TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147400
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024047634
出願日
2024-03-25
発明の名称
位置測定システム、位置測定方法及びプログラム
出願人
カシオ計算機株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
G01B
11/00 20060101AFI20250930BHJP(測定;試験)
要約
【課題】複数の撮像装置がなくとも、対象物の測位を可能とする。
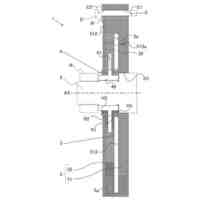
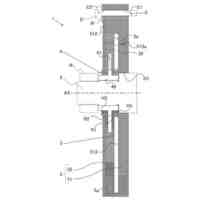
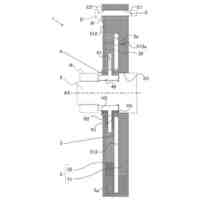
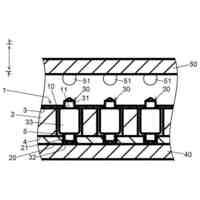
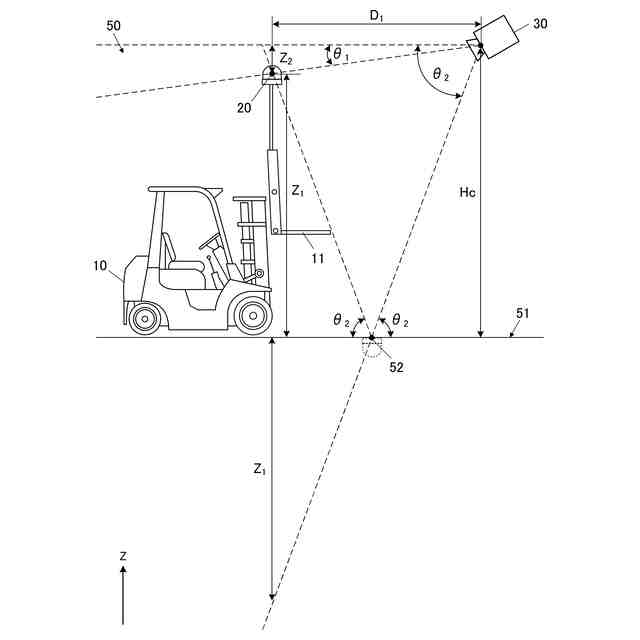
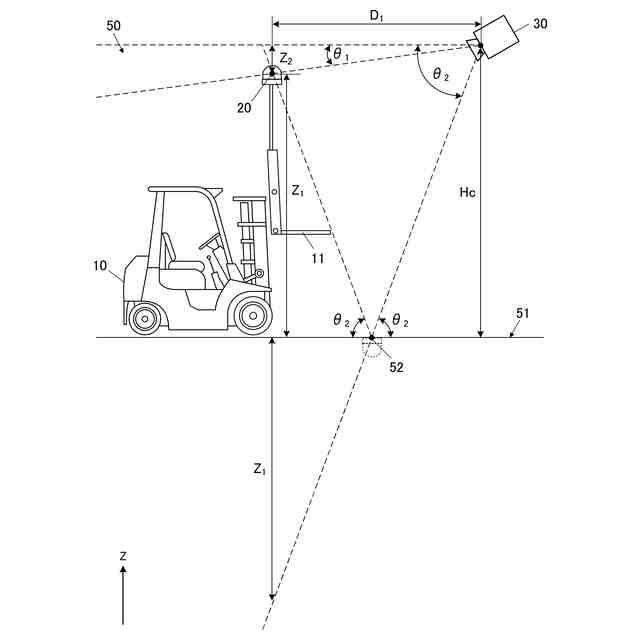
【解決手段】位置測定システムは、空間50における設置位置及び撮影方向が既知であるカメラ30(撮像装置)により取得された画像から、空間50を移動可能な発光装置20からの光を直接受光する直接像の位置、及び、発光装置20により発せられた光が空間50内の床面51(所定の平面)で反射された反射光による反射像の位置を取得し、画像における直接像の位置、及び、反射像の位置に基づいて、空間50における発光装置20の3次元位置を取得する。
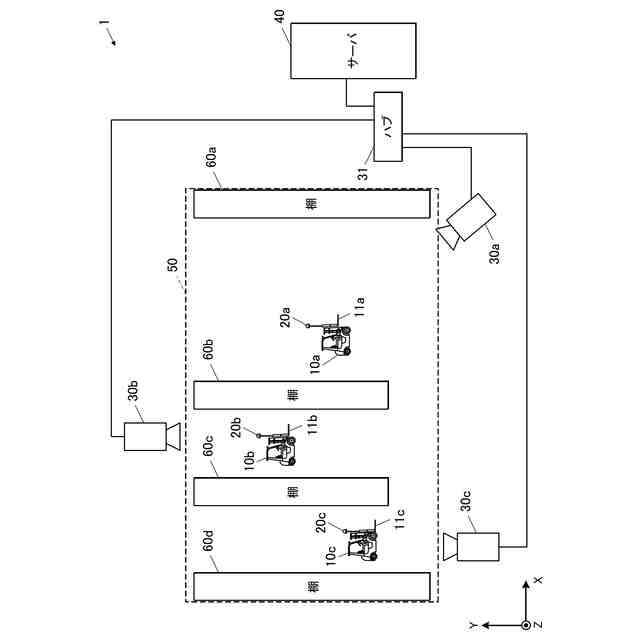
【選択図】図4
特許請求の範囲
【請求項1】
空間における設置位置及び撮影方向が既知である撮像装置により取得された画像から、前記空間を移動可能な発光装置からの光を直接受光する直接像の位置、及び、前記発光装置により発せられた光が前記空間内の所定の平面で反射された反射光による反射像の位置を取得し、
前記画像における前記直接像の位置、及び、前記反射像の位置に基づいて、前記空間における前記発光装置の3次元位置を取得する、
制御部を備える位置測定システム。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、
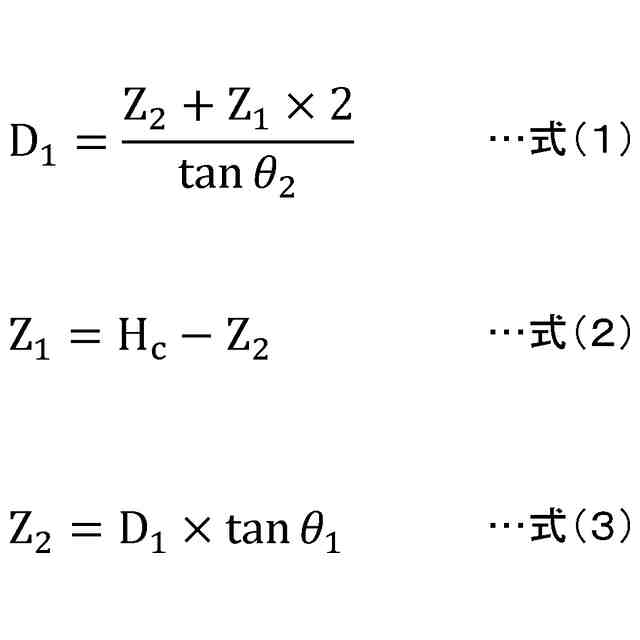
前記画像における前記直接像の位置から、前記所定の平面に直交し前記撮像装置及び前記発光装置を含む仮想平面に含まれる、前記所定の平面に平行な直線と、前記撮像装置と前記発光装置とを結ぶ線分とのなす角度である第1角度を求め、
前記画像における前記反射像の位置から、前記直線と、前記撮像装置と前記所定の平面上の前記発光装置により発せられた光の反射位置とを結ぶ線分とのなす角度である第2角度を求め、
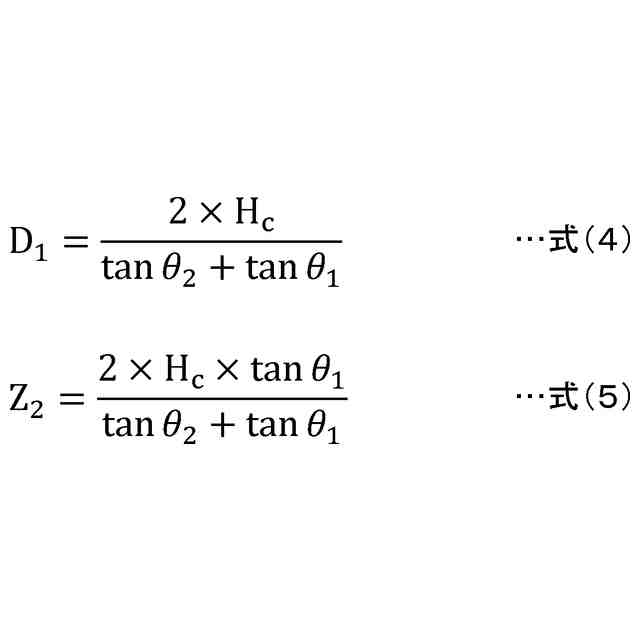
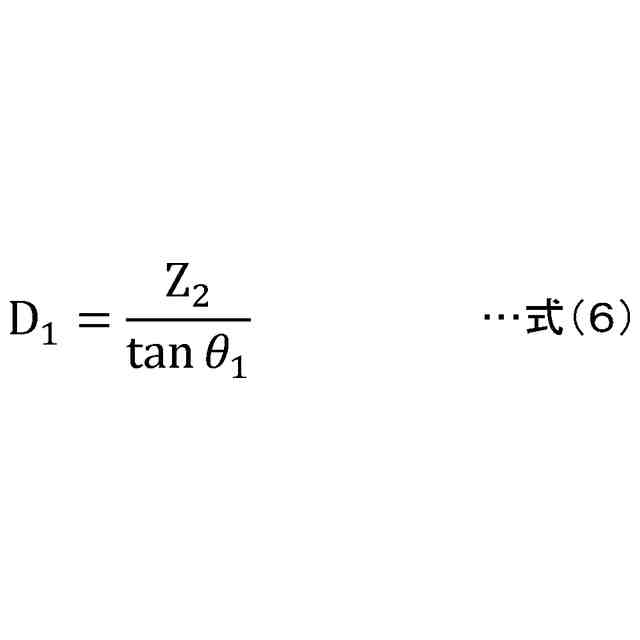
前記第1角度及び前記第2角度から、前記直線に平行な方向における前記撮像装置と前記発光装置との距離である第1距離、及び、前記所定の平面に直交する方向における前記撮像装置と前記発光装置との距離である第2距離を算出し、
前記第1距離及び前記第2距離に基づいて、前記空間における前記発光装置の3次元位置を取得する、
請求項1に記載の位置測定システム。
【請求項3】
前記発光装置は、可視光領域の光を変調して当該発光装置の識別情報を発信するものであり、
前記制御部は、前記画像から同一の識別情報に対応する前記直接像の位置及び前記反射像の位置を取得する、
請求項1又は2に記載の位置測定システム。
【請求項4】
空間における設置位置及び撮影方向が既知である撮像装置により取得された画像から、前記空間を移動可能な発光装置からの光を直接受光する直接像の位置、及び、前記発光装置により発せられた光が前記空間内の所定の平面で反射された反射光による反射像の位置を取得する工程と、
前記画像における前記直接像の位置、及び、前記反射像の位置に基づいて、前記空間における前記発光装置の3次元位置を取得する工程と、
を含む位置測定方法。
【請求項5】
コンピュータを、
空間における設置位置及び撮影方向が既知である撮像装置により取得された画像から、前記空間を移動可能な発光装置からの光を直接受光する直接像の位置、及び、前記発光装置により発せられた光が前記空間内の所定の平面で反射された反射光による反射像の位置を取得する手段、
前記画像における前記直接像の位置、及び、前記反射像の位置に基づいて、前記空間における前記発光装置の3次元位置を取得する手段、
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置測定システム、位置測定方法及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、複数のカメラでマーカを撮像し、空間におけるマーカの位置を測定する技術が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2005/124687号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載の技術では、複数のカメラ(撮像装置)が必要なため、測位の状況によって対象物の測位ができないおそれがあった。
【0005】
本発明は、上記の従来技術における問題に鑑みてなされたものであって、複数の撮像装置がなくとも、対象物の測位を可能とすることを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る位置測定システムは、空間における設置位置及び撮影方向が既知である撮像装置により取得された画像から、前記空間を移動可能な発光装置からの光を直接受光する直接像の位置、及び、前記発光装置により発せられた光が前記空間内の所定の平面で反射された反射光による反射像の位置を取得し、前記画像における前記直接像の位置、及び、前記反射像の位置に基づいて、前記空間における前記発光装置の3次元位置を取得する、制御部を備える。
【発明の効果】
【0007】
本発明によれば、複数の撮像装置がなくとも、対象物の測位が可能となる。
【図面の簡単な説明】
【0008】
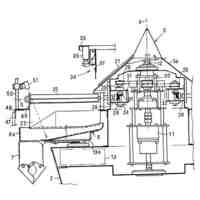
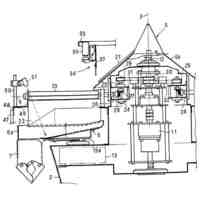
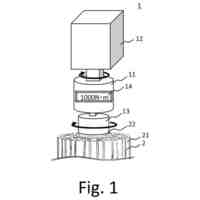
本発明の実施形態における位置測定システムの構成を示す図である。
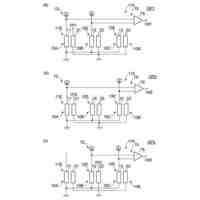
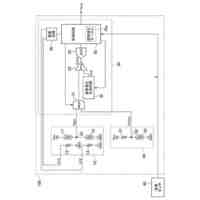
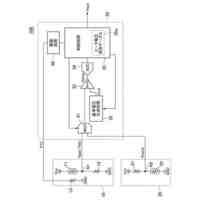
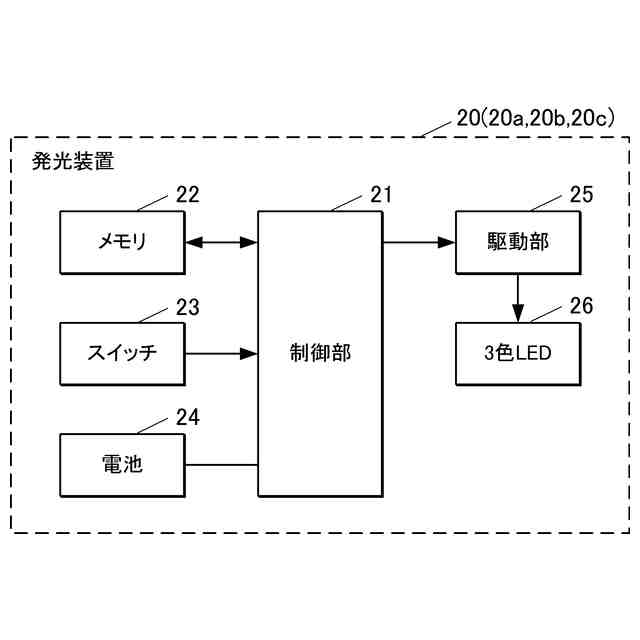
発光装置の構成を示すブロック図である。
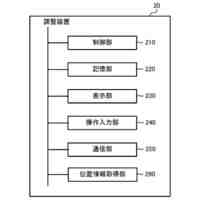
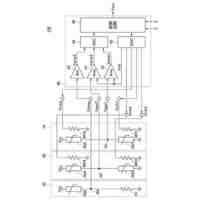
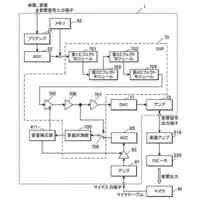
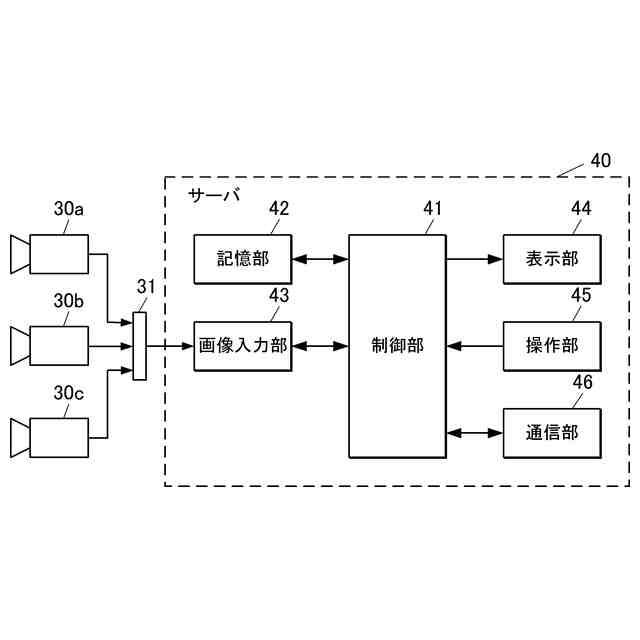
サーバの構成を示すブロック図である。
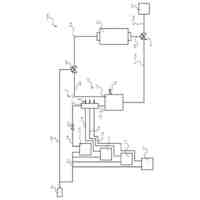
カメラを利用した3次元測位について説明するための図である。
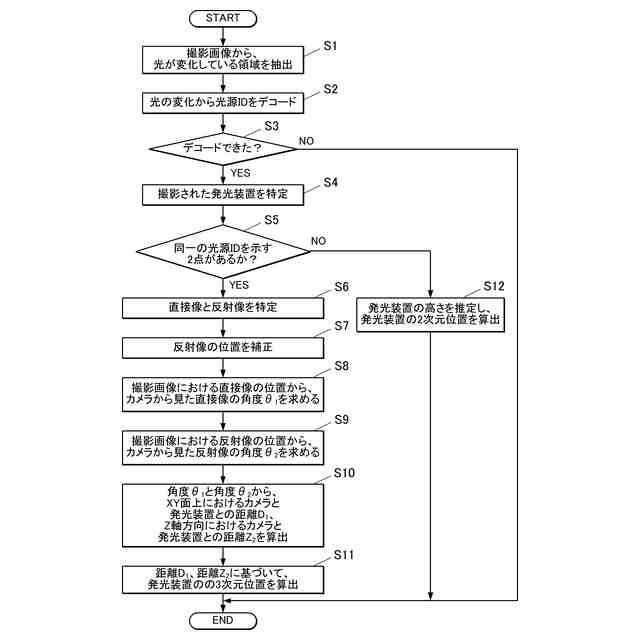
サーバにおいて実行される位置測定処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明に係る位置測定システム、位置測定方法及びプログラムの実施形態について、図面を参照して詳細に説明する。なお、以下に述べる実施形態には、本発明を実施するために技術的に好ましい種々の限定が付されているが、本発明の技術的範囲を以下の実施形態及び図示例に限定するものではない。
【0010】
図1に示すように、本実施形態における位置測定システム1は、フォークリフト10a,10b,10cと、発光装置20a,20b,20cと、撮像装置としてのカメラ30a,30b,30cと、ハブ31と、サーバ40と、から構成される。位置測定システム1が適用される空間50は、互いに直交するX軸、Y軸及びZ軸の座標によって、3次元位置が特定される。X軸及びY軸は水平面を含む方向に取られており、XY平面は空間50の床面51(図4参照)と平行である。Z軸は、鉛直方向に沿った軸である。なお、図1では、空間50の上面図を模式的に示しているが、フォークリフト10a,10b,10cについては、空間50の床面51を走行する姿を側面から見た図(上下方向がZ軸方向に相当する図)となっており、実際の向きと異なっている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カシオ計算機株式会社
電子装置
3日前
カシオ計算機株式会社
調整装置、方法及びプログラム
3日前
カシオ計算機株式会社
情報処理装置、演奏装置、方法およびプログラム
4日前
カシオ計算機株式会社
電子機器、電源供給状態表示方法およびプログラム
2日前
カシオ計算機株式会社
スタンド、鍵盤楽器セット
2日前
カシオ計算機株式会社
音量制御装置、電子楽器、音量制御方法及びプログラム
2日前
個人
メジャー文具
12日前
個人
アクセサリー型テスター
5日前
個人
高精度同時多点測定装置
4日前
ユニパルス株式会社
ロードセル
11日前
日本精機株式会社
位置検出装置
18日前
日本精機株式会社
位置検出装置
18日前
日本精機株式会社
位置検出装置
18日前
大和製衡株式会社
組合せ秤
23日前
大和製衡株式会社
組合せ秤
23日前
アズビル株式会社
圧力センサ
17日前
株式会社ヨコオ
ソケット
11日前
株式会社ユーシン
操作検出装置
20日前
トヨタ自動車株式会社
検査装置
20日前
エイブリック株式会社
磁気センサ回路
17日前
トヨタ自動車株式会社
監視装置
10日前
株式会社チノー
放射光測温装置
11日前
株式会社ヨコオ
ソケット
10日前
ダイキン工業株式会社
監視装置
9日前
株式会社東芝
センサ
23日前
株式会社東芝
センサ
23日前
TDK株式会社
磁気センサ
10日前
東レエンジニアリング株式会社
計量装置
20日前
ローム株式会社
半導体装置
3日前
TDK株式会社
ガスセンサ
17日前
株式会社東芝
重量測定装置
16日前
ローム株式会社
半導体装置
3日前
TDK株式会社
ガスセンサ
16日前
長崎県
形状計測方法
5日前
TDK株式会社
ガスセンサ
11日前
ダイハツ工業株式会社
移動支援装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ