TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068216
公報種別
公開特許公報(A)
公開日
2025-04-28
出願番号
2023177969
出願日
2023-10-16
発明の名称
協調作業システム、方法およびプログラム
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
B25J
19/06 20060101AFI20250421BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの非定常作業への導入を容易化する。
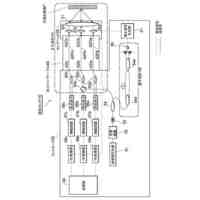
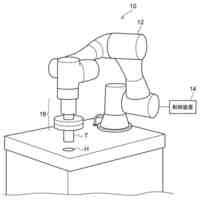
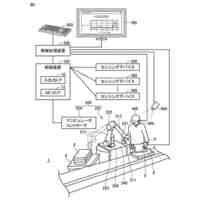
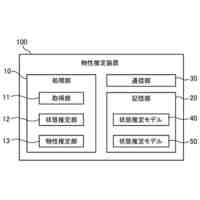
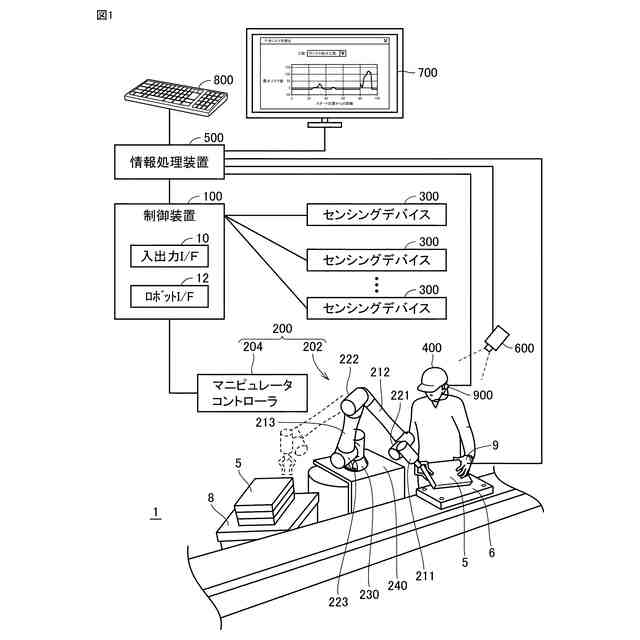
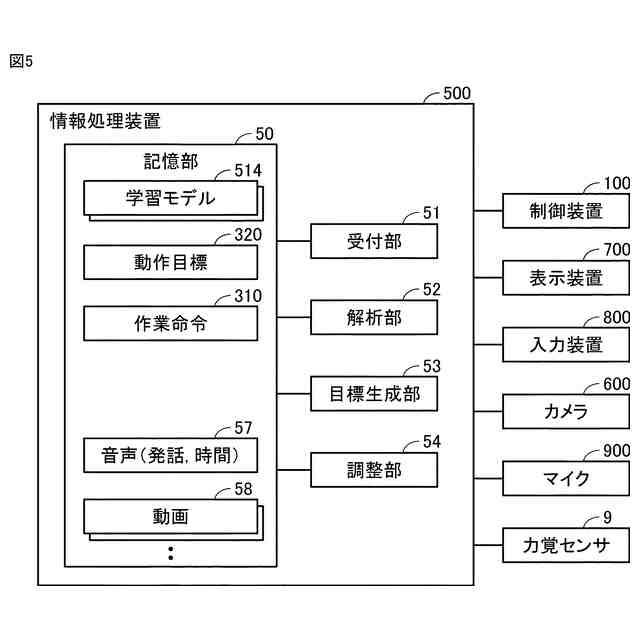
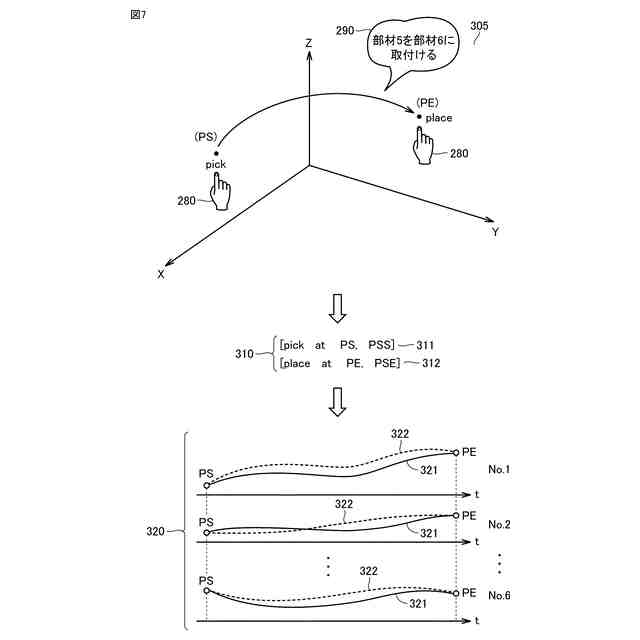
【解決手段】ロボットが作業者と協調して作業する協調作業システムは、作業の指示を受付ける受付部と、受付けた作業の指示を、ロボットの作業の命令に分解する解析部と、分解された作業の命令に基づき、ロボットの目標位置と目標姿勢とを含む動作目標を生成する目標生成部と、を備える。
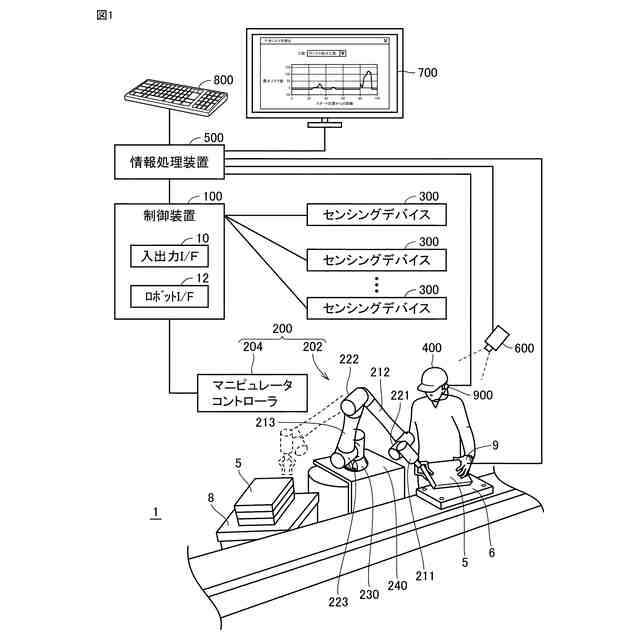
【選択図】図1
特許請求の範囲
【請求項1】
ロボットが作業者と協調して作業する協調作業システムであって、
作業の指示を受付ける受付部と、
受付けた前記作業の指示を、前記ロボットの作業の命令に分解する解析部と、
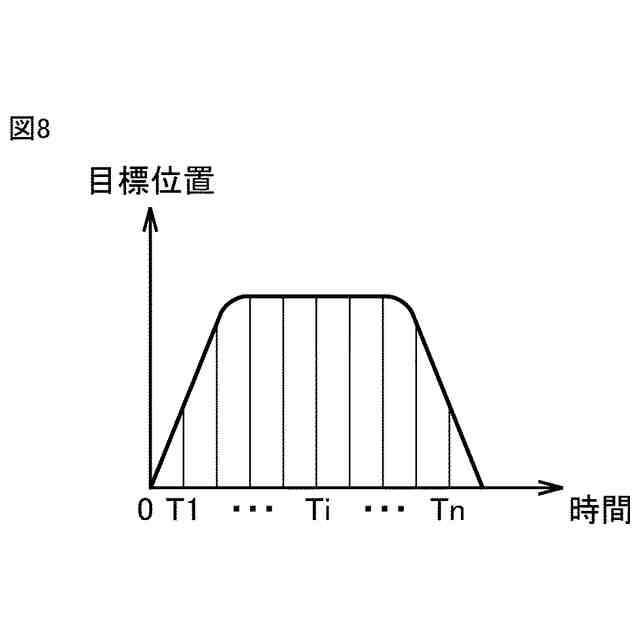
分解された作業の命令に基づき、前記ロボットの目標位置と目標姿勢とを含む動作目標を生成する目標生成部と、を備える、協調作業システム。
続きを表示(約 1,000 文字)
【請求項2】
前記作業の指示は、
前記作業者からの発話の音声に基づく指示、および、前記ロボットの周囲環境を示す情報に基づく指示を含む、請求項1に記載の協調作業システム。
【請求項3】
前記ロボットは、前記作業者と同一の作業エリアで動作し、
前記周囲環境を示す情報は、前記作業エリアに対応の空間を表す3次元画像を含む、請求項2に記載の協調作業システム。
【請求項4】
前記3次元画像は、前記作業エリアにおける前記作業者のジェスチャを表す画像を含む、請求項3に記載の協調作業システム。
【請求項5】
前記作業者のジェスチャは、前記作業エリアにおける前記作業に関連した対象の指さしを含む、請求項4に記載の協調作業システム。
【請求項6】
前記動作目標を格納する格納部と、
前記格納部の前記動作目標を、前記受付部によって受付けた指示に基づき調整する調整部とを、さらに備える、請求項1または2に記載の協調作業システム。
【請求項7】
前記作業は、前記ロボットが前記作業者と協調してワークを扱う作業を含み、
前記作業の指示は、前記ワークにかかる前記作業者の力に基づく指示を含む、請求項1または2に記載の協調作業システム。
【請求項8】
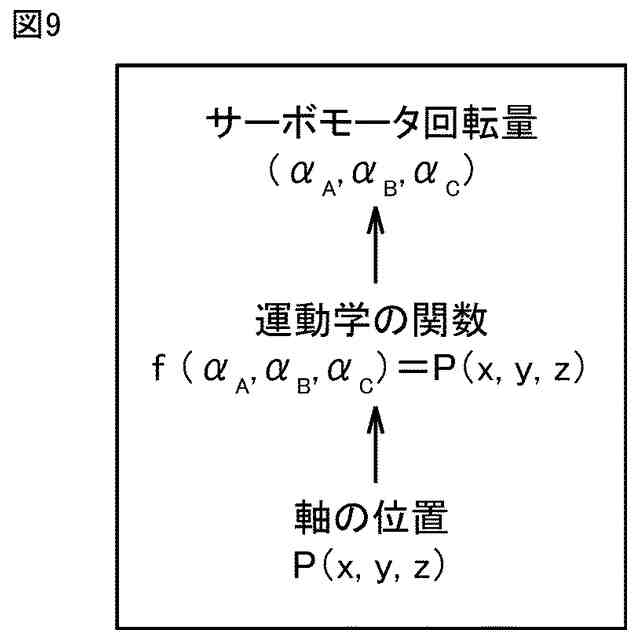
前記ロボットは、アームを含む可動部と、前記可動部を駆動する駆動部とを備え、
前記協調作業システムは、
前記動作目標に従って前記可動部が動作するよう、当該動作目標に基づき前記駆動部を制御する制御指令を生成する、請求項1または2に記載の協調作業システム。
【請求項9】
コンピュータが実施する方法であって、
ロボットが作業者と協調して実施する作業の指示を受付けること、
受付けた前記作業の指示を、前記ロボットの作業の命令に分解すること、および、
分解された作業の命令に基づき、前記ロボットの目標位置と目標姿勢とを含む動作目標を生成すること、を備える、方法。
【請求項10】
コンピュータに方法を実施させるためのプログラムであって、
前記方法は、
ロボットが作業者と協調して実施する作業の指示を受付けること、
受付けた前記作業の指示を、前記ロボットの作業の命令に分解すること、および、
分解された作業の命令に基づき、前記ロボットの目標位置と目標姿勢とを含む動作目標を生成すること、を備える、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットが作業者と協調して作業する協調作業システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
近年、FA(Factory Automation)分野において、人とロボットとが協調して作業する協調作業システムの開発が進められている。例えば、特開2023-87705号公報(特許文献1)は人とロボットとが協調して作業する協調作業システムを記載する。
【先行技術文献】
【特許文献】
【0003】
特開2023-87705号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
工場でワークの搬送、ワークの加工、加工されたワークの組立などの一連の作業は、作業手順(ワーク、作業の種類、作業の時間、作業の順番)が予め決められて変更されることはない、いわゆる定常作業に該当する。対照的に、非定常作業は、このような作業手順が固定ではなく、人によって適宜判断し変更される。
【0005】
昨今の労働者不足により、定常作業のみならず非定常作業を行う工程でも作業者が不足していた。定常作業に導入される場合、ロボットは決まった動作を繰り返すだけでよく、導入は比較的容易であるから、労働者不足を補うことが可能である。これに対して、非定常作業に、ロボットを導入する場合は、ロボットは人が判断した作業手順を実施する、すなわち人と協調して実施する必要があり、導入は現実的でなく、困難とされていた。特許文献1は、ロボットの非定常作業への導入は提案していない。
【0006】
本開示は、上記の課題に鑑みてなされたものであり、その目的は、ロボットの非定常作業への導入を容易化する協調作業システムを提供することである。
【課題を解決するための手段】
【0007】
この開示に係る協調作業システムは、ロボットが作業者と協調して作業する協調作業システムであって、作業の指示を受付ける受付部と、受付けた作業の指示を、ロボットの作業の命令に分解する解析部と、分解された作業の命令に基づき、ロボットの目標位置と目標姿勢とを含む動作目標を生成する目標生成部と、を備える。
【0008】
この開示によれば、作業者は、協調作業システムに作業指示を与えれば、協調作業システムに目標動作を生成させることができる。その結果、非定常作業にロボットを導入することが容易となる。
【0009】
上述の開示において、作業の指示は、作業者からの発話の音声に基づく指示、および、ロボットの周囲環境を示す情報に基づく指示を含む。
【0010】
この開示によれば、協調作業システムに対し、作業の指示を、発話と周囲環境を示す情報で与えることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
光電センサ
22日前
オムロン株式会社
電磁継電器
1日前
オムロン株式会社
電磁継電器
1日前
オムロン株式会社
スレーブ装置
4日前
オムロン株式会社
トリガスイッチ
今日
オムロン株式会社
トリガスイッチ
23日前
オムロン株式会社
モバイルロボット
22日前
オムロン株式会社
モバイルロボット
22日前
オムロン株式会社
スイッチング素子
23日前
オムロン株式会社
光干渉測距センサ
15日前
オムロン株式会社
回転装置及びマウス
4日前
オムロン株式会社
電力変換装置とその制御方法
24日前
オムロン株式会社
情報取得装置、及び自動改札機
4日前
オムロン株式会社
制御装置、方法、及びプログラム
17日前
オムロン株式会社
信号処理装置、及び信号処理方法
25日前
オムロン株式会社
情報処理システム、情報処理方法
22日前
オムロン株式会社
モデル生成方法及び推論プログラム
23日前
オムロン株式会社
表示装置およびこれを備えた展示装置
23日前
オムロン株式会社
表示装置およびこれを備えた展示装置
23日前
オムロン株式会社
多関節ロボット、及びモバイルロボット
22日前
オムロン株式会社
学習装置、操作情報変換装置及び学習方法
4日前
オムロン株式会社
協調作業システム、方法およびプログラム
4日前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
23日前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
23日前
オムロン株式会社
信号制御システム、およびステップアップ方法
8日前
オムロン株式会社
加熱炉、制御装置、制御プログラム、および制御方法
22日前
オムロン株式会社
状態推定装置、状態推定方法及び状態推定プログラム
22日前
オムロン株式会社
アノテーション支援装置及びアノテーション支援方法
28日前
オムロン株式会社
物品包装システム、自律走行ロボット、及びプログラム
22日前
オムロン株式会社
バーコードリーダーにおける画像処理パラメータの決定
22日前
オムロン株式会社
パワーコンディショナ
21日前
オムロン株式会社
スイッチ、スイッチアッセンブリ、操作装置および操作用装置
22日前
OMC株式会社
ロボット
15日前
川崎重工業株式会社
ハンド
1か月前
株式会社アイセイ
搬送装置
1か月前
株式会社クレスコ
補助吸着具
8日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ