TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025072476
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2025016487,2022577994
出願日
2025-02-04,2021-01-29
発明の名称
距離測定装置及び距離測定方法
出願人
株式会社ニコンビジョン
代理人
弁理士法人RYUKA国際特許事務所
主分類
G01S
17/87 20200101AFI20250430BHJP(測定;試験)
要約
【課題】正確に、光を対象物に投射して、対象物までの距離を決定すること。
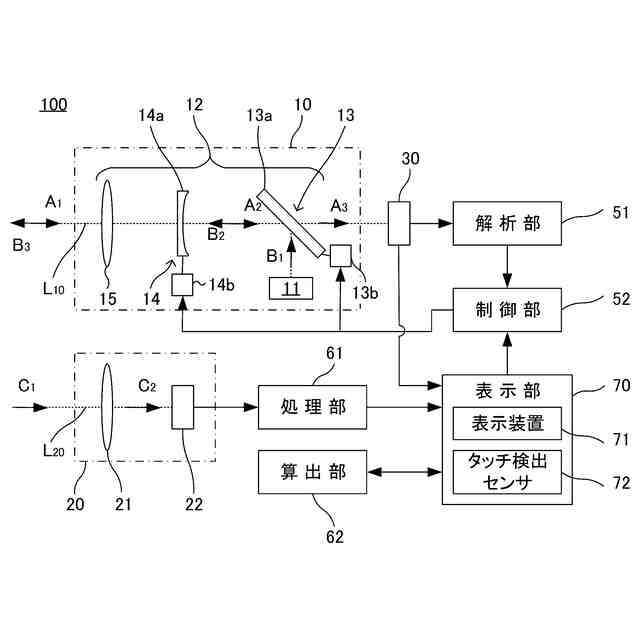
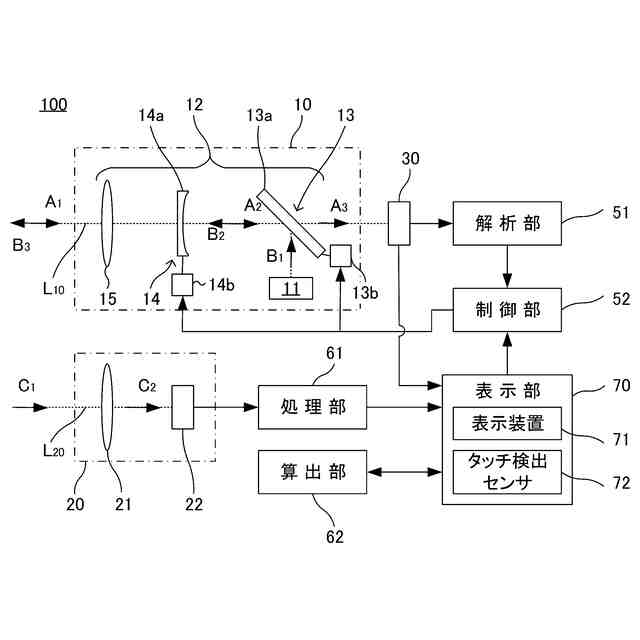
【解決手段】光を投射して対象物までの距離を測定する距離測定装置において、対象物を撮像光学系を介して撮像する撮像部30と、撮像部により得られる撮像結果に基づいて、光の投射に用いる第1光学系の基準軸に対する対象物のずれを検出する解析部51と、対象物のずれの検出結果から定まる方向に光を偏向するように、第1光学系に含まれるレンズ素子を変位させる制御部52と、第1光学系を介して光を対象物に投射する投光部10と、投光部により光を対象物に投射することによって発生する反射光の第2光学系を介した検出結果に基づいて、対象物までの距離を決定する処理部61と、を備え、撮像光学系は、第1光学系又は第2光学系の少なくとも一部と共通する。
【選択図】図1
特許請求の範囲
【請求項1】
光を投射して対象物までの距離を測定する距離測定装置であって、
前記対象物を、撮像光学系を介して撮像する撮像部と、
前記撮像部により得られる撮像結果に基づいて、前記光の投射に用いる第1光学系の基準軸に対する前記対象物のずれを検出する解析部と、
前記対象物のずれの検出結果から定まる方向に前記光を偏向するように、前記第1光学系に含まれるレンズ素子を変位させる制御部と、
前記第1光学系を介して前記光を前記対象物に投射する投光部と、
前記投光部により前記光を前記対象物に投射することによって発生する反射光の第2光学系を介した検出結果に基づいて、前記対象物までの距離を決定する処理部と、
を備え、前記撮像光学系は、前記第1光学系又は前記第2光学系の少なくとも一部と共通する、距離測定装置。
続きを表示(約 800 文字)
【請求項2】
前記撮像光学系は、前記第1光学系の少なくとも一部と共通する、請求項1に記載の距離測定装置。
【請求項3】
前記撮像光学系は、前記第2光学系の少なくとも一部と共通し、
前記制御部は、さらに、前記第2光学系に含まれるレンズ素子を前記第2光学系の基準軸に対して変位させて前記反射光の受光角を傾ける、
請求項1に記載の距離測定装置。
【請求項4】
前記光の偏向角と前記反射光の受光角の変位とは等しく制御される、請求項3に記載の距離測定装置。
【請求項5】
前記第1光学系又は前記第2光学系の一部が前記距離測定装置の機体の手振れ補正の制御に用いられる、請求項1から4のいずれか一項に記載の距離測定装置。
【請求項6】
前記撮像部は、さらに、前記対象物からの反射光を検出する、請求項1から5のいずれか一項に記載の距離測定装置。
【請求項7】
前記対象物からの反射光を検出する検出部をさらに備える、請求項1から5のいずれか一項に記載の距離測定装置。
【請求項8】
前記解析部は、前記撮像結果における前記対象物の画像を解析して前記対象物を特定する、請求項1から7のいずれか一項に記載の距離測定装置。
【請求項9】
前記解析部は、機械学習モデルに基づいて前記対象物の画像を解析し、
前記機械学習モデルは、予め、距離を測定する対象となる対象物の画像を教師データとして機械学習することで構築されている、請求項8に記載の距離測定装置。
【請求項10】
前記解析部は、画像処理法により前記対象物の画像を解析し、
前記画像処理法は、少なくともエッジ検出法を含む、
請求項8に記載の距離測定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、距離測定装置及び距離測定方法に関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
AFエリアセンサの出力に基づいて被写体の輪郭を抽出し、広範囲な測距エリアのうちで輪郭内について重点的に測距を行い、その測距データに基づいてフォーカシングすることで、背景に影響されることなく主要被写体にピントをあわせて撮像するカメラ装置が知られている(例えば、特許文献1参照)。
特許文献1 特開2001-304855号公報
【一般的開示】
【0003】
(項目1)
光を投射して対象物までの距離を測定する距離測定装置であってよい。
距離測定装置は、対象物の検出結果に基づいて、光の投射状態を制御する制御部を備えてよい。
距離測定装置は、制御部により制御された光を対象物に投射する投光部を備えてよい。
距離測定装置は、反射光の検出結果に基づいて、対象物までの距離を決定する処理部を備えてよい。
(項目2)
距離測定装置は、対象物を撮像する撮像部を備えてよい。
制御部は、撮像部により得られた撮像結果に基づいて対象物を検出してよい。
(項目3)
投光部は、光学系を介して光を対象物に投射してよい。
(項目4)
撮像部は、光学系、又は、光学系と異なる撮像光学系を介して対象物を撮像してよい。
(項目5)
投光部は光を射出する光源部を含んでよい。
制御部は、光源部及び光学系のいずれか1つを制御して光の投射状態を制御してよい。
(項目6)
光の投射状態は、光の照射方向及び光の強度のいずれか1つを含んでよい。
(項目7)
撮像部は、更に対象物からの反射光を検出してよい。
(項目8)
距離測定装置は、対象物からの反射光を検出する検出部を備えてよい。
(項目9)
距離測定装置は、撮像部により得られた撮像結果を解析する解析部を備えてよい。
解析部は、撮像結果における対象物の画像を解析して対象物を特定してよい。
(項目10)
解析部は、機械学習モデルに基づいて対象物の画像を解析してよい。
機械学習モデルは、予め、距離を測定する対象となる対象物の画像を教師データとして機械学習することで構築されていてよい。
(項目11)
解析部は、画像処理法により対象物の画像を解析してよい。
画像処理法は、少なくともエッジ検出法を含んでよい。
(項目12)
制御部は、解析部が解析した対象物が撮像部の撮像領域の中央で撮像されるように光学系、光学系と異なる撮像光学系、及び撮像部のいずれか1つを制御してよい。
(項目13)
解析部は、対象物を画像中心にて特定してよい。
(項目14)
撮像部は、対象物を異なるタイミングで複数回、撮像してよい。
解析部は、複数の画像間の画像差から対象物を特定してよい。
(項目15)
解析部は、画像の解像度を検出してよい。
制御部は、解像度の検出結果に基づいて光学系を制御して、対象物の像を拡大又は縮小してよい。
(項目16)
解析部は、対象物の画像を解析して対象物の中心又は重心を特定してよい。
制御部は、投光部及び光学系のいずれか1つを制御して、光を特定された対象物の中心に投射してよい。
(項目17)
解析部は、対象物の画像を解析して対象物を特定してよい。
制御部は、光を制御して、光を用いて特定された対象物をスキャンしてよい。
処理部は、光による対象物のスキャン位置と反射光の検出結果との関係に基づいて対象物までの距離を決定してよい。
(項目18)
距離測定装置は、撮像部により得られた対象物の画像を表示画面上に表示する表示部をさらに備えてよい。
(項目19)
【0004】
(項目26)
光を投射して対象物までの距離を測定する距離測定方法であってよい。
距離測定方法は、対象物の検出結果に基づいて、光の投射状態を制御してよい。
距離測定方法は、制御する段階で制御された光を対象物に投射してよい。
距離測定方法は、反射光の検出結果に基づいて、対象物までの距離を決定してよい。
【0005】
なお、上記の発明の概要は、本発明の特徴の全てを列挙したものではない。また、これらの特徴群のサブコンビネーションもまた、発明となりうる。
【図面の簡単な説明】
【0006】
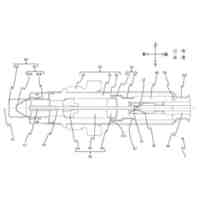
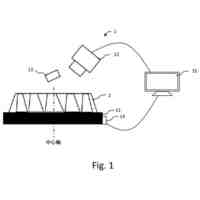
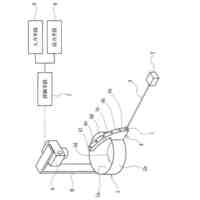
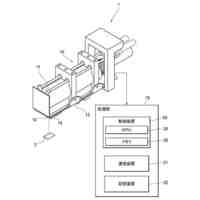
本実施形態に係る距離測定装置の構成を示す。
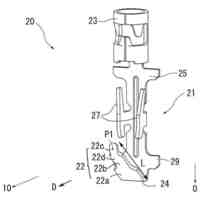
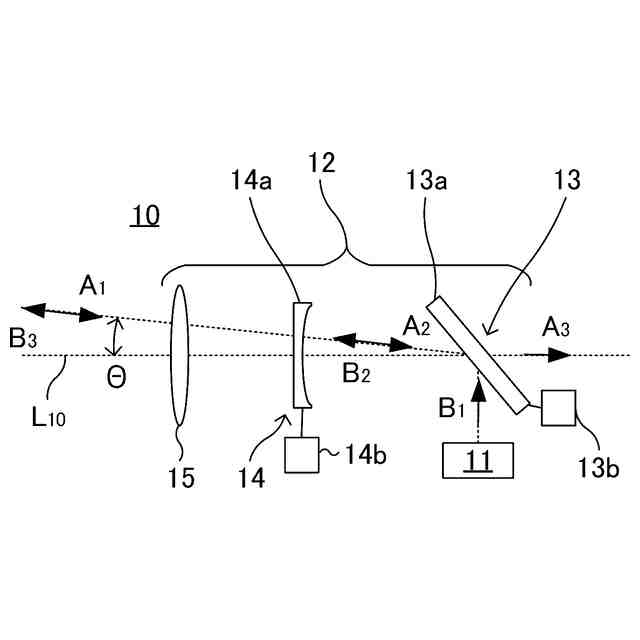
ミラーによる光の偏向を示す。
補正レンズによる光の偏向を示す。
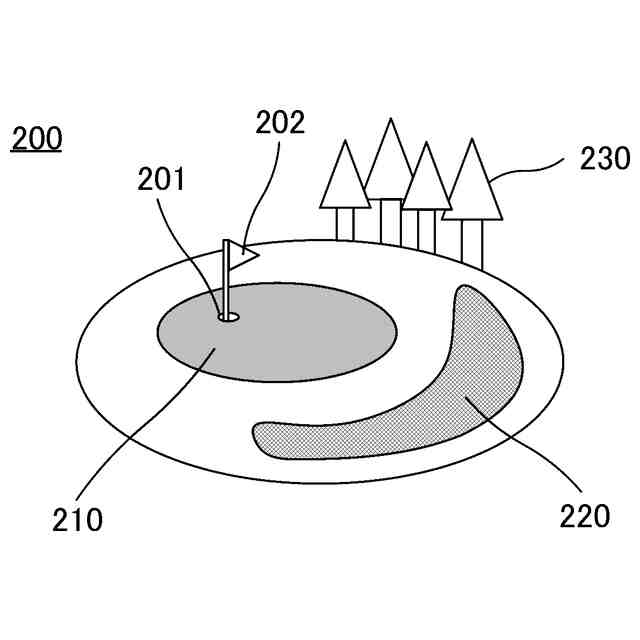
撮像画像から特定可能な対象物の一例を示す。
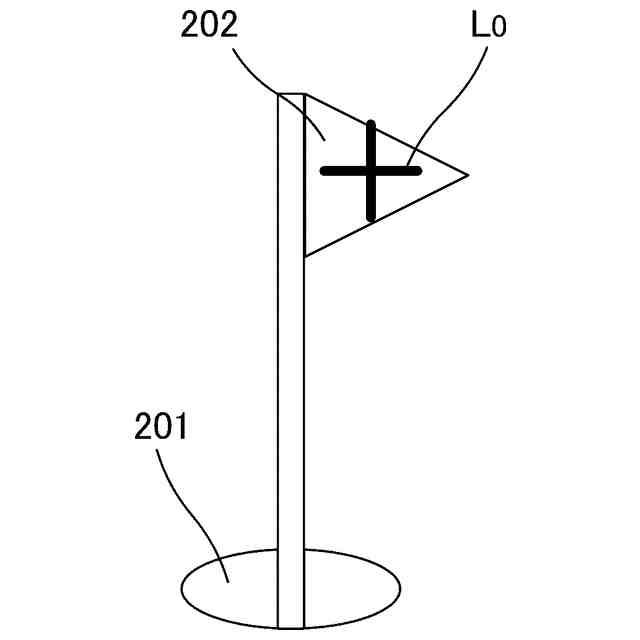
撮像画像から特定される対象物を示す。
特定された対象物について検出される基準軸からのずれを示す。
特定された対象物に対するブレ補正を示す。
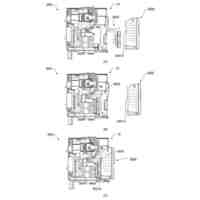
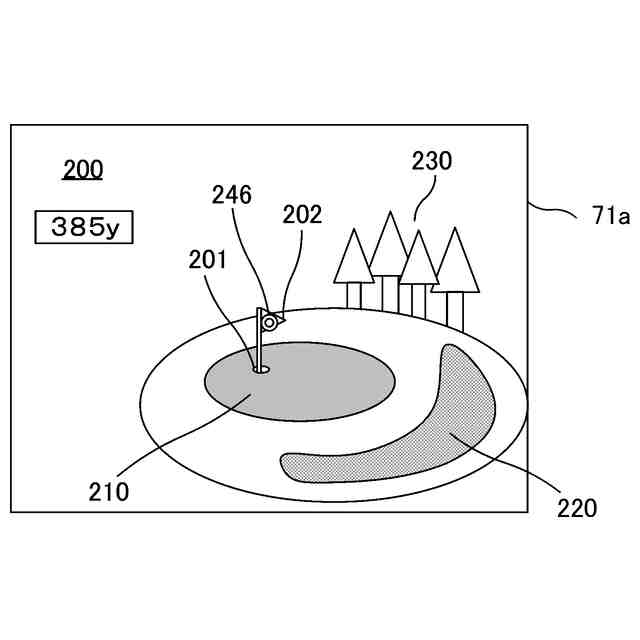
表示画面上の表示の一例を示す。
表示画面上の表示の別の例を示す。
表示画面上でのタッチ操作を検出した場合の表示動作の一例を示す。
表示画面上でのタッチ操作を検出した場合の表示動作の一例を示す。
表示画面上での複数のタッチ操作を検出した場合の表示動作の一例を示す。
表示画面上での複数のタッチ操作を検出した場合の表示動作の別の例を示す。
本実施形態に係る距離測定方法のフローを示す。
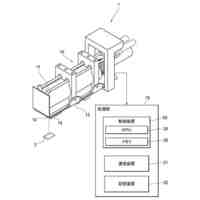
第1の変形例に係る距離測定装置の構成を示す。
第2の変形例に係る距離測定装置の構成を示す。
補正レンズの制御の一例を示す。
【発明を実施するための形態】
【0007】
以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0008】
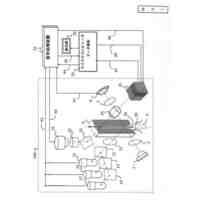
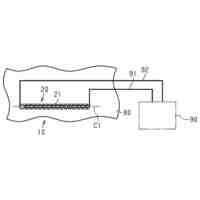
図1は、本実施形態に係る距離測定装置100の構成を示す。距離測定装置100は、光B
3
を投射して対象物までの距離を測定する装置である。なお、距離を測定することを単に測距、距離測定装置100によるその動作を測距動作とも呼ぶ。投光部10が基準軸L
10
に沿って光B
3
を射出する方向(すなわち、図面左方向を前方)、その逆方向(すなわち、図面右方向)を後方とする。ここで、基準軸L
10
の向き(方向とも呼ぶ)は、距離測定装置100の機体(すなわち、構成各部を収容する筐体)の向きより一意に定まる。距離測定装置100は、投光部10、検出部20、撮像部30、解析部51、制御部52、処理部61、表示部70、及び算出部62を備える。なお、解析部51、制御部52、処理部61、及び算出部62は、演算処理装置(不図示)が専用プログラムを実行することで発現する機能部である。
【0009】
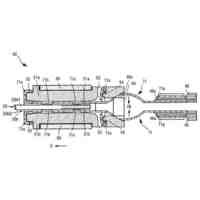
投光部10は、後述する制御部52により制御された光B
3
を、投光観察光学系(光学系の一例)12を介して対象物に投射するユニットである。投光部10は、光源11及び投光観察光学系12を含む。
【0010】
光源11は、一定の周期でパルス状の光B
1
を生成し、投光観察光学系12に入れる。光源11として、たとえば、赤外線を発振する半導体レーザを採用することができる。光B
1
は、一回の測距動作において、予め定められた数、例えば320回、一定の周期、例えば500~700μ秒の周期で射出される。なお、光源11が駆動装置(不図示)を有し、制御部52が駆動装置を制御して光源11を傾動させてもよい。この場合、光源11から射出される光B
1
の射出方向が変わり、対象物に向けて光B
1
を偏向させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
23日前
株式会社イシダ
計量装置
17日前
日本精機株式会社
表示装置
3日前
個人
アクセサリー型テスター
24日前
株式会社エビス
水準器
2日前
日本精機株式会社
アセンブリ
9日前
個人
準結晶の解析方法
9日前
株式会社豊田自動織機
自動走行体
8日前
日本碍子株式会社
ガスセンサ
2日前
栄進化学株式会社
浸透探傷用濃縮液
1か月前
エイブリック株式会社
電流検出回路
1か月前
株式会社テイエルブイ
振動検出装置
23日前
株式会社ミツトヨ
画像測定機
25日前
株式会社チノー
放射光測温装置
1か月前
ダイハツ工業株式会社
試料セル
23日前
トヨタ自動車株式会社
検査装置
17日前
株式会社 キョーワ
食品搬送装置
1か月前
日本特殊陶業株式会社
ガスセンサ
9日前
日本特殊陶業株式会社
ガスセンサ
1か月前
GEE株式会社
光学特性測定装置
8日前
トヨタ自動車株式会社
電気自動車
24日前
大和製衡株式会社
計量装置
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社不二越
X線測定装置
3日前
株式会社TISM
センサ部材
8日前
理研計器株式会社
ガス検出器
25日前
株式会社不二越
X線測定装置
3日前
理研計器株式会社
ガス検出器
25日前
大成建設株式会社
画像表示システム
1か月前
理研計器株式会社
ガス検出器
25日前
理研計器株式会社
ガス検出器
25日前
株式会社熊谷組
計測システム
1か月前
日本碍子株式会社
ガスセンサ
1か月前
理研計器株式会社
ガス検出器
25日前
東ソー株式会社
簡易型液体クロマトグラフ
19日前
株式会社ニコン
検出装置
23日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ