TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025070106
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180190
出願日
2023-10-19
発明の名称
ロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250424BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
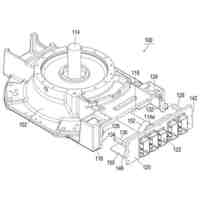
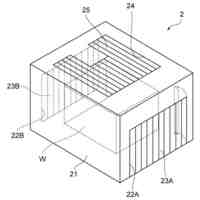
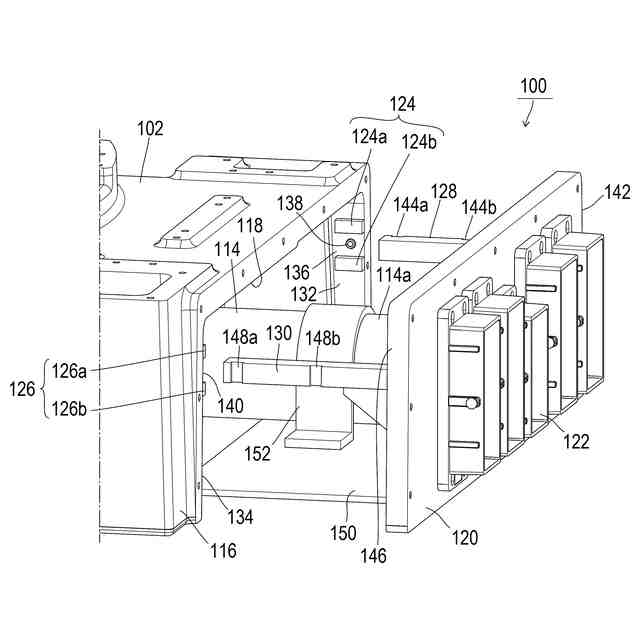
【課題】基台からパネルを取り外す作業でケーブルが破損することなく、作業性を向上させることができるロボットを提供する。
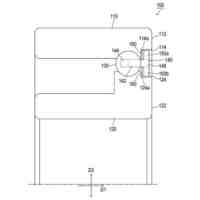
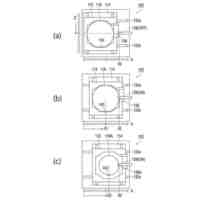
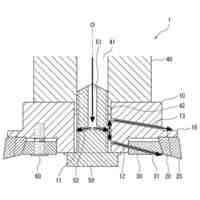
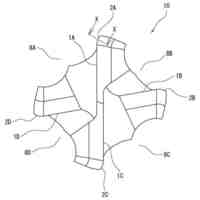
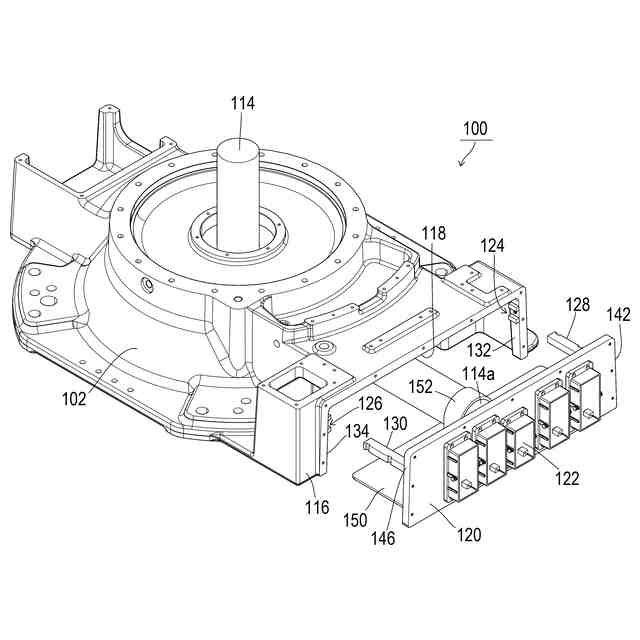
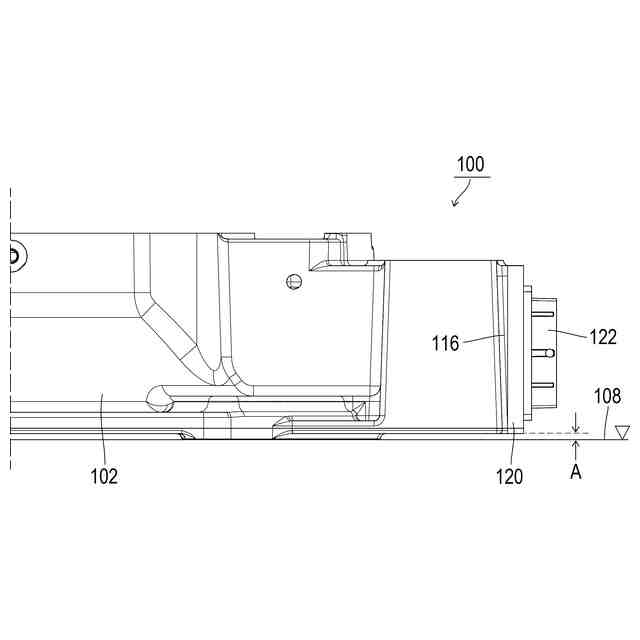
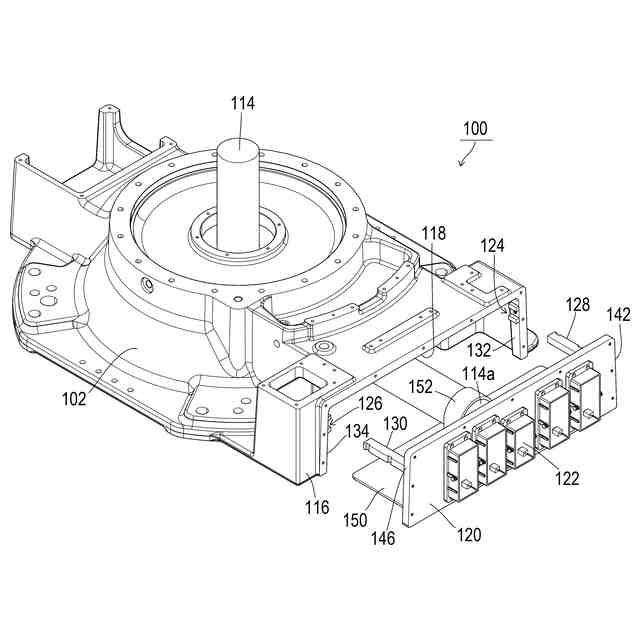
【解決手段】ロボット100は、基台102と、基台により支持された可動部103とを備えるロボットであって、基台の一面116に設けられた開口118と、開口を封止するパネル120と、パネルに設けられるとともに、基台の内部に配線されるケーブル114が電気的に接続されるコネクタ122と、開口の内側側面132、134に設けられたアウターレール124、126と、パネルの上側側面142、146に設けられアウターレールに案内されるインナーレール128、130と、を備えることを特徴とする。
【選択図】図3
特許請求の範囲
【請求項1】
基台と、前記基台により支持された可動部とを備えるロボットであって、
前記基台の一面に設けられた開口と、
前記開口を封止するパネルと、
前記パネルに設けられるとともに、前記基台の内部に配線されるケーブルが電気的に接続されるコネクタと、
前記開口の内側側面に設けられたアウターレールと、
前記パネルの側面に設けられ前記アウターレールに案内されるインナーレールと、を備えることを特徴とするロボット。
続きを表示(約 310 文字)
【請求項2】
前記アウターレールまたは前記インナーレールの一方に配置されたボールプランジャと、
前記アウターレールまたは前記インナーレールの他方に配置された凹部と、を備え、
前記パネルを前記開口から所定量引き出した位置で、前記ボールプランジャと前記凹部が嵌合することを特徴とする請求項1に記載のロボット。
【請求項3】
前記開口または前記パネルの一方に設けられた爪と、
前記開口または前記パネルの他方に設けられ前記爪と係合する段部と、を備え、
前記パネルを前記開口から所定量引き出した位置で、前記爪と前記段部とが係合することを特徴とする請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、基台の内部にケーブルが配線されるロボットに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
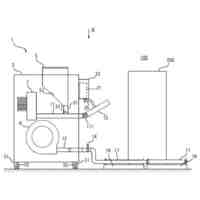
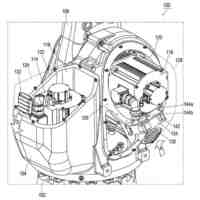
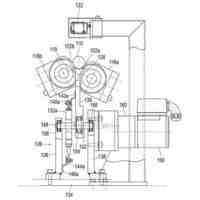
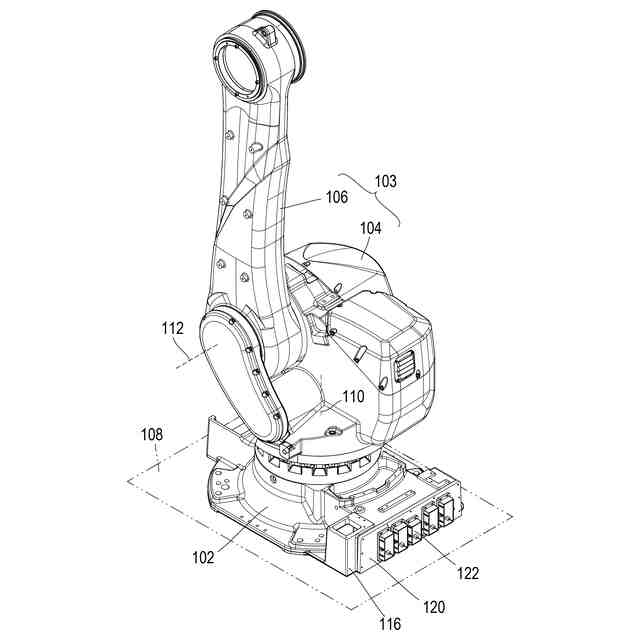
一例として産業用ロボットである垂直多関節ロボット(以下、単に「ロボット」と称する場合もある)は、汎用の目的に用いられる。ロボットは、床などに設置される基台と、基台に支持された可動部とを備える。可動部は、基台に対して水平方向に回動する胴部と、胴部に対して垂直方向に回動するアームとを含む。また胴部の内部には、胴部やアームを回動させる各モータなどが収容されている。このため、基台の内部には、各モータに信号や電力を送るケーブルが配線されている。
【0003】
特許文献1には、基台と可動部とを備えるロボットのケーブル接続構造が記載されている。このケーブル接続構造は、基台の側面に形成された第1開口と、第1開口に取付け可能である第1蓋部(パネル)と、可動部に接続された可動部ケーブルと、可動部ケーブルの先端に設けられた可動部コネクタとを備える。
【0004】
可動部コネクタは、基台の第1開口から外部に露出可能であり、さらに第1蓋部に設けられた導入部に電気的に接続可能となっている。また第1蓋部は、基板の第1開口に対してねじによって着脱自在に固定されている。このためケーブル接続構造では、基台の内部に挿通された可動部ケーブルが、基台の第1開口から取り外し自在な第1蓋部に対して可動部コネクタを介して着脱自在になっている。
【先行技術文献】
【特許文献】
【0005】
特開2023-81126号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし特許文献1のケーブル接続構造は、基台の第1開口に対して第1蓋部がねじで固定されているため、第1開口から第1蓋部を取り外す作業において、ねじを取り外す必要がある。このため、ねじを取り外す過程において重量物である第1蓋部の位置がずれてねじを回しにくくなってしまい、作業性が悪いという問題がある。また第1蓋部を引いたときにケーブルを必要以上に引き出してしまい、ケーブルが破損するおそれがある。
【0007】
本発明は、このような課題に鑑み、基台からパネルを取り外す作業でケーブルが破損することなく、作業性を向上させることができるロボットを提供することを目的としている。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明にかかるロボットの代表的な構成は、基台と、基台により支持された可動部とを備えるロボットであって、基台の一面に設けられた開口と、開口を封止するパネルと、パネルに設けられるとともに、基台の内部に配線されるケーブルが電気的に接続されるコネクタと、開口の内側側面に設けられたアウターレールと、パネルの側面に設けられアウターレールに案内されるインナーレールと、を備えることを特徴とする。
【0009】
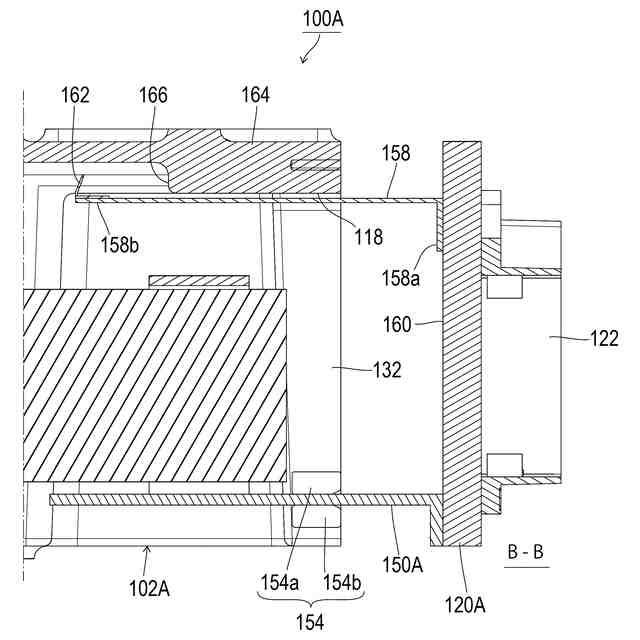
上記のアウターレールまたはインナーレールの一方に配置されたボールプランジャと、アウターレールまたはインナーレールの他方に配置された凹部と、を備え、パネルを開口から所定量引き出した位置で、ボールプランジャと凹部が嵌合することが好ましい。
【0010】
上記の開口またはパネルの一方に設けられた爪と、開口またはパネルの他方に設けられ爪と係合する段部と、を備え、パネルを開口から所定量引き出した位置で、爪と段部とが係合することが好ましい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
2か月前
株式会社不二越
蓄圧装置
2日前
株式会社不二越
ロボット
3か月前
株式会社不二越
射出成形機
2か月前
株式会社不二越
ソレノイド
1か月前
株式会社不二越
ソレノイド
2か月前
株式会社不二越
NC転造盤
24日前
株式会社不二越
搬送システム
2か月前
株式会社不二越
油圧システム
2か月前
株式会社不二越
X線測定装置
2か月前
株式会社不二越
油圧ユニット
2か月前
株式会社不二越
摩耗判定装置
1か月前
株式会社不二越
波形抽出装置
1か月前
株式会社不二越
駆動伝達機構
2か月前
株式会社不二越
ベーンポンプ
6日前
株式会社不二越
塵埃噴射装置
2か月前
株式会社不二越
X線測定装置
2か月前
株式会社不二越
保持器付き軸受
2か月前
株式会社不二越
電磁弁制御装置
3か月前
株式会社不二越
保持器付き軸受
4日前
株式会社不二越
圧力制御システム
3か月前
株式会社不二越
超硬合金製ドリル
3か月前
株式会社不二越
レースガイド保持器
2か月前
株式会社不二越
垂直多関節ロボット
3か月前
株式会社不二越
サーフェスブローチ盤
2か月前
株式会社不二越
協働ロボットシステム
2日前
株式会社不二越
クラッチアクチュエータ
2か月前
株式会社不二越
組立式スカイビングカッタ
1か月前
株式会社不二越
真空熱処理装置の排気構造
1か月前
株式会社不二越
製品選定装置及びプログラム
2日前
株式会社不二越
情報処理装置及びプログラム
27日前
株式会社不二越
スルーフィード式の加工装置
1か月前
株式会社不二越
複合加工機およびツーリング
1か月前
株式会社不二越
異常検知装置及びプログラム
2か月前
株式会社不二越
不等リードラジアスエンドミル
1か月前
株式会社不二越
シール付き軸受および軸受構造
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ