させれば、接続先の第2部品の計測が可能となる。しかし、一般的なリード線はあらゆる方向に自由に大きく曲がるため、コネクタを装着したリード線と相手方コネクタが複数並んで配置されていると、1本のコネクタとリード線を退避させても、別の、例えば隣のコネクタとリード線が接続しようとする相手方コネクタの計測を妨げることがあった。
【0008】
本発明は、上記を考慮してなされたものであり、リード線に装着されたコネクタを相手方コネクタに接続する場合に、リード線と相手方コネクタの配置によらず、接続しようとする相手方コネクタの位置を計測して、コネクタと相手方コネクタを接続可能なシステムおよび方法を提供することを目的とする。また、併せて、リード線の先端またはリード線の先端に装着された先端部材を移動目標まで移動するための方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のコネクタ接続システムは、一端が固定されたリード線の先端に装着されたコネクタを相手方コネクタに接続するためのシステムであって、前記相手方コネクタの位置を計測可能な第1計測器と、前記相手方コネクタの位置を計測する際に、当該計測を邪魔しない退避位置に前記リード線および前記コネクタを退避させるためのコネクタ退避機構と、前記コネクタの位置および向きを計測可能な第2計測器と、前記コネクタを把持するためのハンドとを有する。
【0010】
ここで、リード線は、上下左右どの方向にも曲がる柔軟性を有するものであり、リード線には、FPCや帯状のフレキシブルフラットケーブル(FFC)は含まない。リード線の先端とは、固定されていない他端である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
11日前
倉敷紡績株式会社
清涼性混紡紡績糸及びこれを用いた清涼性生地
1か月前
倉敷紡績株式会社
セルロース系グラフト繊維、これを含む繊維構造体及びその製造方法
19日前
倉敷紡績株式会社
コネクタ接続システム、リード線制御装置、コネクタ接続方法およびリード線移動方法
11日前
個人
固定補助具
1か月前
個人
折りたたみ工具
22日前
株式会社三協システム
製函機
20日前
株式会社三協システム
移載装置
19日前
CKD株式会社
把持装置
21日前
株式会社不二越
ロボット操作装置
27日前
株式会社不二越
ロボットシステム
1か月前
日本精工株式会社
締結用工具
1か月前
株式会社ミクロブ
把持装置
21日前
SMC株式会社
着脱装置
20日前
太陽パーツ株式会社
アシストスーツ
22日前
株式会社不二越
移動ロボットシステム
1日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
ロボットシステム
22日前
本田技研工業株式会社
装置
4日前
株式会社不二越
エッジ仕上げ装置
11日前
株式会社不二越
ロボットシステム
19日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社不二越
垂直多関節ロボット
12日前
トヨタ自動車株式会社
歩行ロボット
25日前
ダイハツ工業株式会社
移載治具
1か月前
ライオン株式会社
移載システム
13日前
大和ハウス工業株式会社
ねじ回転工具
20日前
シンフォニアテクノロジー株式会社
搬送装置
1日前
株式会社不二越
ロボットシステム
1か月前
シヤチハタ株式会社
マーキング装置
25日前
コネクテッドロボティクス株式会社
保持システム
1か月前
セイコーエプソン株式会社
ロボット
20日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
11日前
シヤチハタ株式会社
マーキング装置
25日前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ