TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025069514
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2023179272
出願日
2023-10-18
発明の名称
撮像システム及び撮像方法
出願人
株式会社リコー
代理人
インフォート弁理士法人
主分類
H04N
7/18 20060101AFI20250423BHJP(電気通信技術)
要約
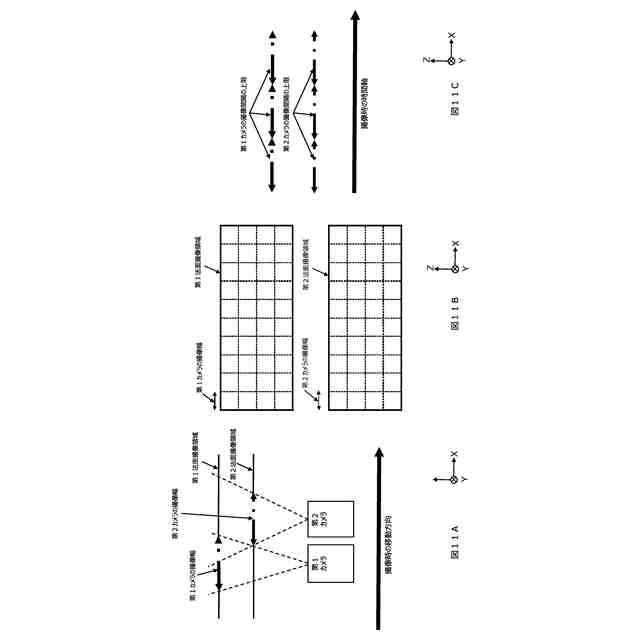
【課題】対象物における撮像距離が異なる領域を撮像する場合でも適切に撮像することを可能にする撮像システム及び撮像方法を提供する。
【解決手段】第2の撮像領域は、第1の撮像部及び第2の撮像部の撮像基準位置から移動方向と交差する方向の距離が、第1の撮像領域よりも近くである。第1の撮像部が第1の撮像領域を1回の撮像で撮像する際の移動方向における撮像範囲である撮像幅を第1の撮像幅、第2の撮像部が第2の撮像領域を1回の撮像で撮像する際の移動方向における撮像範囲である撮像幅を第2の撮像幅、と定義する。そして、第2の撮像幅が、第1の撮像幅の所定範囲内となるように、第1の撮像部における第1の撮像幅を決定するための第1の撮像パラメータと第2の撮像部における第2の撮像幅を決定するための第2の撮像パラメータとが異なっている。
【選択図】図11
特許請求の範囲
【請求項1】
第1の撮像部と第2の撮像部とを有する撮像システムであって、
前記撮像システムは移動装置に設置され、移動方向に移動しながら対象物を連続撮像するものであり、
前記第1の撮像部は、前記対象物の一部である第1の撮像領域を撮像し、
前記第2の撮像部は、前記対象物の一部である第2の撮像領域を撮像し、
前記第2の撮像領域は、前記第1の撮像部及び第2の撮像部の撮像基準位置から前記移動方向と交差する方向の距離が、前記第1の撮像領域よりも近くであり、
前記第1の撮像部が前記第1の撮像領域を1回の撮像で撮像する際の前記移動方向における撮像範囲である撮像幅を第1の撮像幅、前記第2の撮像部が前記第2の撮像領域を1回の撮像で撮像する際の前記移動方向における撮像範囲である撮像幅を第2の撮像幅、と定義すると、
前記第2の撮像幅が、前記第1の撮像幅の所定範囲内となるように、前記第1の撮像部における前記第1の撮像幅を決定するための第1の撮像パラメータと前記第2の撮像部における前記第2の撮像幅を決定するための第2の撮像パラメータとが異なっていること
を特徴とする撮像システム。
続きを表示(約 1,100 文字)
【請求項2】
前記第1の撮像パラメータは、前記第1の撮像部が有する第1の撮像センサの前記移動方向における1画素のサイズであり、
前記第2の撮像パラメータは、前記第2の撮像部が有する第2の撮像センサの前記移動方向における1画素のサイズであり、
前記第2の撮像センサの前記移動方向における1画素のサイズを、前記第1の撮像センサの前記移動方向における1画素のサイズよりも大きくすることで、前記第2の撮像幅を、前記第1の撮像幅の所定範囲内とすること
を特徴とする請求項1に記載の撮像システム。
【請求項3】
前記所定範囲内は、前記第2の撮像幅が、前記第1の撮像幅の50%から100%の範囲内であること
を特徴とする請求項1又は請求項2に記載の撮像システム。
【請求項4】
前記第1の撮像部と前記第2の撮像部は、前記移動方向に沿って一列に配置、又は前記移動方向と交差する前記移動装置の高さ方向に沿って一列に配置されること
を特徴とする請求項1又は請求項2に記載の撮像システム。
【請求項5】
前記第1、第2の撮像領域は、前記移動方向と前記対象物の高さ方向の異なる位置に配置されること
を特徴とする請求項1又は請求項2に記載の撮像システム。
【請求項6】
前記対象物は法面であり、
前記移動装置は車両であること
を特徴とする請求項1又は請求項2に記載の撮像システム。
【請求項7】
第1の撮像部と第2の撮像部とを有する撮像システムを用いた撮像方法であって、
前記撮像システムは移動装置に設置され、移動方向に移動しながら対象物を連続撮像するものであり、
前記第1の撮像部は、前記対象物の一部である第1の撮像領域を撮像し、
前記第2の撮像部は、前記対象物の一部である第2の撮像領域を撮像し、
前記第2の撮像領域は、前記第1の撮像部及び第2の撮像部の撮像基準位置から前記移動方向と交差する方向の距離が、前記第1の撮像領域よりも近くであり、
前記第1の撮像部が前記第1の撮像領域を1回の撮像で撮像する際の前記移動方向における撮像範囲である撮像幅を第1の撮像幅、前記第2の撮像部が前記第2の撮像領域を1回の撮像で撮像する際の前記移動方向における撮像範囲である撮像幅を第2の撮像幅、と定義すると、
前記第1の撮像部における前記第1の撮像幅を決定するための第1の撮像パラメータと前記第2の撮像部における前記第2の撮像幅を決定するための第2の撮像パラメータとを異ならせることで、前記第2の撮像幅が、前記第1の撮像幅の所定範囲内とすること
を特徴とする撮像方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像システム及び撮像方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
例えば、特許文献1には、法面の状態を外観観察に基づいて点検し、変状が認められたときにその状態および位置を記録する法面点検方法が記載されている。この法面点検方法では、天端あるいは法尻側方の平坦面を走行する車両から焦点距離の異なる複数のカメラにより法面を高さ方向に分割して法面での解像度をほぼ均一にして連続撮影するとともに、車両に搭載した位置計測手段により撮影位置を記録する。また、連続撮影した画像および撮影位置及び姿勢を利用した写真測量によって法面の3次元計測データを作成する。また、3次元計測データを利用し、法面に正対する方向に投影変換を行った直射投影画像に基づき法面の状態を外観観察する。そして、変状が認められたときにその状態および位置を特定する。
【先行技術文献】
【特許文献】
【0003】
特許第6498488号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、本発明者の鋭意研究によると、特許文献1の法面点検方法は、対象物における撮像距離が異なる領域を撮像する場合でも適切に撮像するという観点において、改良の余地がある。
【0005】
本発明は、以上の問題意識に基づいてなされたものであり、対象物における撮像距離が異なる領域を撮像する場合でも適切に撮像することを可能にする撮像システム及び撮像方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の撮像システムは、第1の撮像部と第2の撮像部とを有する撮像システムであって、前記撮像システムは移動装置に設置され、移動方向に移動しながら対象物を連続撮像するものであり、前記第1の撮像部は、前記対象物の一部である第1の撮像領域を撮像し、前記第2の撮像部は、前記対象物の一部である第2の撮像領域を撮像し、前記第2の撮像領域は、前記第1の撮像部及び第2の撮像部の撮像基準位置から前記移動方向と交差する方向の距離が、前記第1の撮像領域よりも近くであり、前記第1の撮像部が前記第1の撮像領域を1回の撮像で撮像する際の前記移動方向における撮像範囲である撮像幅を第1の撮像幅、前記第2の撮像部が前記第2の撮像領域を1回の撮像で撮像する際の前記移動方向における撮像範囲である撮像幅を第2の撮像幅、と定義すると、前記第2の撮像幅が、前記第1の撮像幅の所定範囲内となるように、前記第1の撮像部における前記第1の撮像幅を決定するための第1の撮像パラメータと前記第2の撮像部における前記第2の撮像幅を決定するための第2の撮像パラメータとが異なっていることを特徴とする。
【発明の効果】
【0007】
本発明によれば、対象物における撮像距離が異なる領域を撮像する場合でも適切に撮像することを可能にする撮像システム及び撮像方法を提供することができる。
【図面の簡単な説明】
【0008】
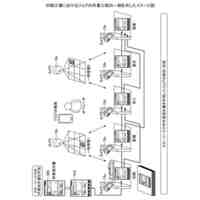
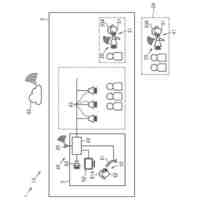
状態検査システムの全体構成の一例を示す図である。
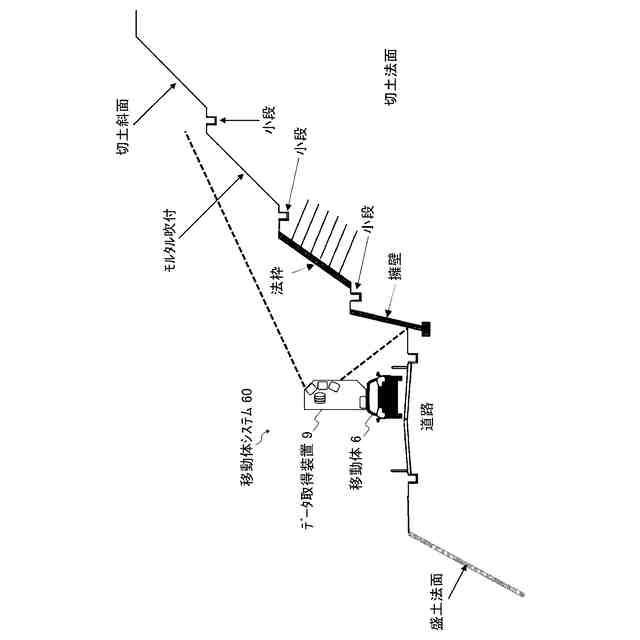
状態検査システムを用いて法面状態を検査する様子の一例を示す図である。
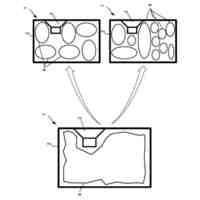
法面の状態の一例を示す図である。
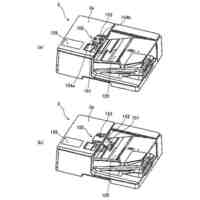
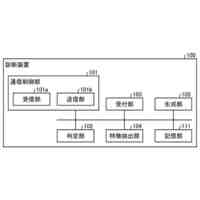
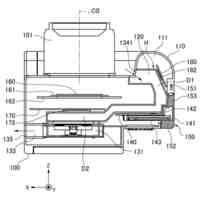
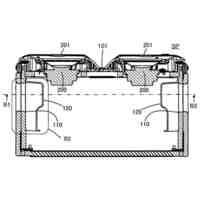
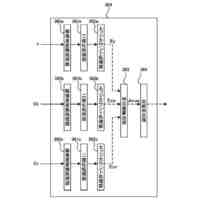
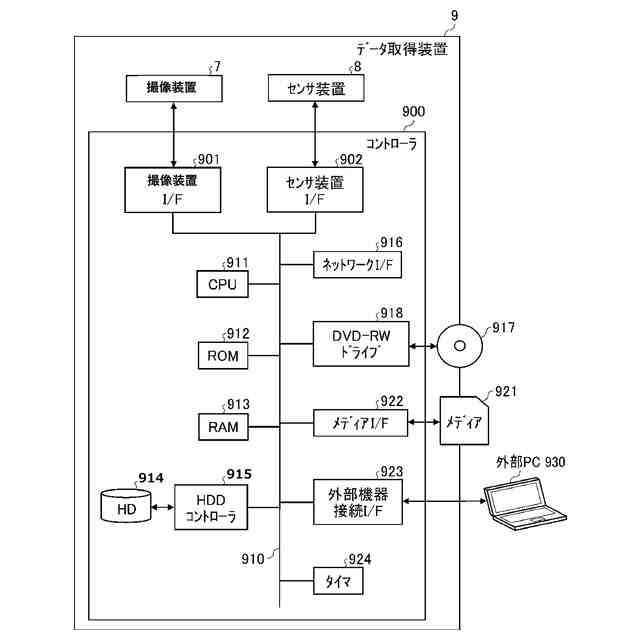
データ取得装置のハードウエア構成の一例を示す図である。
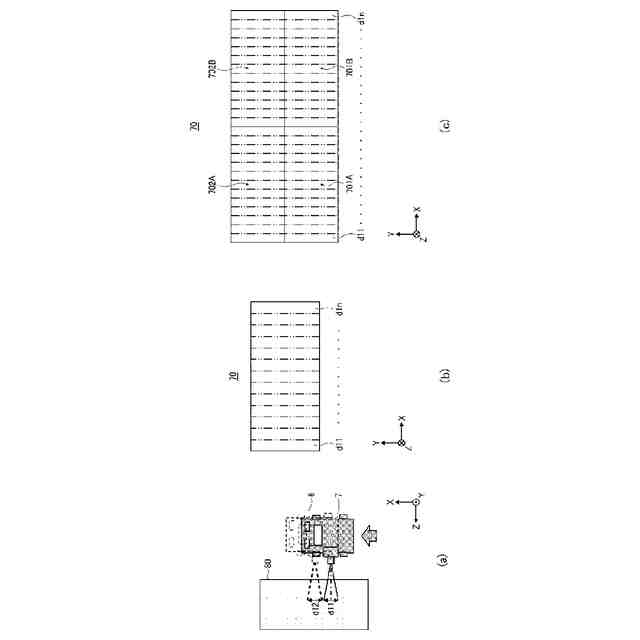
移動体システムによって取得される撮像画像について説明するための図である。
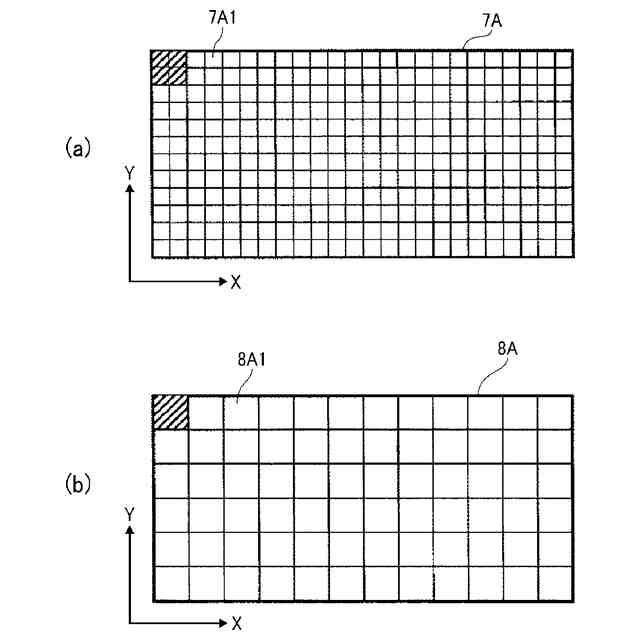
撮像画像と測距画像の説明図である。
複数の撮像領域の説明図である。
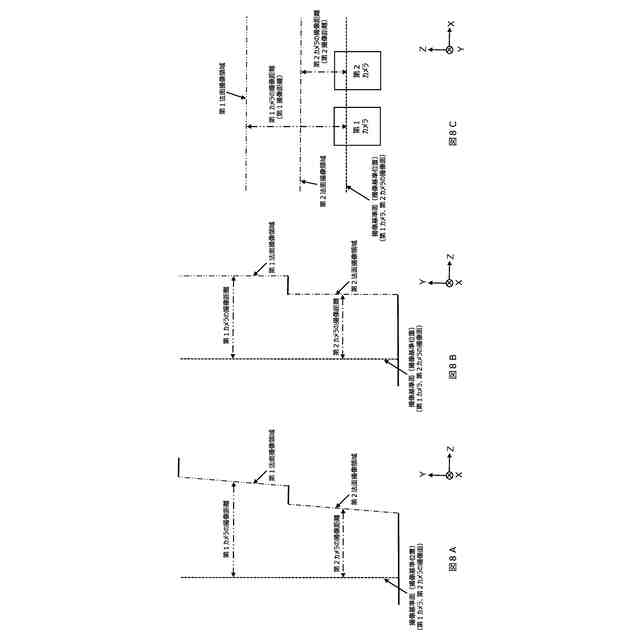
第1カメラによる第1法面撮像領域の撮像距離と第2カメラによる第2法面撮像領域の撮像距離との違いを模式的に描いた図である。
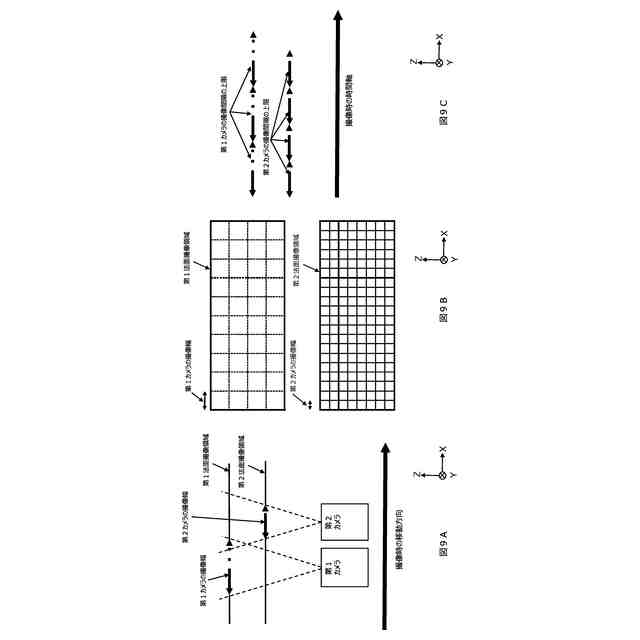
第1カメラと第2カメラが同一仕様の場合における撮像の概念図である。
本発明の前提となる焦点距離、撮像センサのサイズ、撮像幅の関係を示す図である。
本実施形態の第1カメラと第2カメラにおける撮像の概念図である。
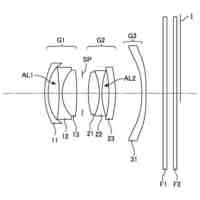
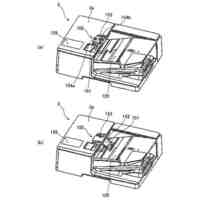
数値実施例1の撮像システムを示す図である。
撮像部(カメラ)による撮像パラメータを視覚的に理解するための図である。
数値実施例1における第1カメラと第2カメラによる撮像パラメータを示す図である。
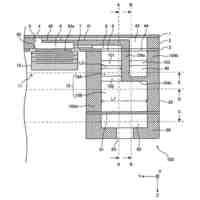
ラインセンサ(撮像センサ)の構造を描いた模式図である。
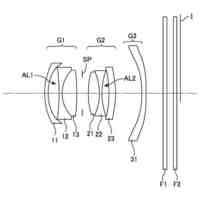
数値実施例3の撮像システムを示す図である。
数値実施例3における第1カメラと第2カメラ(第2Xカメラと第2Yカメラ)による撮像パラメータを示す図である。
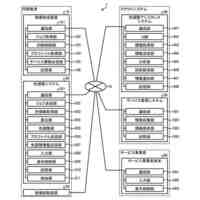
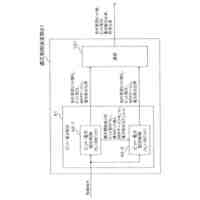
状態検査システムにおける表示処理の一例を示すシーケンス図である。
状態検査システムの表示画面における操作の説明図である。
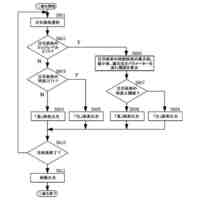
情報処理方法の処理の一例を示すフローチャートである。
図18に示した処理後の表示画面の一例である。
【発明を実施するための形態】
【0009】
<用語の定義等>
以下、図面を参照して、本実施形態の撮像システム及び撮像方法について詳細に説明する。以下の説明におけるX軸方向、Y軸方向、Z軸方向は、図中に示す矢線方向を基準とする。X軸方向、Y軸方向、Z軸方向は、互いに直交する三次元空間を規定する。X軸方向は、移動体(移動装置)の移動方向(進行方向、走行方向)と読み替えてもよい。Y軸方向は、対象物の法面の高さ方向(鉛直方向、垂直方向)と読み替えてもよい。Z軸方向は、移動体(移動装置)の移動方向と交差する方向(移動体(移動装置)から法面に向かう奥行方向、撮像方向)と読み替えてもよい。このように、本実施形態の撮像システム及び撮像方法では、移動体(移動装置)の移動方向をX軸、移動方向と交差する方向をZ軸、X軸とZ軸と直交する方向をY軸、とするXYZ直交座標系が用いられる。
【0010】
本実施形態の撮像システム及び撮像方法は、法面(対象物)を高さ方向の複数の領域に分割して、分割したそれぞれの法面の領域を複数のカメラ(撮像部)で撮像する際に適切な露光量で撮像するために必要な露光時間を確保するものである。すなわち、法面(対象物)を撮像する際に、撮像した画像の輝度が適切となるための適切な露光量で撮像するために必要な露光時間を確保するものである。また、法面の高さ方向のみならず(に加えて)、法面の幅方向に移動しながら連続撮像して、撮像した画像を繋ぎ合わせることで、法面全体を撮像する。つまり、法面の幅方向においても複数の領域に分割して撮像する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
服薬支援装置
13日前
株式会社リコー
撮像システム及び撮像方法
4日前
株式会社リコー
定着装置、及び、画像形成装置
11日前
株式会社リコー
媒体処理装置及び画像形成システム
4日前
株式会社リコー
シート給送装置、及び、画像形成装置
12日前
株式会社リコー
給送装置、画像読取装置及び画像形成装置
12日前
株式会社リコー
画像投影装置、画像投影方法およびプログラム
3日前
株式会社リコー
画像形成装置、画像形成方法、およびプログラム
12日前
株式会社リコー
情報処理システム、情報処理方法およびプログラム
4日前
株式会社リコー
結像レンズ、交換レンズ、撮像装置及び情報処理装置
4日前
株式会社リコー
結像レンズ、交換レンズ、撮像装置及び情報処理装置
4日前
株式会社リコー
指標部材、給送装置、画像読取装置及び画像形成装置
11日前
株式会社リコー
給送装置、押圧ユニット、画像読取装置及び画像形成装置
7日前
株式会社リコー
液体吐出ヘッド、液体吐出ユニット及び液体を吐出する装置
3日前
株式会社リコー
情報処理装置、アプリ生成システム、プログラム、アプリケーション生成方法
11日前
株式会社リコー
情報処理システム、進捗管理方法及びプログラム
3日前
株式会社リコー
診断装置、診断方法、プログラムおよび診断システム
3日前
株式会社リコー
情報処理システム、情報処理方法、情報処理装置及びプログラム
5日前
株式会社リコー
画像処理装置、画像形成システム、画像処理方法およびプログラム
11日前
株式会社リコー
情報処理サーバ、方法、プログラム、情報処理システムおよび情報処理装置
5日前
個人
防犯AIプラグイン
1か月前
個人
音声による制御装置
1か月前
個人
コメント配信システム
1か月前
個人
テレビ会議拡張システム
26日前
個人
電気音響変換装置
1か月前
株式会社SEtech
撮像装置
1か月前
日本放送協会
無線通信装置
1か月前
キヤノン株式会社
撮像装置
1か月前
TOA株式会社
音響システム
27日前
キヤノン電子株式会社
画像処理装置
1か月前
ヤマハ株式会社
音響出力装置
5日前
ヤマハ株式会社
音響出力装置
5日前
キヤノン電子株式会社
画像処理装置
1か月前
キヤノン電子株式会社
画像処理装置
1か月前
個人
無線中継赤外線コピーリモコン
28日前
キヤノン電子株式会社
画像読取装置
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ