TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025070289
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180498
出願日
2023-10-19
発明の名称
制動システム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20250424BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】緊急停止時にロボットアーム及び移動装置を安定に制動できる。
【解決手段】制動システム100は、リンク31と前記リンク31を駆動する第1モータ33とを有するロボットアーム20と、シャトルバー113と前記シャトルバー113を駆動する第2モータ121とを有する搬送装置3と、前記第1モータ33及び前記第2モータ121を制御する制御装置4,5とを備え、前記制御装置4,5は、緊急停止時に、前記第1モータ33及び前記第2モータ121に協調してダイナミックブレーキを作用させる。
【選択図】図1
特許請求の範囲
【請求項1】
リンクと前記リンクを駆動するロボットモータとを有するロボットアームと、
移動体と前記移動体を駆動する移動体モータとを有する移動装置と、
前記ロボットモータ及び前記移動体モータを制御する制御装置とを備え、
前記制御装置は、緊急停止時に、前記ロボットモータ及び前記移動体モータに協調してダイナミックブレーキを作用させる制動システム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の制動システムにおいて、
前記制御装置は、前記ロボットモータ及び前記移動体モータにおいて発生する回生エネルギを消費する回生抵抗を含む回生回路を有する制動システム。
【請求項3】
請求項2に記載の制動システムにおいて、
前記回生回路は、
前記回生抵抗を前記ロボットモータ及び前記移動体モータに接続させる接続状態と、前記回生抵抗を前記ロボットモータ及び前記移動体モータから遮断させる非接続状態とに切り替え可能なスイッチと、
緊急停止時に前記スイッチを前記接続状態とするスイッチ制御器とを含む制動システム。
【請求項4】
請求項2に記載の制動システムにおいて、
前記回生抵抗は、前記ロボットモータの回生エネルギを消費するロボット回生抵抗と、前記移動体モータの回生エネルギを消費する移動体回生抵抗とを含む制動システム。
【請求項5】
請求項4に記載の制動システムにおいて、
前記制御装置は、前記ロボットモータを制御し前記ロボット回生抵抗を含むロボット制御装置と、前記移動体モータを制御し前記移動体回生抵抗を含む移動体制御装置とを含み、
前記ロボット制御装置と前記移動体制御装置は、緊急停止時に、前記ロボットモータ及び前記移動体モータに協調してダイナミックブレーキを作用させる制動システム。
【請求項6】
請求項5に記載の制動システムにおいて、
前記ロボット制御装置は、
電源から供給される交流電力を直流電力に変換するコンバータ回路と、
直流電力を交流電力に変換して、交流電力を前記ロボットモータに出力するインバータ回路とを有し、
前記ロボット回生抵抗は、前記コンバータ回路と前記インバータ回路との間で、前記コンバータ回路と前記インバータ回路とに対して並列に接続される制動システム。
【請求項7】
請求項5に記載の制動システムにおいて、
前記移動体制御装置は、
電源から供給される交流電力を直流電力に変換するコンバータ回路と、
直流電力を交流電力に変換して、交流電力を前記移動体モータに出力するインバータ回路とを有し、
前記移動体回生抵抗は、前記コンバータ回路と前記インバータ回路との間で、前記コンバータ回路と前記インバータ回路とに対して並列に接続される制動システム。
【請求項8】
請求項2に記載の制動システムにおいて、
前記制御装置は、前記ロボットモータ及び前記移動体モータに対して共通に設けられている制動システム。
【請求項9】
請求項8に記載の制動システムにおいて、
前記回生抵抗は、前記ロボットモータ及び前記移動体モータに対して共通に設けられている制動システム。
【請求項10】
請求項9に記載の制動システムにおいて、
前記制御装置は、
電源から供給される交流電力を直流電力に変換するコンバータ回路と、
直流電力を交流電力に変換して、交流電力を前記ロボットモータに出力するロボットインバータ回路と、
直流電力を交流電力に変換して、交流電力を前記移動体モータに出力し、前記ロボットインバータ回路に並列に接続される移動体インバータ回路とを有し、
前記回生抵抗は、前記コンバータ回路と前記ロボットインバータ回路及び前記移動体インバータ回路との間で、前記コンバータ回路と前記ロボットインバータ回路及び前記移動体インバータ回路とに対して並列に接続される制動システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、制動システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来より、モータで駆動するロボットアームにおいてモータを制動する制動システムが知られている。例えば、特許文献1に開示された制動システムでは、所定条件下においてモータにダイナミックブレーキを作用させている。
【先行技術文献】
【特許文献】
【0003】
特開2020-162193号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、前記ロボットアームを、ワークを搬送する搬送装置等の移動装置と共に使用することがある。この場合、緊急停止時においてロボットアームと移動装置が干渉しないようにロボットアーム及び移動装置を安定して制動することが望まれる。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、緊急停止時にロボットアーム及び移動装置を安定に制動することにある。
【課題を解決するための手段】
【0006】
ここに開示された制動システムは、リンクと前記リンクを駆動するロボットモータとを有するロボットアームと、移動体と前記移動体を駆動する移動体モータとを有する移動装置と、前記ロボットモータ及び前記移動体モータを制御する制御装置とを備え、前記制御装置は、緊急停止時に、前記ロボットモータ及び前記移動体モータに協調してダイナミックブレーキを作用させる。
【発明の効果】
【0007】
前記制動システムによれば、緊急停止時にロボットアーム及び移動装置を安定に制動できる。
【図面の簡単な説明】
【0008】
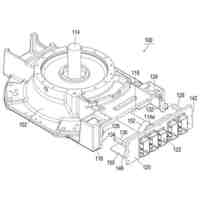
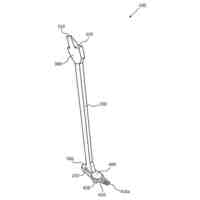
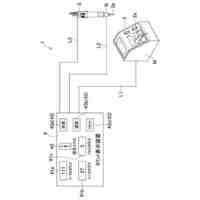
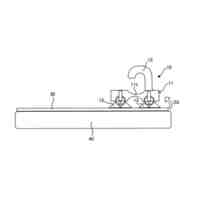
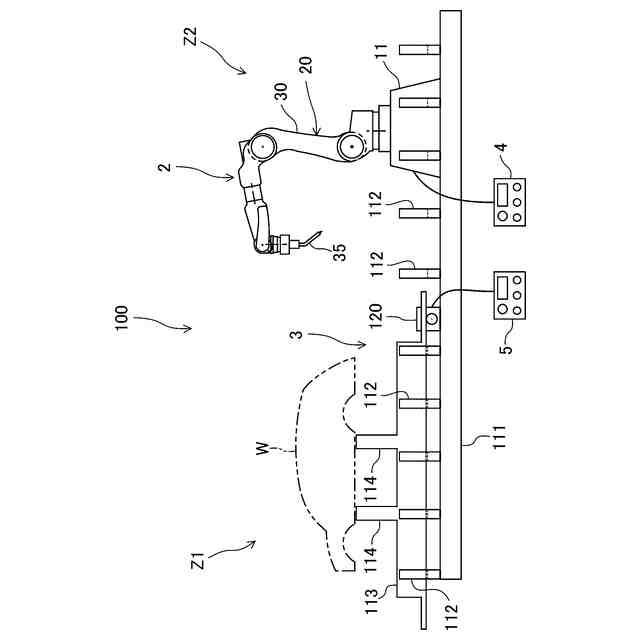
図1は、実施形態に係る制動システムを示す概略図である。
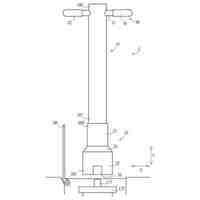
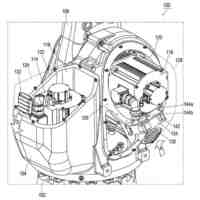
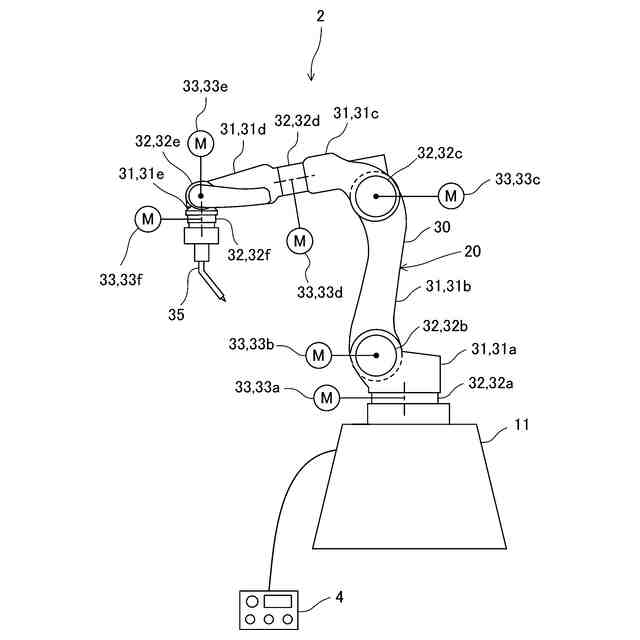
図2は、ロボットを示す概略図である。
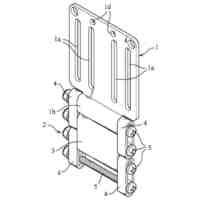
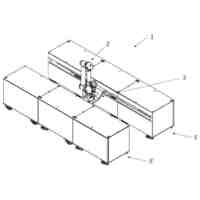
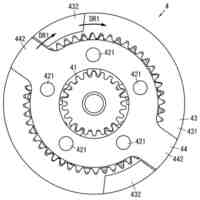
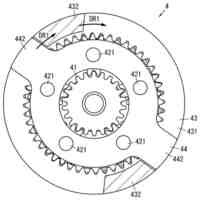
図3は、搬送装置を示す概略斜視図である。
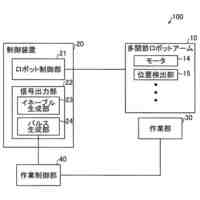
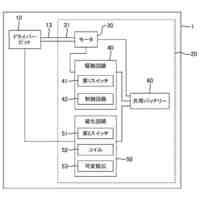
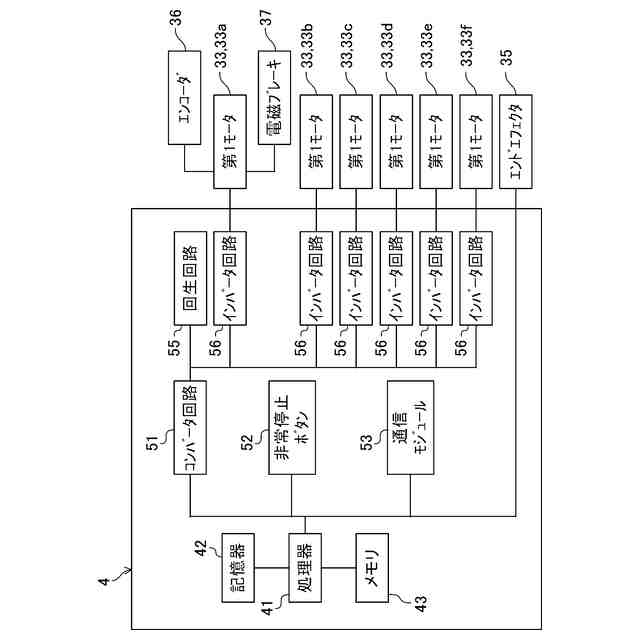
図4は、第1制御装置の構成を示すブロック図である。
図5は、第1制御装置のコンバータ回路、回生回路及びインバータ回路を示す回路図である。
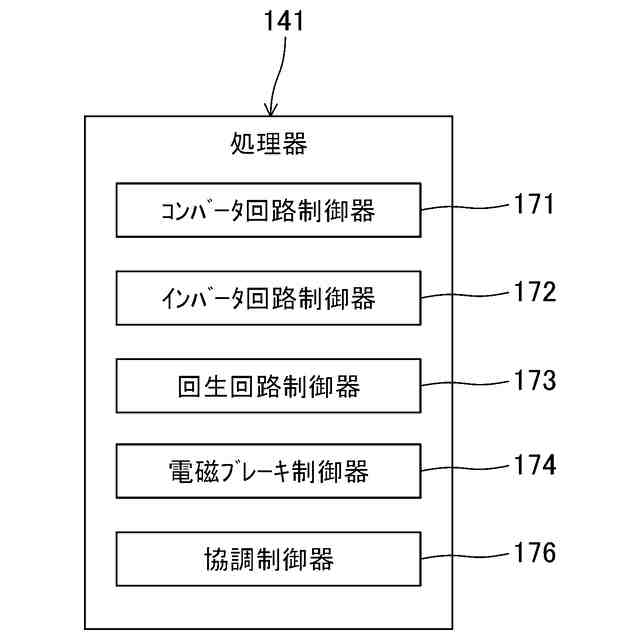
図6は、第1制御装置の処理器の機能を示すブロック図である。
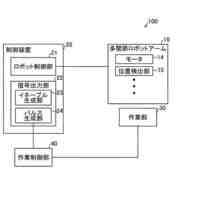
図7は、第2制御装置の構成を示すブロック図である。
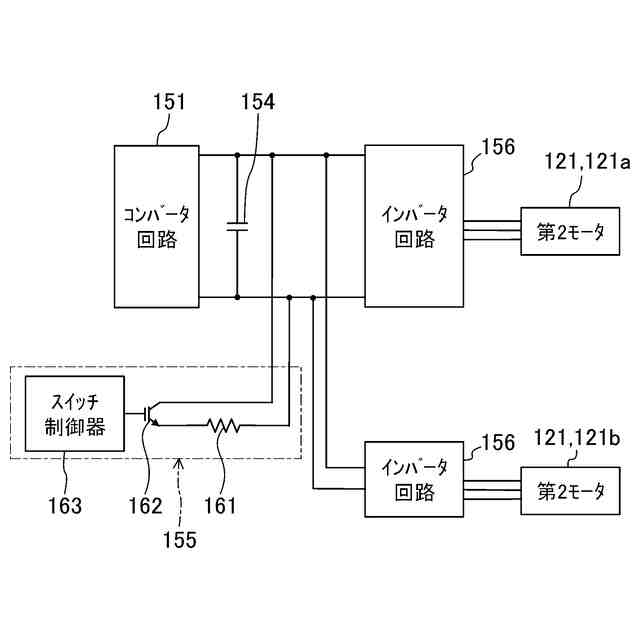
図8は、第2制御装置のコンバータ回路、回生回路及びインバータ回路を示す回路図である。
図9は、第2制御装置の処理器の機能を示すブロック図である。
図10は、第2制御装置による通常動作時における搬送装置の制御を示す概略的なタイムチャートである。
図11は、第2制御装置による緊急停止時における搬送装置の制御を示す概略的なタイムチャートである。
図12は、変形例1に係る制動システムの制御装置の構成を示すブロック図である。
図13は、制御装置のコンバータ回路、回生回路、第1インバータ回路及び第2インバータ回路を示す回路図である。
図14は、制御装置の処理器の機能を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。図1は、実施形態に係る制動システム100を示す概略図である。制動システム100は、ロボット2のロボットアーム20と搬送装置3と第1制御装置4と第2制御装置5とを備えている。制動システム100は、ロボット2のロボットアーム20及び搬送装置3を制動する。搬送装置3は、「移動装置」の一例である。第1制御装置4は、「ロボット制御装置」の一例である。第2制御装置5は、「移動体制御装置」の一例である。
【0010】
搬送装置3は、ワークWを搬送する。詳しくは、搬送装置3は、図1の左側の第1領域Z1においてワークWを搭載され、第1領域Z1から図1の右側の第2領域Z2にワークWを搬送する。ワークWは、この例では車体である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
基板搬送ロボットシステム
1日前
川崎重工業株式会社
散布物分布状態の表示処理装置、表示処理方法、及び、表示処理プログラム
1日前
川崎重工業株式会社
ロボットの動作方法およびプログラム
1日前
川崎重工業株式会社
ロボットシステム、ロボットおよびロボットの動作方法
1日前
OMC株式会社
ロボット
16日前
株式会社クレスコ
補助吸着具
9日前
株式会社不二越
ロボット
1日前
個人
深孔スリーブ駆動ロッド構造
29日前
株式会社不二越
ロボット操作装置
1か月前
株式会社エビス
腰ベルト用連結具
16日前
川崎重工業株式会社
ロボット
1か月前
株式会社デンソー
操縦桿
1か月前
個人
バール
29日前
工機ホールディングス株式会社
作業機
24日前
株式会社イノウ
給油口キャップ用開閉具
2日前
川崎重工業株式会社
制動システム
1日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
2日前
アイホン株式会社
ネジ締めカウントシステム
3日前
株式会社デンソーウェーブ
ロボット制御システム
22日前
パナソニック株式会社
工具
2日前
パナソニック株式会社
工具
2日前
学校法人法政大学
装着型アシスト装置
26日前
アピュアン株式会社
エアー式衝撃工具
19日前
株式会社マキタ
作業機
1か月前
三菱電機株式会社
トルク締め個所検出システム
29日前
株式会社マキタ
打ち込み工具
3日前
株式会社マキタ
インパクト工具
17日前
株式会社マキタ
インパクト工具
17日前
高丸工業株式会社
ロボット操作システムの動作方法
29日前
SB C&S株式会社
治具セット
16日前
中国電力株式会社
電動ドライバー
23日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
23日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
19日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ