TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068502
公報種別
公開特許公報(A)
公開日
2025-04-28
出願番号
2023178456
出願日
2023-10-16
発明の名称
作業機械および作業システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/26 20060101AFI20250421BHJP(水工;基礎;土砂の移送)
要約
【課題】機械本体の前後方向端部およびその周囲を撮像することが可能な作業機械および作業システムを提供する。
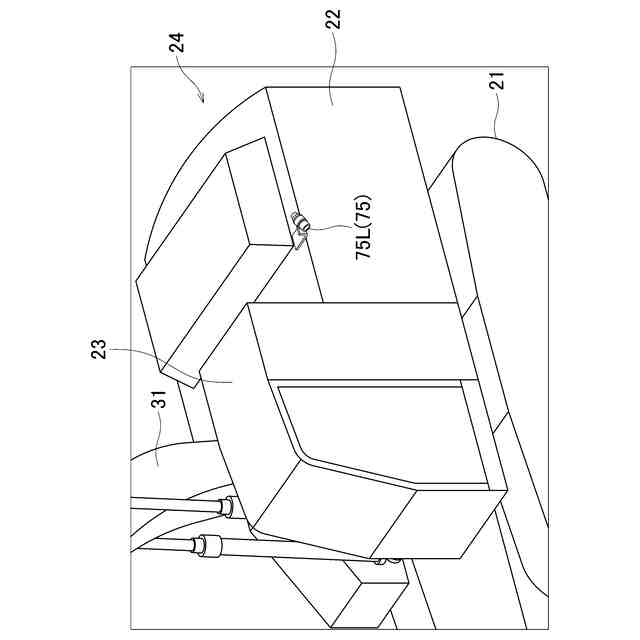
【解決手段】機械本体24と、機械本体24の左右方向端部に取り付けられ、機械本体24の前後方向の一方を向いた側部撮像装置75と、を有する。側部撮像装置75の撮像範囲には、機械本体24の前後方向端部の側面およびこの側面よりも外方の空間が含まれる。
【選択図】図6
特許請求の範囲
【請求項1】
機械本体と、
前記機械本体の左右方向端部に取り付けられ、前記機械本体の前後方向の一方を向いた撮像装置と、
を有し、
前記撮像装置の撮像範囲には、前記機械本体の前後方向端部の側面およびこの側面よりも外方の空間が含まれることを特徴とする作業機械。
続きを表示(約 840 文字)
【請求項2】
前記撮像装置は、前記機械本体の前記前後方向端部の側面およびこの側面よりも外方の空間が映り込むように撮像することを特徴とする請求項1に記載の作業機械。
【請求項3】
前記撮像装置は、前記機械本体の左右方向両端部にそれぞれ取り付けられていることを特徴とする請求項1に記載の作業機械。
【請求項4】
前記機械本体は、
下部走行体と、
前記下部走行体の上部に旋回可能に取り付けられた上部旋回体と、
を有し、
前記撮像装置は、前記上部旋回体に取り付けられていることを特徴とする請求項1に記載の作業機械。
【請求項5】
前記撮像装置の撮像範囲には、前記上部旋回体の下方の空間が含まれることを特徴とする請求項4に記載の作業機械。
【請求項6】
前記上部旋回体は、キャブを有し、
前記撮像装置は、前記キャブの上部に取り付けられており、
前記撮像装置の撮像範囲には、前記キャブの側面およびこの側面よりも外方の空間が含まれることを特徴とする請求項4に記載の作業機械。
【請求項7】
前記キャブは、搭乗口を有し、
前記撮像装置の撮像範囲には、前記搭乗口の側面およびこの側面より外方の空間が含まれることを特徴とする請求項6に記載の作業機械。
【請求項8】
前記機械本体に取り付けられ、前記機械本体の前方を撮像する前方撮像装置を有することを特徴とする請求項1に記載の作業機械。
【請求項9】
請求項1~8のいずれか1項に記載の作業機械と、
前記撮像装置が撮像した画像を表示する表示装置と、
を有することを特徴とする作業システム。
【請求項10】
前記作業機械を遠隔操作する遠隔操作手段を有することを特徴とする請求項9に記載の作業システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像装置を備えた作業機械および作業システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、上部旋回体に設けられ、上部旋回体の前方を撮影するカメラが開示されている。また、特許文献2には、上部旋回体に設けられ、上部旋回体の側方を撮影するカメラが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2006-219894号公報
特開2017-92908号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1,2のカメラは、いずれも、機械本体の前後方向端部およびその周囲を撮像することができない。よって、これらのカメラの映像からは、機械本体の前後方向端部およびその周囲の状況を確認することができない。機械本体の前後方向端部およびその周囲の状況が確認できれば、前後方向端部の周囲に存在する障害物の位置やクローラの向き、クローラの設置面などの把握が容易になる。そこで、機械本体の前後方向端部およびその周囲を撮像できることが望まれる。
【0005】
本発明の目的は、機械本体の前後方向端部およびその周囲を撮像することが可能な作業機械および作業システムを提供することである。
【課題を解決するための手段】
【0006】
本発明は、機械本体と、前記機械本体の左右方向端部に取り付けられ、前記機械本体の前後方向の一方を向いた撮像装置と、を有し、前記撮像装置の撮像範囲には、前記機械本体の前後方向端部の側面およびこの側面よりも外方の空間が含まれることを特徴とする。
【発明の効果】
【0007】
本発明によると、撮像装置の撮像範囲には、機械本体の前後方向端部の側面およびこの側面よりも外方の空間が含まれる。このように撮像装置の撮像範囲を設定することで、機械本体の前後方向端部の側面およびこの側面よりも外方の空間を含む映像を撮像することができる。これにより、機械本体の前後方向端部およびその周囲を撮像することができる。この撮像により、機械本体の前後方向端部の側面およびこの側面よりも外方の空間を含む映像を得ることができる。この映像から、作業機械を操作するオペレータや、作業機械を遠隔操作するオペレータは、クローラの向きなどを把握することができる場合がある。
【図面の簡単な説明】
【0008】
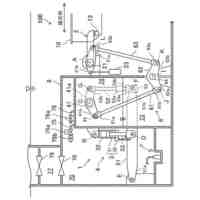
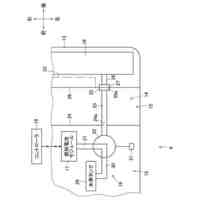
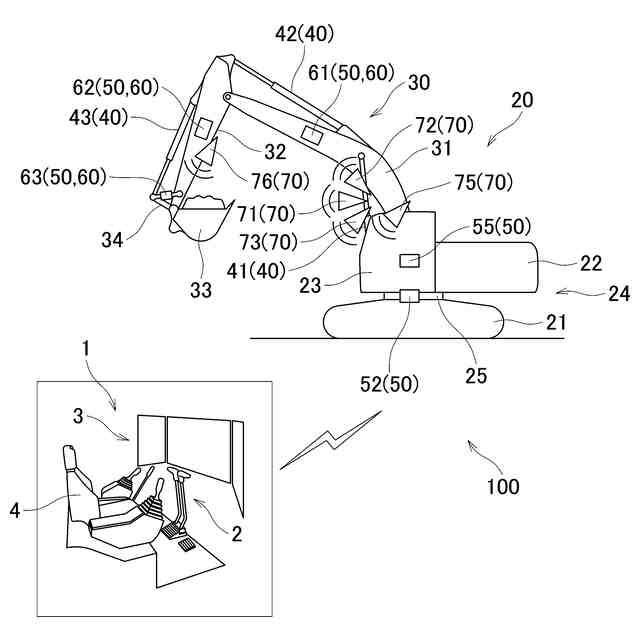
作業システムを示す図である。
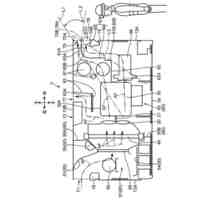
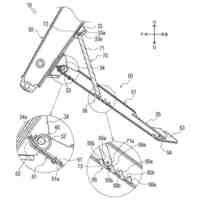
作業機械を斜め上から見た図である。
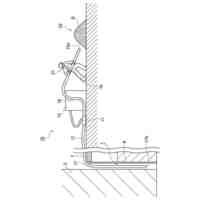
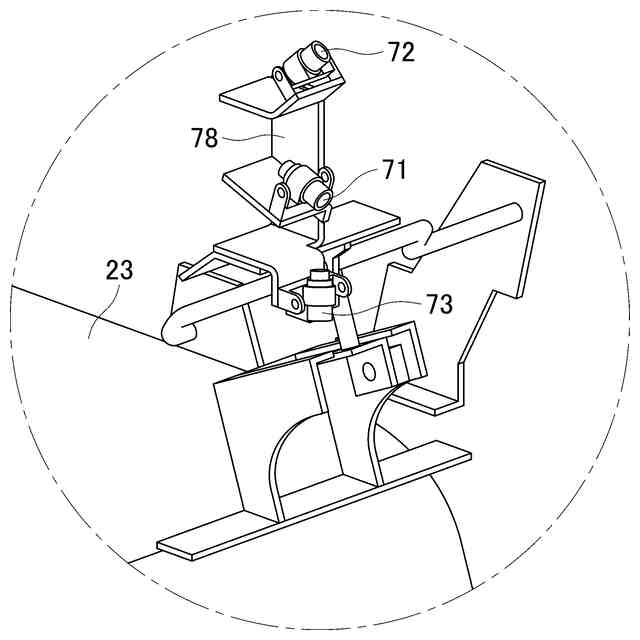
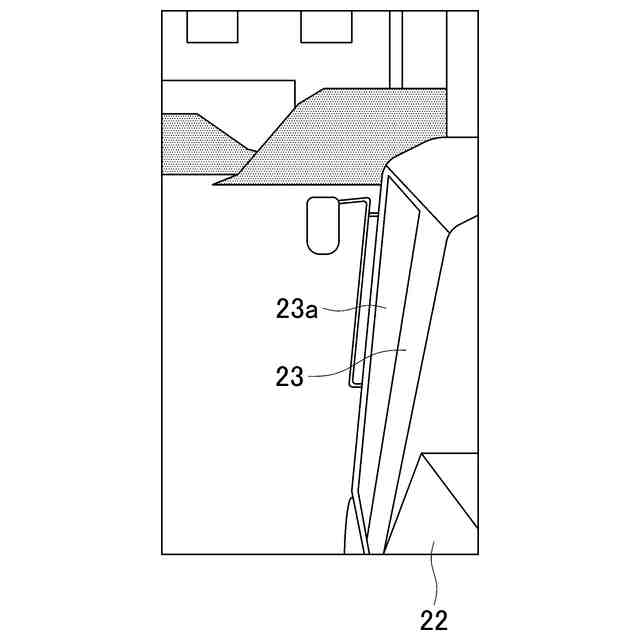
図2の要部Aの拡大図である。
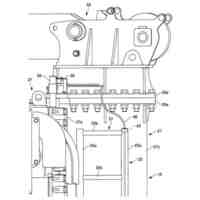
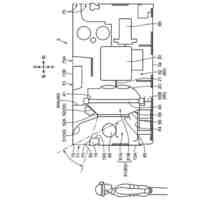
機械本体を斜め前方から見た斜視図である。
変形例における機械本体を斜め前方から見た斜視図である。
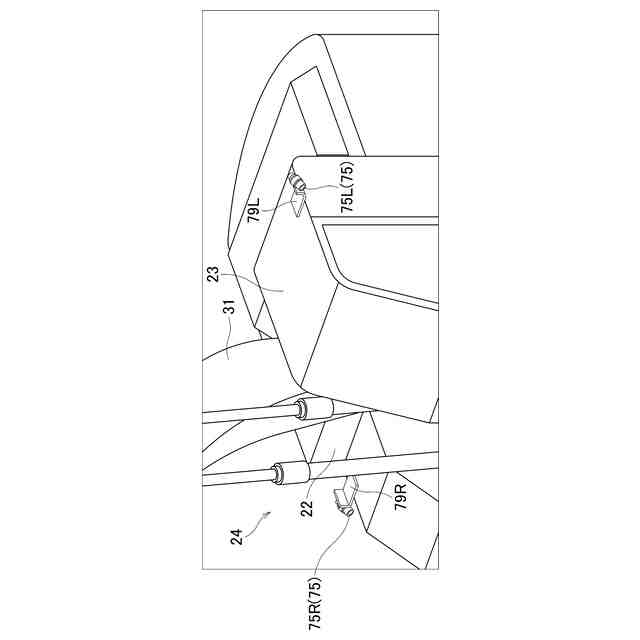
作業機械の右側面図である。
作業機械の左側面図である。
右側の側部撮像装置が撮像した映像を示す図である。
左側の側部撮像装置が撮像した映像を示す図である。
複数のモニタを示す図である。
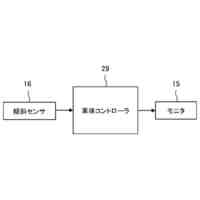
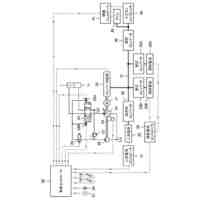
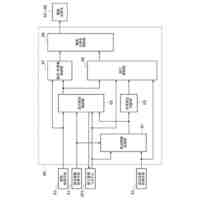
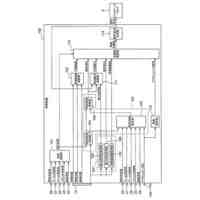
作業システムの機能構成図である。
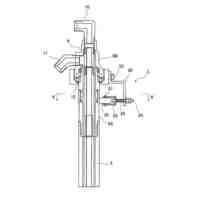
シミュレータが備えるモニタを示す図である。
図12の要部Bの拡大図である。
【発明を実施するための形態】
【0009】
以下、本発明の好適な実施の形態について、図面を参照しつつ説明する。
【0010】
(作業システムの構成)
本発明の実施形態による作業システム100は、作業システム100を示す図である図1に示すように、操作装置1と、作業機械20と、を有している。操作装置1は、作業機械20を操作するための装置であり、例えば遠隔操作装置(遠隔操作手段)を構成するコクピットである。オペレータは、操作装置1を操作することで、作業機械20を遠隔操作する。ここで、操作装置1の接続先となる作業機械20は、複数台であってよい。この場合、オペレータは、接続先となる作業機械20を切り換えることで、複数台の作業機械20を代わる代わる遠隔操作する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
18日前
個人
透過型堰堤
5日前
個人
構造物の検査方法
19日前
株式会社東部
多翼型鋼管杭
21日前
鹿島建設株式会社
鉄筋かご
3日前
個人
津波防御三段壁浮上システム。
11日前
株式会社大林組
基礎構造
25日前
カナデビア株式会社
起伏ゲート
19日前
中部電力株式会社
沈砂池
3日前
日本車輌製造株式会社
杭打機
21日前
株式会社クボタ
作業機
25日前
日立建機株式会社
建設機械
25日前
カナデビア株式会社
浮体構造体
11日前
日立建機株式会社
作業機械
25日前
コベルコ建機株式会社
作業機械
3日前
コベルコ建機株式会社
作業機械
3日前
コベルコ建機株式会社
作業機械
3日前
鹿島建設株式会社
埋戻し方法
11日前
東陽商事株式会社
スイベルの共回り防止装置
5日前
カナデビア株式会社
係留装置及びその制御方法
19日前
構法開発株式会社
埋込継手構造
18日前
プレス工業株式会社
建設機械のキャビン
3日前
株式会社SEELS
フェンダー用カバー部材
12日前
末広産業株式会社
水路用型枠ユニット
26日前
株式会社クボタ
フロントローダ及び作業車両
18日前
株式会社エンバイン
連結具及び盛土構造
11日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
作業機械
26日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
26日前
マックストン株式会社
シート敷設用アンカーブロック
4日前
コベルコ建機株式会社
作業機械
7日前
株式会社竹中工務店
柱脚構造
4日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ