TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025073669
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023184645
出願日
2023-10-27
発明の名称
3次元位置検出装置およびそれを用いた溶接機
出願人
システムエルエスアイ株式会社
代理人
個人
,
個人
,
個人
主分類
B23K
9/127 20060101AFI20250502BHJP(工作機械;他に分類されない金属加工)
要約
【課題】より簡易に位置を検出する3次元位置検出装置および溶接機を提供する。
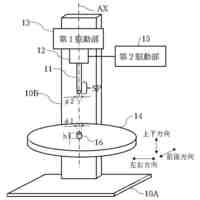
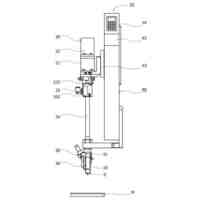
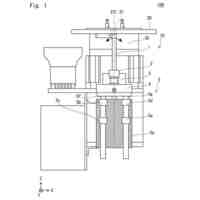
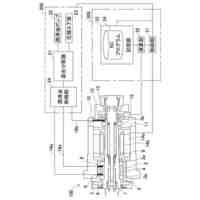
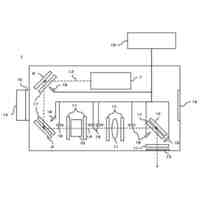
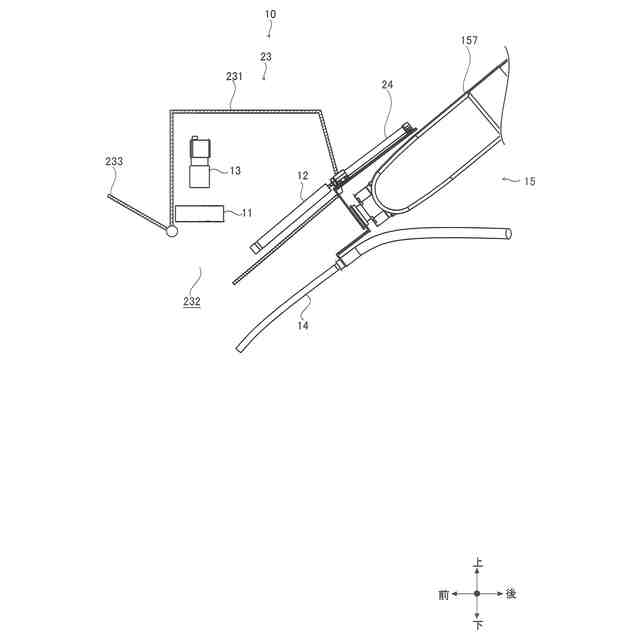
【解決手段】溶接機10の第1照射部11は、マークを可視化することを可能とする第1光線17を、マークが付与された部分のワーク31に対して照射する。第2照射部12は、第2光線18をワーク31に対して照射する。撮影部13は、マークが付与された部分のワーク31を撮影することで第1画像19を生成し、第2光線18が照射されている状態のワーク31を撮影することで第2画像20を生成する。溶接部14は、ワーク31を溶接する。駆動部15は、溶接部14の3次元位置および姿勢を変化させる。演算制御部16は、溶接位置情報21に基づき、溶接部14を用いて、マークが付与された部分のワーク31を溶接する。
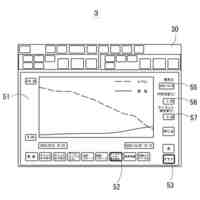
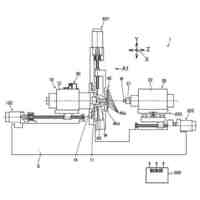
【選択図】図3
特許請求の範囲
【請求項1】
マークが付与された物体に対して位置検出を行う3次元位置検出装置であり、
第1照射部と、第2照射部と、撮影部と、演算制御部と、を具備し、
前記第1照射部は、前記マークを可視化することを可能とする第1光線を、前記マークが付与された部分の前記物体に対して照射し、
前記第2照射部は、前記第1照射部とは波長が異なる第2光線を、前記物体に対して照射し、
前記撮影部は、前記マークが付与された部分の前記物体を撮影することで第1画像を生成し、前記第2光線が照射されている状態の前記物体を撮影することで第2画像を生成し、
前記演算制御部は、
前記第1画像から、前記マークの位置を検出し、
前記第2画像から、前記マークの3次元位置を算出し、
前記マークの3次元位置に基づき、位置情報を算出することを特徴とする3次元位置検出装置。
続きを表示(約 690 文字)
【請求項2】
マークが付与されたワークに対して溶接作業を行う溶接機であり、
第1照射部と、第2照射部と、撮影部と、溶接部と、駆動部と、演算制御部と、を具備し、
前記第1照射部は、前記マークを可視化することを可能とする第1光線を、前記マークが付与された部分の前記ワークに対して照射し、
前記第2照射部は、前記第1照射部とは波長が異なる第2光線を、前記ワークに対して照射し、
前記撮影部は、前記マークが付与された部分の前記ワークを撮影することで第1画像を生成し、前記第2光線が照射されている状態の前記ワークを撮影することで第2画像を生成し、
前記溶接部は、前記ワークを溶接できるように構成され、
前記駆動部は、前記溶接部の3次元位置および姿勢を変化できるように構成され、
前記演算制御部は、
前記第1画像から、前記マークの位置を検出し、
前記第2画像から、前記マークの3次元位置を算出し、
前記マークの3次元位置に基づき、溶接位置情報を算出し、
前記溶接位置情報に基づき、前記溶接部を用いて、前記マークが付与された部分の前記ワークを溶接することを特徴とする溶接機。
【請求項3】
前記第1光線は、UV光線であり、
前記マークは、前記第1光線を照射することで可視光線により視認することができることを特徴とする請求項2に記載の溶接機。
【請求項4】
前記溶接位置情報は、溶接開始位置、溶接ルートおよび溶接終了位置を含むことを特徴とする請求項2に記載の溶接機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、3次元位置検出装置およびそれを用いた溶接機に関し、特に、溶接箇所の特定を容易に行うことができる溶接機に関する。
続きを表示(約 980 文字)
【背景技術】
【0002】
3次元位置検出装置を適用する分野の1つとして溶接がある。ここで、溶接とは、部材の接合部に熱を加えることで、部材同士を一体化する方法である。
【0003】
近年、車両等の製造工程において、ロボットを用いて溶接を行う方法も開発されている。特許文献1に記載された発明では、多関節ロボットの先端に溶接トーチを配設し、所定箇所に配設された溶接対象物、例えば車体に対して溶接作業を実行していた。
【先行技術文献】
【特許文献】
【0004】
特開2021-094581号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前述した画像処理技術を用いた3次元位置検出装置および溶接機では、より簡易に溶接を行う観点から改善の余地があった。
【0006】
一例として、自動車工場等の工場の内部で溶接を行う場合には、ワークおよび溶接機の位置は予め決められているため、両者の相対位置を特定することは容易である。
【0007】
一方、溶接は様々な状況で行われる。例えば、土木現場や建築現場等において、鉄筋の溶接に際して溶接機を導入した場合、溶接機に対する鉄筋の相対位置を特定する必要がある。しかしながら、たかだか一回のための溶接のために、溶接機に対する鉄筋を測定して特定するとなると、その測定作業が非常に煩雑である課題があった。また、建設現場で作業する作業員が、係る測定作業に不慣れであると、溶接機の導入事態が難しくなる課題があった。
【0008】
更に、少子高齢化に伴い、土木現場や建築現場等において熟練溶接工を確保することが困難になっており、係る事項を解決するための溶接ロボットが切望されている。
【0009】
また、3次元位置の検出に伴う課題は、溶接のみならず、外観品質検査等の他の分野においても発生し得る。
【0010】
本発明は、このような問題点を鑑みてなされたものであり、本発明の目的は、より簡易に位置を検出する3次元位置検出装置および溶接機を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
タップ
10日前
個人
加工機
4日前
個人
スラッジ除去装置
3か月前
株式会社不二越
ドリル
3日前
日東精工株式会社
ねじ締め機
1か月前
株式会社不二越
ドリル
1か月前
日東精工株式会社
ねじ締め装置
2か月前
個人
複合金属回転式ホーン
3か月前
株式会社FUJI
工作機械
2か月前
有限会社 ナプラ
金属粒子
2か月前
日東精工株式会社
多軸ねじ締め機
1か月前
株式会社FUJI
工作機械
1か月前
エフ・ピー・ツール株式会社
リーマ
20日前
株式会社アンド
半田付け方法
3日前
株式会社ダイヘン
多層盛り溶接方法
18日前
株式会社ダイヘン
積層造形溶接方法
2か月前
株式会社アンド
半田付け方法
3日前
日進工具株式会社
エンドミル
20日前
ブラザー工業株式会社
工作機械
1か月前
ブラザー工業株式会社
工作機械
1か月前
トヨタ自動車株式会社
接合方法
1か月前
株式会社FUJI
チャック装置
1か月前
トヨタ自動車株式会社
取付装置
3か月前
株式会社ナベヤ
締結装置
2か月前
株式会社ツガミ
工作機械
3か月前
株式会社不二越
超硬合金製ドリル
16日前
株式会社不二越
歯車研削盤
3か月前
大和ハウス工業株式会社
溶接方法
2か月前
株式会社ダイヘン
溶接装置
1か月前
株式会社コスメック
クランプ装置
1か月前
オークマ株式会社
工作機械
2か月前
株式会社コスメック
クランプ装置
1か月前
津田駒工業株式会社
2連回転割出し装置
2か月前
株式会社プロテリアル
金属箔の溶接方法
1か月前
オークマ株式会社
診断装置
2か月前
ビアメカニクス株式会社
レーザ加工装置
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ