TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068575
公報種別
公開特許公報(A)
公開日
2025-04-28
出願番号
2024113255
出願日
2024-07-16
発明の名称
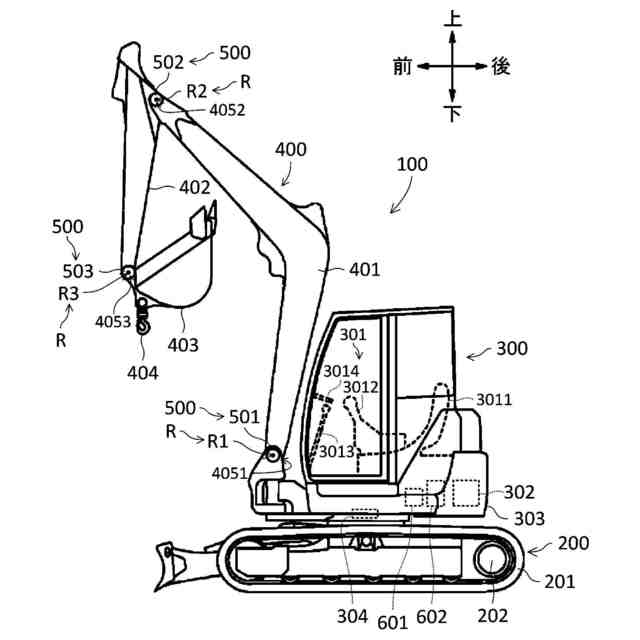
駆動装置、作業機械
出願人
ヤンマーホールディングス株式会社
代理人
弁理士法人 佐野特許事務所
主分類
B25J
17/00 20060101AFI20250421BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】駆動装置の緩衝装置の取り付け及び取り外しを容易に行う。
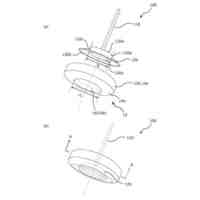
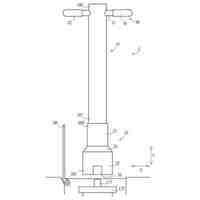
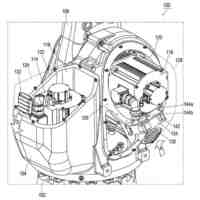
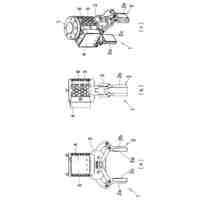
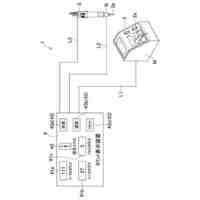
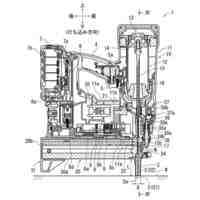
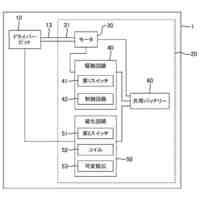
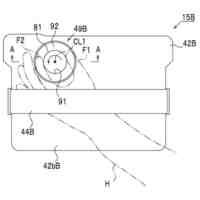
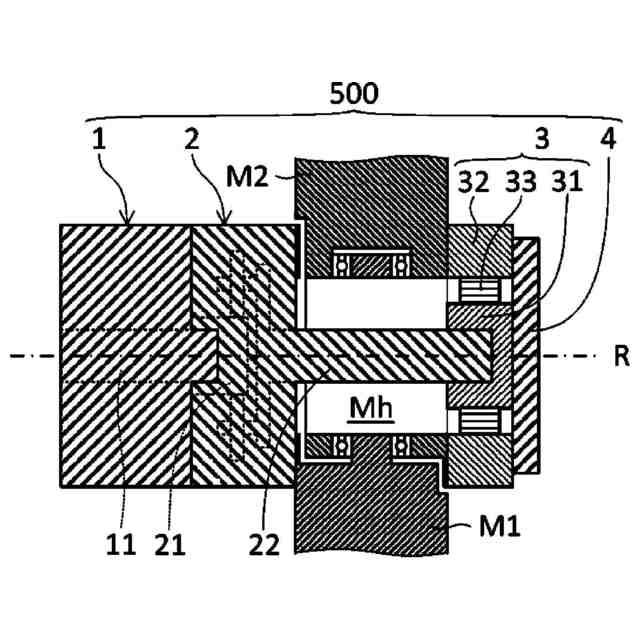
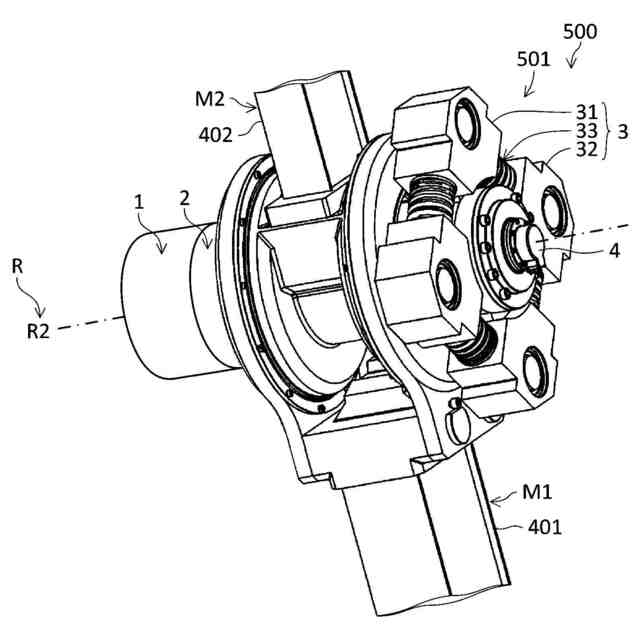
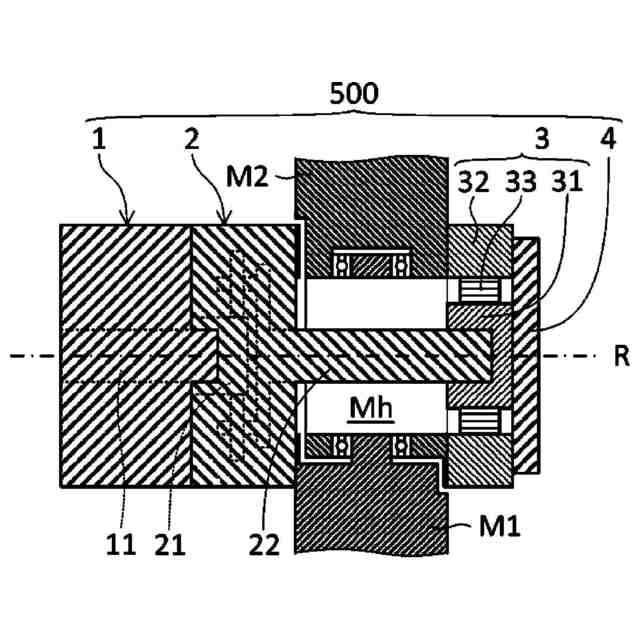
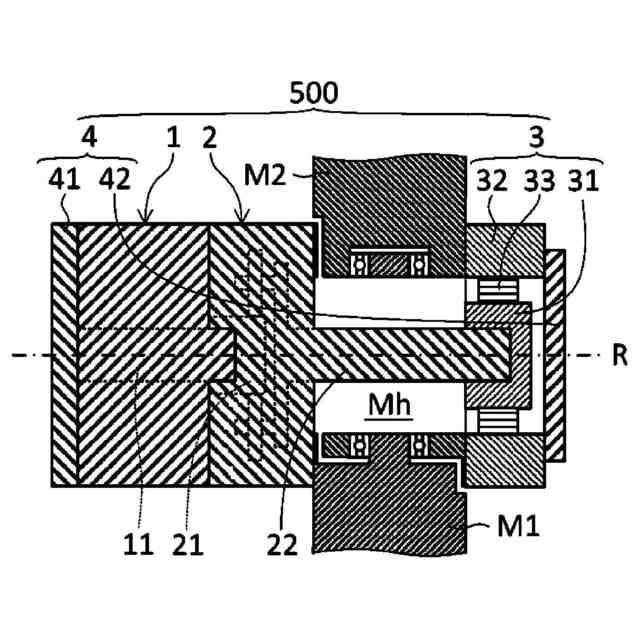
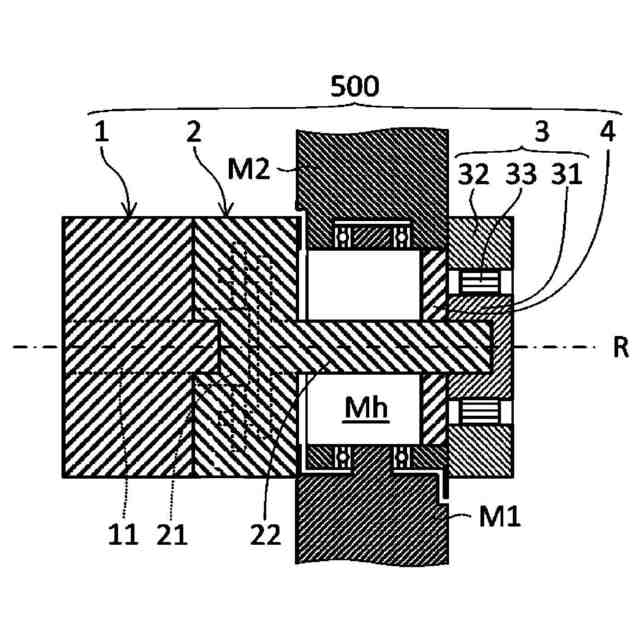
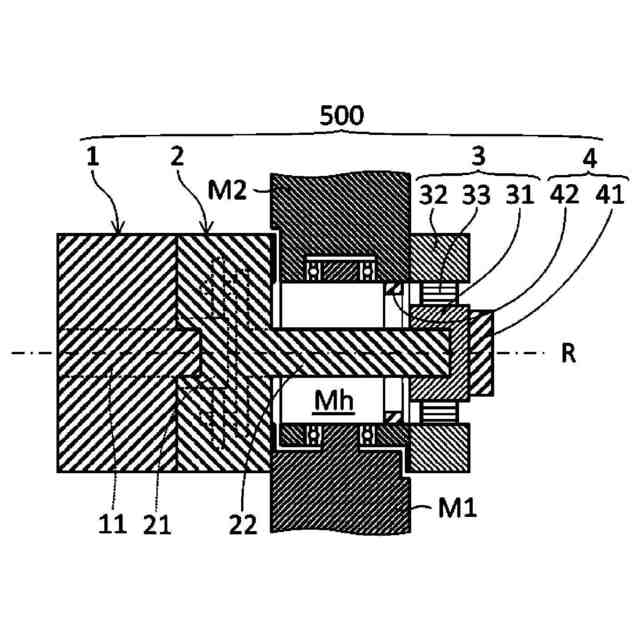
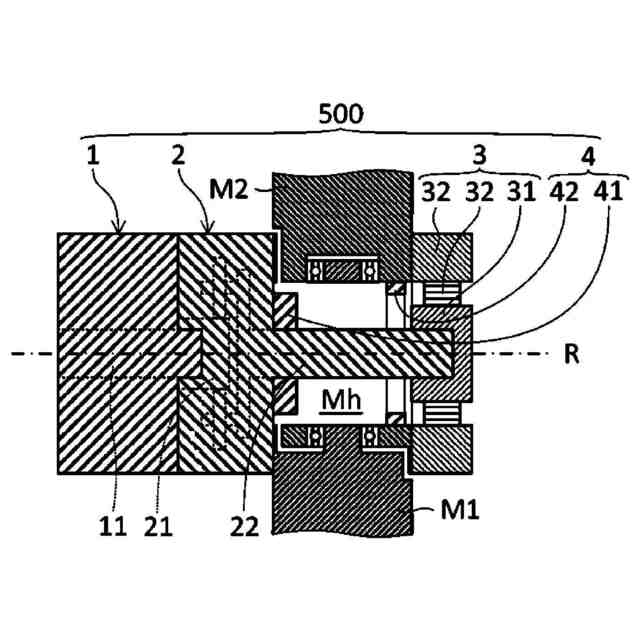
【解決手段】駆動対象M2を回動させる駆動装置500は、モータ部1と、モータ部1から入力されたトルクを減速する減速機2と、減速機2から入力されたトルクを弾性部33を経由して駆動対象M2に出力する緩衝装置3と、を備える。緩衝装置3の少なくとも一部は、駆動対象M2を挟んで、モータ部1及び減速機2とは反対側に配置される。
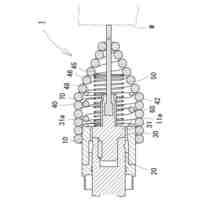
【選択図】図4
特許請求の範囲
【請求項1】
駆動対象を回動させる駆動装置であって、
モータ部と、
前記モータ部から入力されたトルクを減速する減速機と、
前記減速機から入力されたトルクを弾性部を経由して出力端部から前記駆動対象に出力する緩衝装置と、
を備え、
前記緩衝装置の少なくとも一部は、前記駆動対象を挟んで前記モータ部及び前記減速機とは反対側に配置される、駆動装置。
続きを表示(約 1,100 文字)
【請求項2】
前記緩衝装置の一部は、前記駆動対象に配置された貫通孔の内部に配置される、請求項1に記載の駆動装置。
【請求項3】
駆動対象を回動させる駆動装置であって、
モータ部と、
前記モータ部から入力されたトルクを減速する減速機と、
前記減速機から入力されたトルクを弾性部を経由して出力端部から前記駆動対象に出力する緩衝装置と、
を備え、
前記緩衝装置は、前記駆動対象に配置された貫通孔の内部に配置される、駆動装置。
【請求項4】
前記減速機の出力軸は、前記駆動対象に配置された貫通孔を通じて前記緩衝装置に接続され、
前記緩衝装置の前記出力端部は、前記駆動対象に接続される、請求項1に記載の駆動装置。
【請求項5】
駆動対象を回動させる駆動装置であって、
モータ部と、
前記モータ部のトルクを弾性部を経由して出力端部から出力する緩衝装置と、
前記緩衝装置から入力されたトルクを減速する第1減速機と、
を備え、
前記緩衝装置は、前記モータ部及び前記第1減速機間に配置され、
前記緩衝装置の前記出力端部は、前記第1減速機に接続され、
前記第1減速機の第1出力軸は、前記駆動対象に接続される、駆動装置。
【請求項6】
前記モータ部及び前記緩衝装置間に配置され、前記モータ部から入力されたトルクを減速する第2減速機を備え、
前記第2減速機の第2出力軸は、前記緩衝装置に接続される、請求項5に記載の駆動装置。
【請求項7】
前記緩衝装置の入力端部と前記緩衝装置の前記出力端部との相対位相を検出するためのセンサをさらに備える、請求項1から請求項6のいずれか1項に記載の駆動装置。
【請求項8】
前記入力端部及び前記出力端部は、前記駆動対象の回転軸を中心として回動可能であって、
前記センサは、前記入力端部及び前記出力端部の一方に対する他方の相対位相を検出する、請求項7に記載の駆動装置。
【請求項9】
前記入力端部及び前記出力端部は、前記駆動対象の回転軸を中心として回動可能であって、
前記センサは、
前記入力端部の第1位相を検出する第1センサと、
前記出力端部の第2位相を検出する第2センサと、
を有する、請求項7に記載の駆動装置。
【請求項10】
前記センサの少なくとも一部は、前記駆動対象の前記貫通孔内に配置される、請求項7に記載の駆動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動装置、作業機械に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、作業機械の関節部分に取り付けられて、精密な回転駆動を行うSEA(series elastic actuator)が知られている。従来のSEAでは、力制御と衝撃吸収のためにバネユニットは減速機と間接部分との間に取り付けられる。これはモータや減速機などへ出力側から不意の外力が加わった場合、破損してしまう恐れがあったためである。
【0003】
なお、本発明に関連する従来技術の一例として、特許文献1には、モータと、減速機と、弾性ばね装置と、負荷とがこの順で接続されたアクチュエータが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2014-140300号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
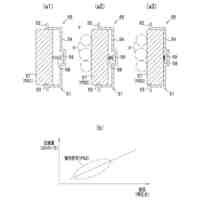
しかしながら、SEAの性能は、搭載する弾性要素のバネ特性(バネ定数等)によって制約される。そのため、状況に応じて、弾性要素を付け替える必要がある。但し、弾性要素を減速機と間接部分との間に配置すると、弾性要素の取り付け及び取り外しに手間がかかり、面倒であった。
【0006】
本発明は、上記の状況を鑑みて、駆動装置の緩衝装置の取り付け及び取り外しを容易に行うことを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明の一の態様による駆動装置は、駆動対象を回動させる。前記駆動装置は、モータ部と、減速機と、緩衝装置と、を備える。前記減速機は、前記モータ部から入力されたトルクを減速する。前記緩衝装置は、前記減速機から入力されたトルクを弾性部を経由して出力端部から前記駆動対象に出力する。前記緩衝装置の少なくとも一部は、前記駆動対象を挟んで前記モータ部及び前記減速機とは反対側に配置される。
【0008】
上記目的を達成するために本発明の他の一の態様による駆動装置は、駆動対象を回動させる。前記駆動装置は、モータ部と、減速機と、緩衝装置と、を備える。前記減速機は、前記モータ部から入力されたトルクを減速する。前記緩衝装置は、前記減速機から入力されたトルクを弾性部を経由して出力端部から前記駆動対象に出力する。前記緩衝装置は、前記駆動対象に配置された貫通孔の内部に配置される。
【0009】
上記目的を達成するために本発明の他の一の態様による駆動装置は、駆動対象を回動させる。前記駆動装置は、モータ部と、緩衝装置と、第1減速機と、を備える。前記緩衝装置は、前記モータ部のトルク を弾性部を経由して出力端部から出力する。前記第1減速機は、前記緩衝装置から入力されたトルクを減速する。前記緩衝装置は、前記モータ部及び前記第1減速機間に配置される。前記緩衝装置の前記出力端部は、前記第1減速機に接続される。前記第1減速機の前記第1出力軸は、前記駆動対象に接続される。
【0010】
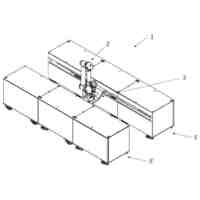
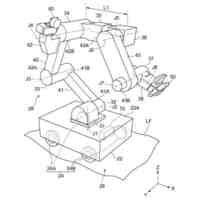
また、上記目的を達成するために本発明の一の態様による作業機械は、上述のいずれかの駆動装置を備える構成とされる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
15日前
株式会社クレスコ
補助吸着具
8日前
株式会社不二越
ロボット
今日
個人
深孔スリーブ駆動ロッド構造
28日前
株式会社エビス
腰ベルト用連結具
15日前
個人
バール
28日前
工機ホールディングス株式会社
作業機
23日前
株式会社イノウ
給油口キャップ用開閉具
1日前
川崎重工業株式会社
制動システム
今日
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社不二越
垂直多関節ロボット
1日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
アイホン株式会社
ネジ締めカウントシステム
2日前
株式会社デンソーウェーブ
ロボット制御システム
21日前
パナソニック株式会社
工具
1日前
パナソニック株式会社
工具
1日前
学校法人法政大学
装着型アシスト装置
25日前
アピュアン株式会社
エアー式衝撃工具
18日前
三菱電機株式会社
トルク締め個所検出システム
28日前
株式会社マキタ
打ち込み工具
2日前
高丸工業株式会社
ロボット操作システムの動作方法
28日前
株式会社マキタ
インパクト工具
16日前
株式会社マキタ
インパクト工具
16日前
SB C&S株式会社
治具セット
15日前
株式会社不二越
ロボットの教示システム及び教示方法
22日前
中国電力株式会社
電動ドライバー
22日前
オムロン株式会社
モバイルロボット
22日前
オムロン株式会社
モバイルロボット
22日前
JUKI株式会社
ハンドリング装置
1か月前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
18日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
22日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
22日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
22日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
22日前
シナノケンシ株式会社
把持装置
22日前
株式会社SUBARU
ボルトの電動締結工具
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ