TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025069403
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2025017979,2023179875
出願日
2025-02-05,2019-12-16
発明の名称
エンコーダ装置、駆動装置、ステージ装置、及びロボット装置
出願人
株式会社ニコン
代理人
個人
主分類
G01D
5/244 20060101AFI20250422BHJP(測定;試験)
要約
【課題】被検物の回転速度が速い場合でも、消費電力を抑制して検出結果の信頼性を向上させる。
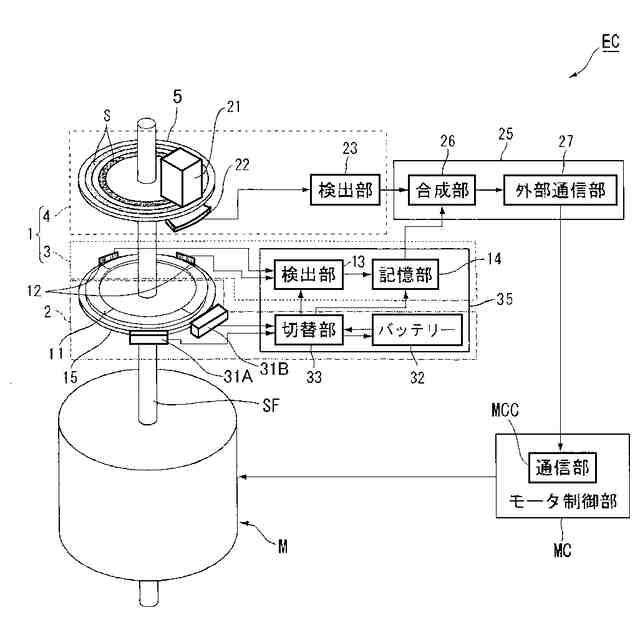
【解決手段】電源から電力が供給されて移動部の位置情報を検出する位置検出部と、前記移動部の移動によって移動する磁石と、前記磁石の移動による磁界の変化によって電気信号を発生する電気信号発生部と、前記電気信号により前記位置検出部に電力を供給する電力供給部と、を備え、前記位置検出部は、前記電源からの電力の供給が断たれると、前記電気信号の状態にかかわらず前記電力供給部から電力が供給され、前記位置情報の検出を行うエンコーダ装置が提供される。
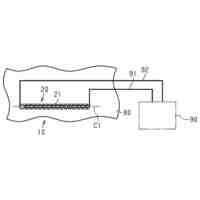
【選択図】図4
特許請求の範囲
【請求項1】
移動部の位置情報を検出する位置検出部と、
前記移動部の移動によって移動する磁石と、
前記磁石の移動による磁界の変化によって電気信号を発生する電気信号発生部と、
前記位置検出部から受信する制御信号によって前記電気信号を変化させ、前記制御信号に基づく電気信号を前記位置検出部へ出力する回路部と
を備え、
前記位置検出部は、
前記電気信号を受信する第1入力と、
前記電気信号とは異なる電力が供給される第2入力と、
を備える
エンコーダ装置。
続きを表示(約 860 文字)
【請求項2】
前記電気信号の電荷を蓄積する蓄積部を有し、
前記電気信号は、前記制御信号によって前記蓄積部の電荷を放電すると変化する請求項1に記載のエンコーダ装置。
【請求項3】
前記位置検出部は、前記第2入力の電位が低下した後の前記電気信号により初期化される請求項1に記載のエンコーダ装置。
【請求項4】
前記電気信号により、前記第2入力に前記電力を供給する電力供給部を備え、
前記回路部は、前記電力供給部の電位が基準値以上であると、前記第2入力の電位が低下した後の前記電気信号を前記第1入力へ出力する請求項3に記載のエンコーダ装置。
【請求項5】
前記回路部は、前記電力供給部の電位が上昇して所定時間経過すると前記第2入力の電位が低下した後の前記電気信号を前記位置検出部に出力する遅延部を含む請求項4に記載のエンコーダ装置。
【請求項6】
前記位置検出部は、前記移動部の位置情報の検出処理が終わると、前記制御信号を出力して前記電気信号を変化させる請求項1に記載のエンコーダ装置。
【請求項7】
前記電気信号は、前記移動部の移動によって間欠的に繰り返して出力される請求項1に記載のエンコーダ装置。
【請求項8】
前記移動部は回転軸を含み、
前記磁石は輪帯状又は扇形の部分を含み、
前記電気信号発生部は、前記磁石に沿って複数個配置される請求項1に記載のエンコーダ装置。
【請求項9】
前記位置検出部は、前記回転軸の1回転以内の角度位置情報を検出する角度検出部と、
前記位置情報として前記回転軸の多回転情報を検出する多回転情報検出部と、を備える
請求項8に記載のエンコーダ装置。
【請求項10】
前記第2入力に供給される前記電力は、前記制御信号の影響を受けない請求項1に記載のエンコーダ装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、エンコーダ装置、エンコーダ装置の使用方法、駆動装置、ステージ装置、及びロボット装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来のエンコーダ装置として、ウィーガントワイヤまたはその他の磁気発電素子を用いた自己発電手段によって無電源多回転検出回路を駆動することにより、無電源でも多回転を検出するものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2017-26397号公報
【発明の概要】
【0004】
本発明の態様によれば、移動部の位置情報を検出する位置検出部と、その移動部の移動によって移動する磁石と、その磁石の移動による磁界の変化によって電気信号を発生する電気信号発生部と、その位置検出部から受信する制御信号によってその電気信号を変化させ、その制御信号に基づく電気信号をその位置検出部へ出力する回路部とを備え、その位置検出部は、その電気信号を受信する第1入力と、その電気信号とは異なる電力が供給される第2入力と、を備えるエンコーダ装置が提供される。
また、本明細書には以下の発明の態様も記載されている。第1の態様によれば、移動部の位置情報を検出する位置検出部と、その移動部の移動によって移動する磁石と、その磁石の移動による磁界の変化によって電気信号を発生する電気信号発生部と、その位置検出部からの制御信号によって変化するその電気信号発生部の出力をその位置検出部へ出力する回路部とを備えるエンコーダ装置が提供される。
【0005】
第2の態様によれば、電源から電力が供給されて移動部の位置情報を検出する位置検出部と、その移動部の移動によって移動する磁石と、その磁石の移動による磁界の変化によって電気信号を発生する電気信号発生部と、その電気信号によりその位置検出部に電力を供給する電力供給部と、を備え、その位置検出部は、その電源からの電力の供給が断たれると、その電気信号の状態にかかわらずその電力供給部から電力が供給され、その位置情報の検出を行うエンコーダ装置が提供される。
【0006】
第3の態様によれば、上述の態様のエンコーダ装置と、その移動部に動力を供給する動力供給部と、を備える駆動装置が提供される。
第4の態様によれば、移動物体と、その移動物体を移動させる第3の態様の駆動装置と、を備えるステージ装置が提供される。
第5の態様によれば、第3の態様の駆動装置と、その駆動装置によって相対移動するアームと、を備えるロボット装置が提供される。
【0007】
第6の態様によれば、電源から電力が供給されて移動部の位置情報を検出する位置検出部と、その移動部の移動によって移動する磁石と、その磁石の移動による磁界の変化によって電気信号を発生する電気信号発生部と、その電気信号によりその位置検出部に電力を供給する電力供給部と、を備えるエンコーダ装置の使用方法であって、その位置検出部は、その電源からの電力の供給が断たれると、その電気信号の状態にかかわらずその電力供給部から電力が供給され、その位置情報の検出を行うことを含む使用方法が提供される。
【図面の簡単な説明】
【0008】
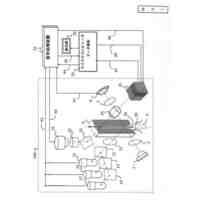
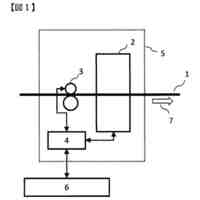
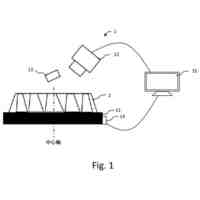
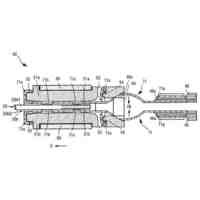
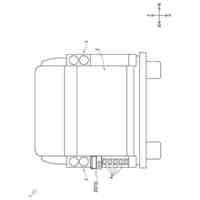
第1の実施形態に係るエンコーダ装置を示す図である。
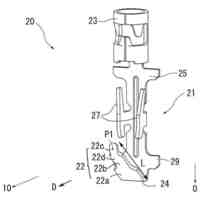
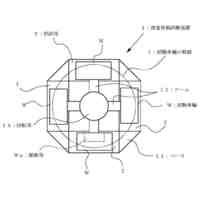
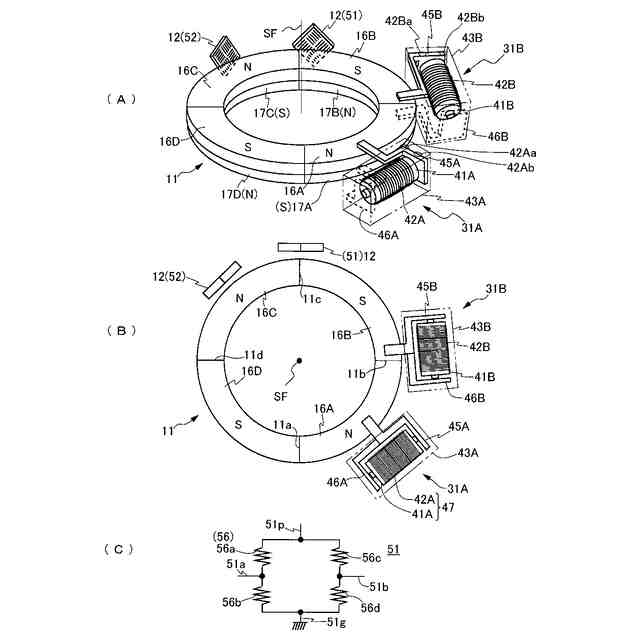
(A)は図1中の磁石、電気信号発生ユニット、及び磁気センサを示す斜視図、(B)は図2(A)の磁石等を示す平面図、(C)は図2(A)の磁気センサを示す回路図である。
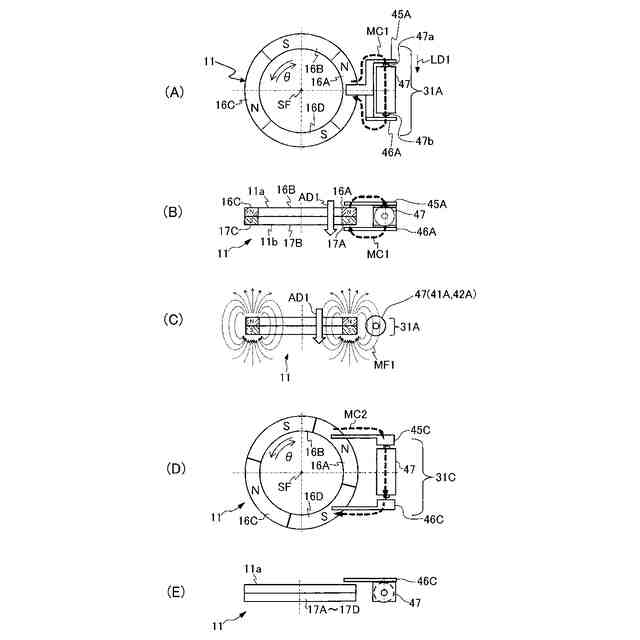
(A)は図2(A)の磁石及び電気信号発生ユニットを示す平面図、(B)及び(C)はそれぞれ図3(A)の断面図、(D)は変形例を示す平面図、(E)は図3(D)の側面図である。
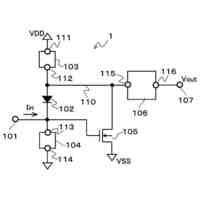
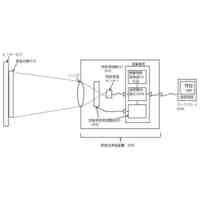
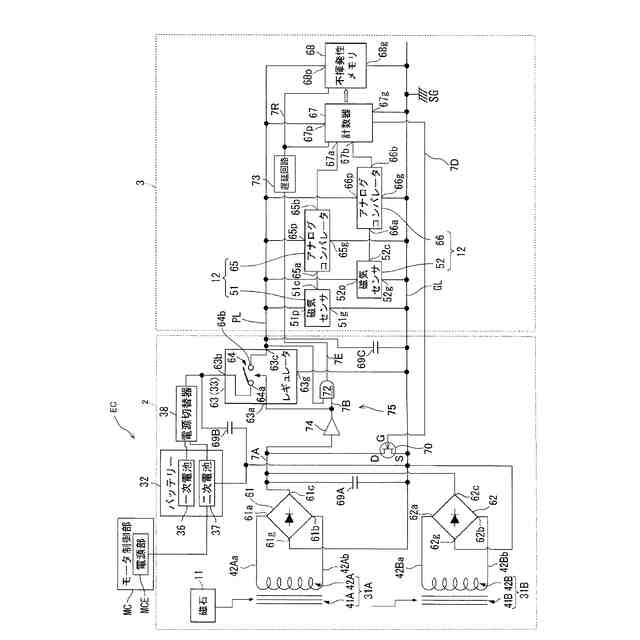
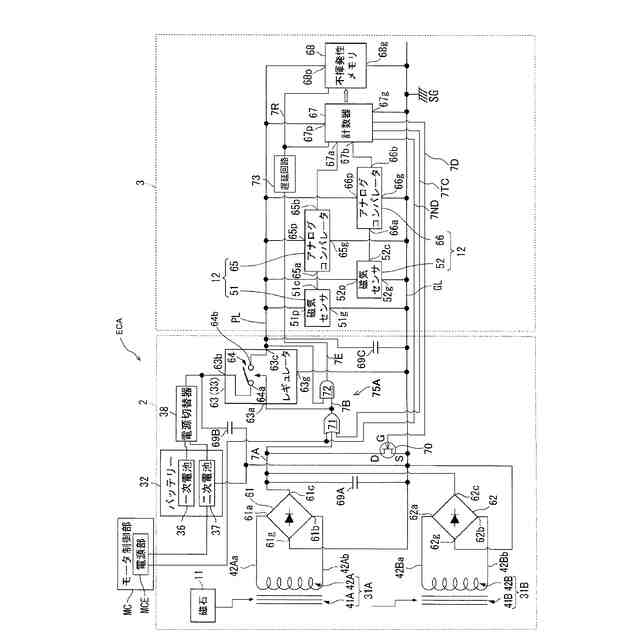
図1のエンコーダ装置の電力供給系及び多回転情報検出部の構成を示す図である。
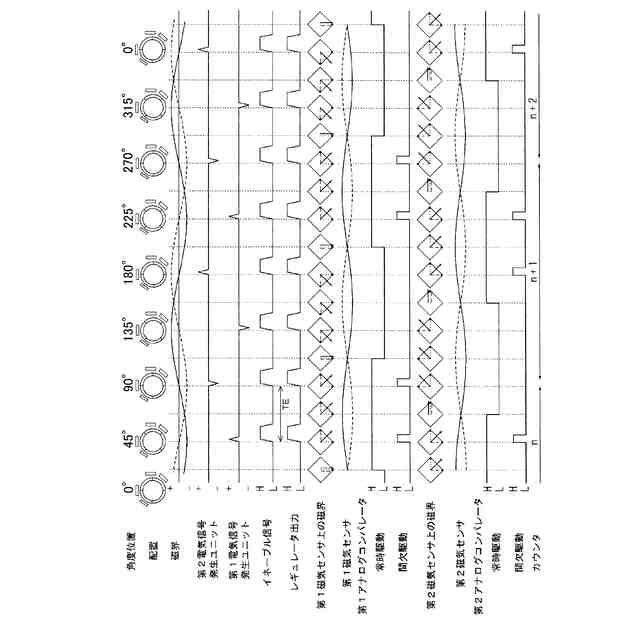
図1のエンコーダ装置の順回転時の動作を示す図である。
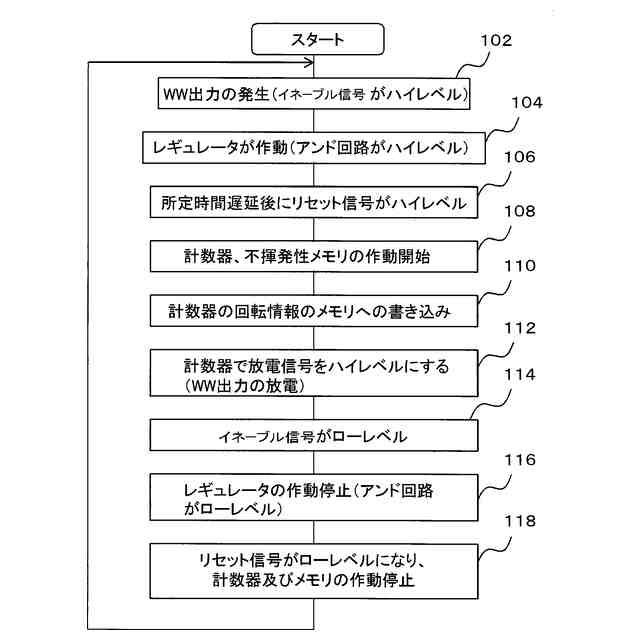
高速回転時の動作の一例を示すフローチャートである。
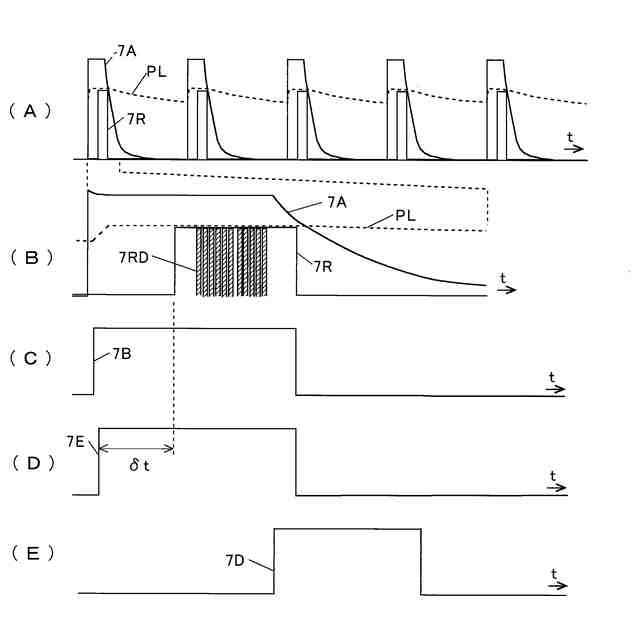
(A)、(B)、(C)、(D)、及び(E)は、それぞれ図6の動作に対応する所定の信号を示す図である。
第2の実施形態に係るエンコーダ装置の電力供給系及び多回転情報検出部の構成を示す図である。
第2の実施形態に係る電源オフ時の動作の一例を示すフローチャートである。
(A)、(B)、(C)、(D)、及び(E)は、それぞれ図9の動作に対応する所定の信号を示す図である。
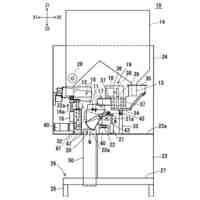
駆動装置の一例を示す図である。
ステージ装置の一例を示す図である。
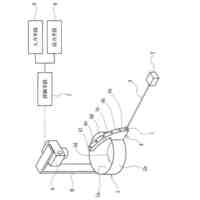
ロボット装置の一例を示す図である。
【発明を実施するための形態】
【0009】
[第1の実施形態]
第1の実施形態につき図1から図7を参照して説明する。図1は、本実施形態に係るエンコーダ装置ECを示す。図1において、エンコーダ装置ECは、モータM(動力供給部)の回転軸SF(移動部)の回転位置情報を検出する。回転軸SFは、例えばモータMのシャフト(回転子)であるが、モータMのシャフトに変速機などの動力伝達部を介して接続されるとともに負荷に接続される作用軸(出力軸)であってもよい。エンコーダ装置ECが検出した回転位置情報は、モータ制御部MCに供給される。モータ制御部MCは、エンコーダ装置ECから供給された回転位置情報を使って、モータMの回転(例えば、回転位置、回転速度など)を制御する。モータ制御部MCは、回転軸SFの回転を制御する。
【0010】
エンコーダ装置ECは、位置検出系(位置検出ユニット)1及び電力供給系(電力供給ユニット)2を備える。位置検出系1は、回転軸SFの回転位置情報を検出する。エンコーダ装置ECは、いわゆる多回転アブソリュートエンコーダであり、回転軸SFの回転の数を示す多回転情報、及び1回転未満の角度位置(回転角)を示す角度位置情報を含む回転位置情報を検出する。エンコーダ装置ECは、回転軸SFの多回転情報を検出する多回転情報検出部3、及び回転軸SFの角度位置を検出する角度検出部4を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
15日前
株式会社イシダ
計量装置
9日前
個人
アクセサリー型テスター
16日前
個人
準結晶の解析方法
1日前
日本精機株式会社
アセンブリ
1日前
株式会社豊田自動織機
自動走行体
今日
株式会社ミツトヨ
画像測定機
17日前
エイブリック株式会社
電流検出回路
29日前
東レ株式会社
シート状物の検査方法
1か月前
栄進化学株式会社
浸透探傷用濃縮液
22日前
株式会社テイエルブイ
振動検出装置
15日前
ダイハツ工業株式会社
試料セル
15日前
株式会社チノー
放射光測温装置
29日前
トヨタ自動車株式会社
検査装置
9日前
日本特殊陶業株式会社
ガスセンサ
29日前
GEE株式会社
光学特性測定装置
今日
トヨタ自動車株式会社
電気自動車
16日前
大和製衡株式会社
計量装置
22日前
株式会社 キョーワ
食品搬送装置
29日前
日本特殊陶業株式会社
ガスセンサ
29日前
日本特殊陶業株式会社
ガスセンサ
1日前
東ソー株式会社
簡易型液体クロマトグラフ
11日前
理研計器株式会社
ガス検出器
17日前
富士電機株式会社
エンコーダ
1か月前
株式会社熊谷組
計測システム
22日前
日本碍子株式会社
ガスセンサ
29日前
理研計器株式会社
ガス検出器
17日前
理研計器株式会社
ガス検出器
17日前
大成建設株式会社
画像表示システム
25日前
理研計器株式会社
ガス検出器
17日前
理研計器株式会社
ガス検出器
17日前
株式会社TISM
センサ部材
今日
株式会社ニコン
検出装置
15日前
株式会社 システムスクエア
検査装置
23日前
大和製衡株式会社
表示システム
7日前
リバークル株式会社
荷重移動試験装置
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ