TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074061
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2024188316
出願日
2024-10-25
発明の名称
キャリアの倉庫への戻し
出願人
杭州海康机器人股ふん有限公司
,
Hangzhou Hikrobot Co., Ltd.
代理人
個人
,
個人
,
個人
主分類
B65G
1/137 20060101AFI20250502BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】本発明は、キャリアを倉庫に戻す方法、装置、及びデバイスを提供する。
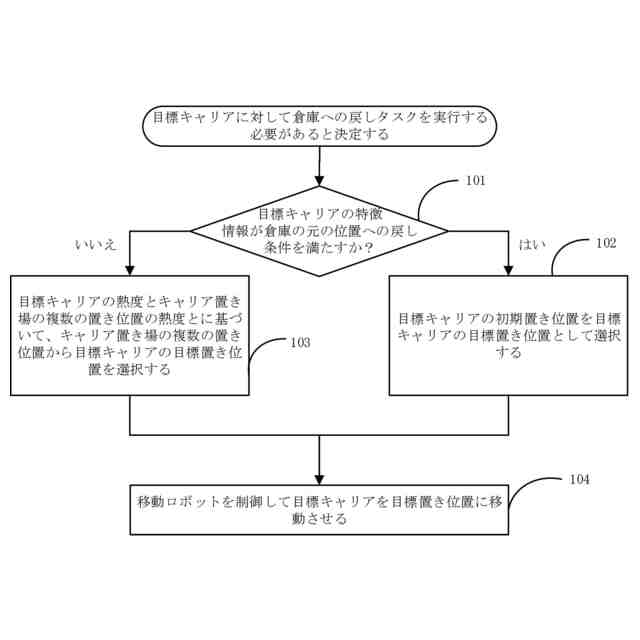
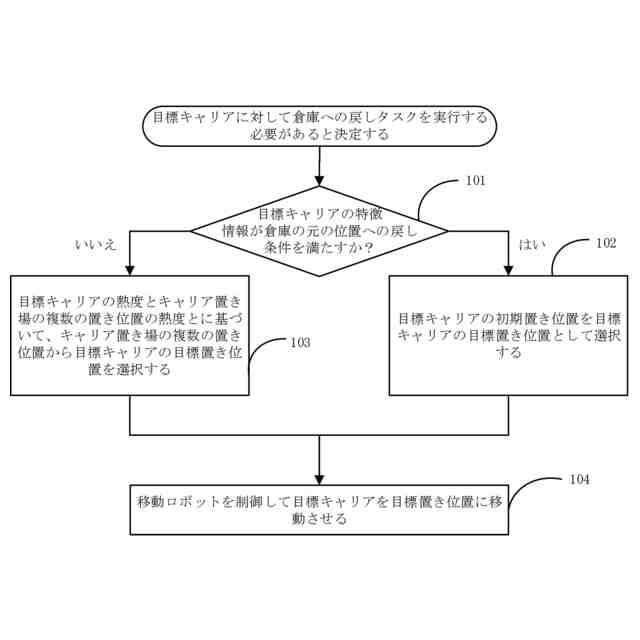
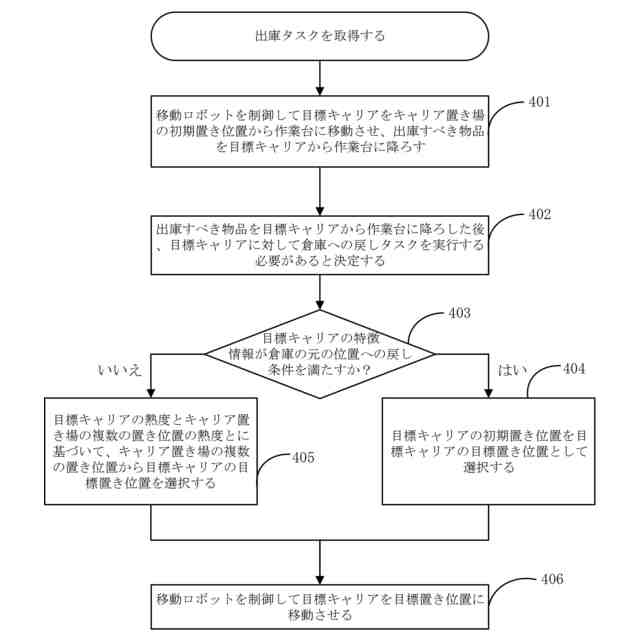
【解決手段】本発明の一例によれば、該方法は、目標キャリアに対して倉庫への戻しタスクを実行する必要があると決定した場合、目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するステップと、満たす場合、前記目標キャリアのキャリア置き場における初期置き位置を前記目標キャリアの目標置き位置として選択するステップと、満たさない場合、前記目標キャリアの熱度と前記キャリア置き場の複数の置き位置の熱度とに基づいて、前記複数の置き位置から前記目標キャリアの目標置き位置を選択するステップと、を含む。このように、置き位置を合理的に使用することで、倉庫管理の出庫効率及び入庫効率を向上させることができる。
【選択図】図1
特許請求の範囲
【請求項1】
目標キャリアに対して倉庫への戻しタスクを実行する必要があると決定した場合、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するステップであって、前記特徴情報は、前記目標キャリアの作業タイプ、前記目標キャリアの搬送ツールタイプ、前記目標キャリアの物品タイプのうちの少なくとも1つを含む、ステップと、
満たす場合、前記目標キャリアの初期置き位置を前記目標キャリアの目標置き位置として選択するステップであって、前記初期置き位置は、前記目標キャリアが入庫タスク又は出庫タスクを実行する前のキャリア置き場における置き位置である、ステップと、
満たさない場合、前記目標キャリアの熱度と前記キャリア置き場の複数の置き位置の熱度とに基づいて、前記複数の置き位置から前記目標キャリアの目標置き位置を選択するステップと、
移動ロボットを制御して前記目標キャリアを前記目標置き位置に移動させるステップと、を含む、
ことを特徴とするキャリアを倉庫に戻す方法。
続きを表示(約 3,500 文字)
【請求項2】
前記特徴情報が作業タイプを含む場合、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するステップは、
前記目標キャリアの作業タイプが倉庫切り替えタイプを含み、前記倉庫切り替えタイプが、前記目標キャリアが位置する倉庫が切り替え中であることを示す場合、前記作業タイプが倉庫の元の位置への戻し条件を満たすと決定するステップ、
前記目標キャリアの作業タイプが倉庫サービスタイプを含み、前記倉庫サービスタイプが、前記目標キャリアがサンプリング品質検査サービスを実行していることを示す場合、前記作業タイプが倉庫の元の位置への戻し条件を満たすと決定するステップ、又は、
前記目標キャリアの作業タイプが倉庫制限タイプを含み、前記倉庫制限タイプが、前記目標キャリアが位置する倉庫が物品の最大高さを制限することを示す場合、前記作業タイプが倉庫の元の位置への戻し条件を満たすと決定するステップ、のうちのいずれか1つを含む、
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記特徴情報が搬送ツールタイプを含む場合、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するステップは、
前記目標キャリアの搬送ツールタイプが、前記目標キャリアの搬送ツールが目標タイプの移動ロボットであることを示す場合、前記搬送ツールタイプが倉庫の元の位置への戻し条件を満たすと決定するステップを含み、前記目標タイプの移動ロボットで目標キャリアを搬送する場合、前記目標キャリアが位置する倉庫は、物品の最大高さを制限する、
ことを特徴とする請求項1に記載の方法。
【請求項4】
前記特徴情報が物品タイプを含む場合、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するステップは、
前記物品タイプが、前記目標キャリアに指定タイプの物品が載せられることを示す場合、前記物品タイプが倉庫の元の位置への戻し条件を満たすと決定するステップを含み、前記指定タイプの物品は、置き場所の環境に対する要求を有し、前記目標キャリアの初期置き位置は、前記指定タイプの物品の環境要求を満たす、
ことを特徴とする請求項1に記載の方法。
【請求項5】
目標キャリアに対して倉庫への戻しタスクを実行する必要があると決定することは、
入庫タスクを取得した場合、移動ロボットを制御して前記目標キャリアをキャリア置き場の初期置き位置から作業台に移動させ、入庫すべき物品を前記作業台から前記目標キャリアに載せた後、前記目標キャリアに対して倉庫への戻しタスクを実行する必要があると決定すること、又は、
出庫タスクを取得した場合、移動ロボットを制御して出庫すべき物品を載せた前記目標キャリアをキャリア置き場の初期置き位置から作業台に移動させ、前記出庫すべき物品を目標キャリアから前記作業台に降ろした後、前記目標キャリアに対して倉庫への戻しタスクを実行する必要があると決定することを含む、
ことを特徴とする請求項1~4のいずれか1項に記載の方法。
【請求項6】
移動ロボットがキャリア置き場の初期置き位置から離れるように制御した後、さらに、
前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するステップと、
満たす場合、前記目標キャリア以外のキャリアが前記初期置き位置に移動することを禁止するステップと、
満たさない場合、前記目標キャリア以外のキャリアが前記初期置き位置に移動することを許可するステップと、を含む、
ことを特徴とする請求項5に記載の方法。
【請求項7】
前記目標キャリアの熱度と前記キャリア置き場の複数の置き位置の熱度とに基づいて、前記複数の置き位置から前記目標キャリアの目標置き位置を選択するステップは、
複数の倉庫へ戻すべきキャリアのうちの各倉庫へ戻すべきキャリアについて、前記倉庫へ戻すべきキャリアが物品を運ぶ目標回数を決定し、前記目標回数に基づいて前記倉庫へ戻すべきキャリアの熱度を決定するステップであって、前記目標回数は、第1回数と第2回数との和であり、第1回数は、物品が作業台から前記倉庫へ戻すべきキャリアに移動する回数であり、第2回数は、物品が前記倉庫へ戻すべきキャリアから作業台に移動する回数であり、前記目標回数が大きいほど、前記倉庫へ戻すべきキャリアの熱度が大きくなる、ステップと、
前記キャリア置き場の複数の空き置き位置のうちの各空き置き位置の熱度を決定するステップであって、前記空き置き位置と作業台との間の距離が小さいほど、該空き置き位置の熱度が大きくなる、ステップと、
各前記倉庫へ戻すべきキャリアの熱度に基づいて、全ての前記複数の倉庫へ戻すべきキャリアをソートし、前記目標キャリアの第1ソート位置を決定するステップと、
各前記空き置き位置の熱度に基づいて、全ての前記複数の空き置き位置をソートし、前記第1ソート位置にマッチングする第2ソート位置を決定し、前記第2ソート位置に基づいて、1つの空き置き位置を前記目標キャリアの目標置き位置として選択するステップと、を含む、
ことを特徴とする請求項1~4のいずれか1項に記載の方法。
【請求項8】
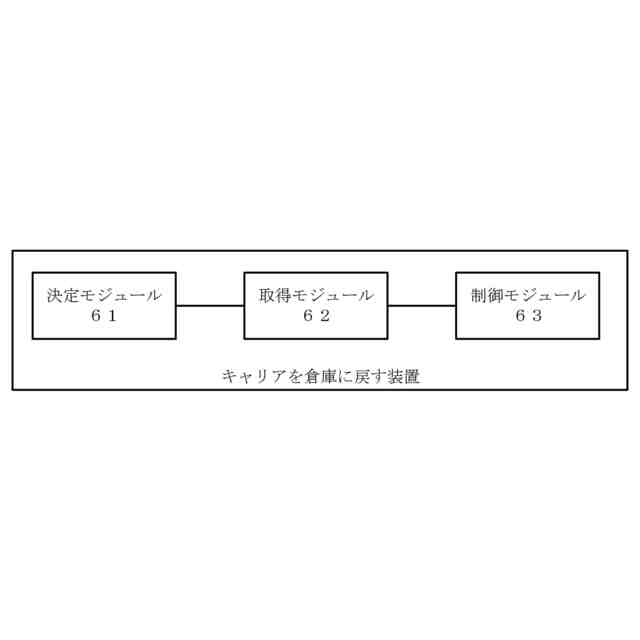
目標キャリアに対して倉庫への戻しタスクを実行する必要があると決定した場合、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するための決定モジュールであって、前記特徴情報は、前記目標キャリアの作業タイプ、前記目標キャリアの搬送ツールタイプ、前記目標キャリアの物品タイプのうちの少なくとも1つを含む、決定モジュールと、
前記特徴情報が倉庫の元の位置への戻し条件を満たす場合、前記目標キャリアの初期置き位置を前記目標キャリアの目標置き位置として選択し、前記特徴情報が倉庫の元の位置への戻し条件を満たさない場合、前記目標キャリアの熱度とキャリア置き場の複数の置き位置の熱度とに基づいて、前記複数の置き位置から前記目標キャリアの目標置き位置を選択するための取得モジュールであって、前記初期置き位置は、前記目標キャリアが入庫タスク又は出庫タスクを実行する前の前記キャリア置き場における置き位置である、取得モジュールと、
移動ロボットを制御して前記目標キャリアを前記目標置き位置に移動させるための制御モジュールと、を含む、
ことを特徴とするキャリアを倉庫に戻す装置。
【請求項9】
前記特徴情報が作業タイプを含む場合、前記決定モジュールが、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するとき、具体的に、
前記目標キャリアの作業タイプが倉庫切り替えタイプを含み、前記倉庫切り替えタイプが、前記目標キャリアが位置する倉庫が切り替え中であることを示す場合、前記作業タイプが倉庫の元の位置への戻し条件を満たすと決定し、
前記目標キャリアの作業タイプが倉庫サービスタイプを含み、前記倉庫サービスタイプが、前記目標キャリアがサンプリング品質検査サービスを実行していることを示す場合、前記作業タイプが倉庫の元の位置への戻し条件を満たすと決定し、
前記目標キャリアの作業タイプが倉庫制限タイプを含み、前記倉庫制限タイプが、前記目標キャリアが位置する倉庫が物品の最大高さを制限することを示す場合、前記作業タイプが倉庫の元の位置への戻し条件を満たすと決定するために用いられる、
ことを特徴とする請求項8に記載の装置。
【請求項10】
前記特徴情報が搬送ツールタイプを含む場合、前記決定モジュールが、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するとき、具体的に、
前記目標キャリアの搬送ツールタイプが、前記目標キャリアの搬送ツールが目標タイプの移動ロボットであることを示す場合、前記搬送ツールタイプが倉庫の元の位置への戻し条件を満たすと決定するために用いられ、前記目標タイプの移動ロボットで前記目標キャリアを搬送する場合、前記目標キャリアが位置する倉庫は、物品の最大高さを制限する、
ことを特徴とする請求項8に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、倉庫物流技術の分野に関し、特に、キャリアを倉庫に戻すための方法、装置、及びデバイスに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
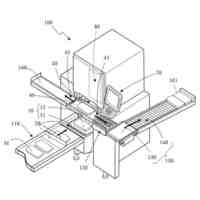
倉庫管理とは、倉庫、及び倉庫に保管されている物品(例えば、商品)を管理することである。倉庫は、物品を保管する建物・場所として、物品を保管・保護する機能を有する。倉庫管理を実現するために、移動ロボット(例えば、フォークリフト、無人搬送車、ビンロボット)によって自動的にキャリア(例えば、ビン、棚、パレット)を搬送し、キャリアは物品を載せるために用いられ、物品を作業台からキャリア置き場(例えば、倉庫のキャリア置き場)に移動させて物品の入庫を実現するか、又は物品をキャリア置き場から作業台に移動させて物品の出庫を実現する。
【0003】
物品の入庫プロセスでは、物品を作業台からキャリアに載せて、キャリアを作業台からキャリア置き場に移動させる必要がある。物品の出庫プロセスにおいて、物品をキャリアによってキャリア置き場から作業台に移動させた後、物品をキャリアから作業台に降ろし、キャリアを作業台からキャリア置き場に戻す必要がある。
【0004】
要するに、物品の入庫プロセスにおいても、物品の出庫プロセスにおいても、キャリアをキャリア置き場に移動させる必要がある。関連技術において、キャリアをキャリア置き場に移動させる際に、通常、キャリアをキャリア置き場の任意の位置に移動させるため、倉庫管理の効率が低く、置き場の位置を合理的に使用することができない。
【発明の概要】
【課題を解決するための手段】
【0005】
本発明は、目標キャリアに対して倉庫への戻しタスクを実行する必要があると決定した場合、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するステップであって、前記特徴情報は、前記目標キャリアの作業タイプ、前記目標キャリアの搬送ツールタイプ、前記目標キャリアの物品タイプのうちの少なくとも1つを含む、ステップと、満たす場合、前記目標キャリアの初期置き位置を前記目標キャリアの目標置き位置として選択するステップであって、前記初期置き位置は、前記目標キャリアが入庫タスク又は出庫タスクを実行する前のキャリア置き場における置き位置である、ステップと、満たさない場合、前記目標キャリアの熱度と前記キャリア置き場の複数の置き位置の熱度とに基づいて、前記複数の置き位置から前記目標キャリアの目標置き位置を選択するステップと、移動ロボットを制御して前記目標キャリアを前記目標置き位置に移動させるステップと、を含む、キャリアを倉庫に戻す方法を提供する。
【0006】
本発明は、目標キャリアに対して倉庫への戻しタスクを実行する必要があると決定した場合、前記目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たすか否かを決定するための決定モジュールであって、前記特徴情報は、前記目標キャリアの作業タイプ、前記目標キャリアの搬送ツールタイプ、前記目標キャリアの物品タイプのうちの少なくとも1つを含む、決定モジュールと、前記特徴情報が倉庫の元の位置への戻し条件を満たす場合、前記目標キャリアの初期置き位置を前記目標キャリアの目標置き位置として選択し、前記特徴情報が倉庫の元の位置への戻し条件を満たさない場合、前記目標キャリアの熱度とキャリア置き場の複数の置き位置の熱度とに基づいて、前記複数の置き位置から前記目標キャリアの目標置き位置を選択するための取得モジュールであって、前記初期置き位置は、前記目標キャリアが入庫タスク又は出庫タスクを実行する前の前記キャリア置き場における置き位置である、取得モジュールと、移動ロボットを制御して前記目標キャリアを前記目標置き位置に移動させるための制御モジュールと、を含む、キャリアを倉庫に戻す装置を提供する。
【0007】
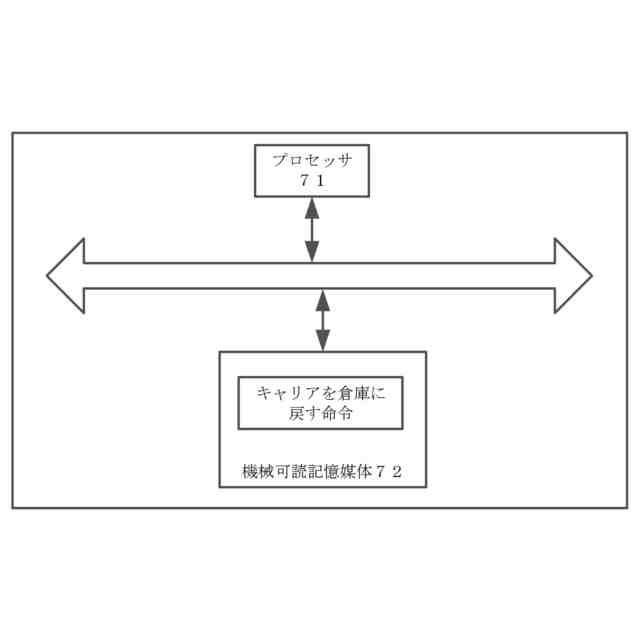
本発明は、プロセッサと機械可読記憶媒体とを含む電子デバイスを提供する。前記機械可読記憶媒体には、前記プロセッサによって実行可能な機械実行可能命令が記憶され、前記プロセッサは、機械実行可能命令を実行して、本発明の上記例のキャリアを倉庫に戻す方法を実施するために用いられる。
【0008】
以上の技術案から分かるように、本発明の実施例では、目標キャリアに対して倉庫への戻しタスクを実行する必要があるとき、目標キャリアの特徴情報が倉庫の元の位置への戻し条件を満たす場合、該目標キャリアの初期置き位置を該目標キャリアの目標置き位置とし、ここで、該初期置き位置は、目標キャリアが入庫タスク又は出庫タスクを実行する前のキャリア置き場における置き位置であり、満たさない場合、目標キャリアの熱度とキャリア置き場における複数の置き位置の熱度とに基づいて目標置き位置を選択する。このように、目標キャリアをキャリア置き場に戻す際に、キャリア置き場の目標置き位置を合理的に選択することができ、倉庫管理の効率を向上させ、置き位置を合理的に使用することは、作業効率を向上させ、出庫効率及び入庫効率を向上させることができる。
【0009】
本発明の実施例又は従来技術における技術案をより明確に説明するために、以下、本発明の実施例又は従来技術の説明に使用する必要がある図面を簡単に紹介するが、明らかに、以下の説明における図面は、本発明に記載されたいくつかの実施例に過ぎず、当業者にとって、本発明の実施例のこれらの図面に基づいて他の図面を取得することができる。
【図面の簡単な説明】
【0010】
本発明の一実施形態によるキャリアを倉庫に戻す方法の概略フロー図である。
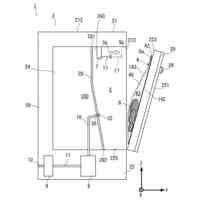
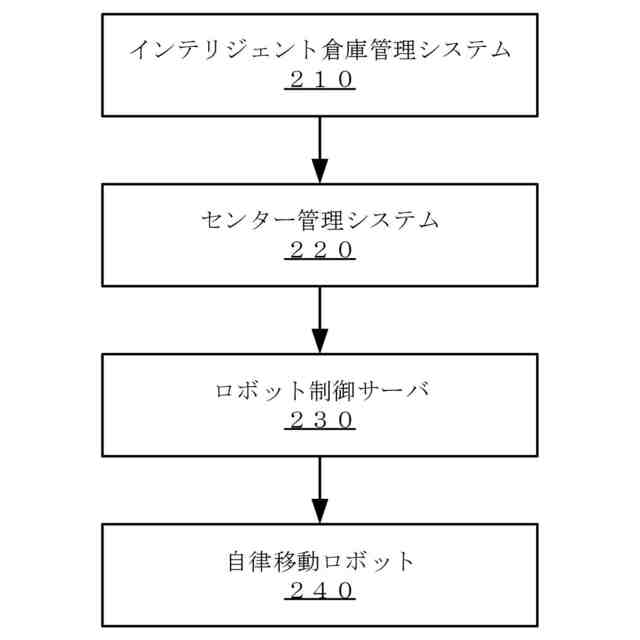
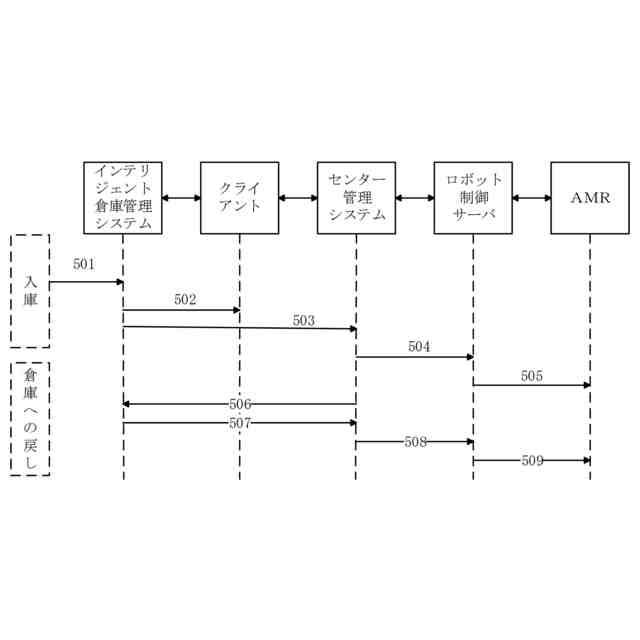
本発明の一実施形態によるシステムの概略構造図である。
本発明の一実施形態によるキャリアを倉庫に戻す方法の概略フロー図である。
本発明の一実施形態によるキャリアを倉庫に戻す方法の概略フロー図である。
本発明の一実施形態によるキャリアを倉庫に戻す方法の概略フロー図である。
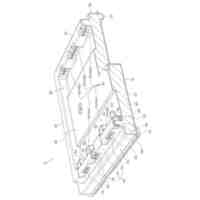
本発明の一実施形態によるキャリアを倉庫に戻す装置の概略構造図である。
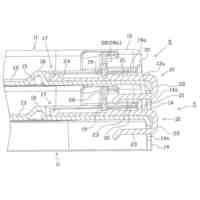
本発明の一実施形態による電子デバイスのハードウェア構造図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
7か月前
個人
包装体
7か月前
個人
ゴミ箱
7か月前
個人
段ボール箱
1か月前
個人
ゴミ収集器
1か月前
個人
段ボール箱
1か月前
個人
容器
3か月前
個人
パウチ補助具
6か月前
個人
角筒状構造体
3日前
個人
宅配システム
1か月前
個人
折り畳み水槽
7か月前
個人
土嚢運搬器具
3か月前
個人
コード類収納具
2か月前
個人
ダンボール宝箱
7か月前
個人
お薬の締結装置
14日前
個人
閉塞装置
4か月前
株式会社コロナ
梱包材
3日前
個人
圧縮収納袋
7か月前
株式会社和気
包装用箱
3か月前
個人
ゴミ処理機
3か月前
個人
貯蔵サイロ
1か月前
三甲株式会社
容器
14日前
個人
袋入り即席麺
1か月前
三甲株式会社
容器
9か月前
三甲株式会社
蓋体
2か月前
個人
粘着テープ切断装置
9か月前
個人
包装箱
4か月前
個人
輸送積荷用動吸振器
23日前
個人
粘着テープ剥がし具
8か月前
三甲株式会社
容器
14日前
積水樹脂株式会社
接着剤
6か月前
三甲株式会社
蓋体
4か月前
株式会社イシダ
箱詰装置
9か月前
株式会社イシダ
包装装置
7か月前
個人
搬送システム
1か月前
株式会社イシダ
搬送装置
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ