TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085179
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023198870
出願日
2023-11-24
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250529BHJP(信号)
要約
【課題】自車両の斜め後方に立体物が存在する場合に警報を発する運転支援装置であって、不要な警報を抑制可能な運転支援装置を提供する。
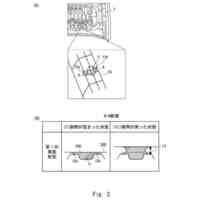
【解決手段】運転支援装置は、自車両の周囲に存在する物標に関する情報を取得する車載センサと、自車両の斜め後方の警報対象領域内に立体物が存在する場合に警報を発するように報知装置を制御するプロセッサを備える。前記プロセッサは、自車両が第一レーンの中央部を走行している場合に、第一長辺と自車両との横方向距離を第一所定値に設定するとともに、第二長辺と自車両との横方向距離を第二所定値に設定し、自車両が前記第一レーンの幅方向における中央部から、当該第一レーンに隣接する第二レーン側へ変位した場合に、前記第一長辺と自車両との横方向距離を前記第一所定値に設定するとともに、前記第二長辺と自車両との横方向距離を前記第二所定値よりも小さい値に設定する。
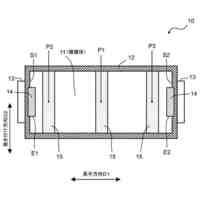
【選択図】図3
特許請求の範囲
【請求項1】
自車両の周囲に存在する物標に関する情報を取得する車載センサと、
自車両の斜め後方にて前後方向に延びる帯状の警報対象領域内に立体物が存在する場合に警報が発せられるように報知装置を制御するプロセッサと、
を備えた運転支援装置であって、
前記プロセッサは、
自車両が第一レーンの幅方向における中央部を走行している場合に、前記警報対象領域の長辺であって自車両側に位置する第一長辺と自車両との横方向距離を第一所定値に設定するとともに、前記警報対象領域の長辺であって自車両とは反対側に位置する第二長辺と自車両との横方向距離を第二所定値に設定し、
自車両が前記第一レーンの幅方向における中央部から、当該第一レーンに隣接する第二レーン側へ変位した場合に、前記第一長辺と自車両との横方向距離を前記第一所定値に設定するとともに、前記第二長辺と自車両との横方向距離を前記第二所定値よりも小さい値に設定する、
ように構成された、運転支援装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の運転支援装置において、
前記プロセッサは、自車両が前記第一レーンの幅方向における中央部から前記第二レーン側へ変位した場合の当該横方向変位量を取得し、前記第二長辺と自車両との横方向距離を前記第二所定値から前記横方向変位量を減算した値に設定する、ように構成された、運転支援装置。
【請求項3】
請求項1又は請求項2に記載の運転支援装置において、
前記プロセッサは、前記第一レーンの幅に基づいて、前記第二所定値を設定する、ように構成された、運転支援装置。
【請求項4】
自車両の周囲に存在する物標に関する情報を取得する情報取得ステップと、
自車両の斜め後方にて前後方向に延びる帯状の警報対象領域内に立体物が存在する場合に警報が発せられるように報知装置を制御する報知ステップと、
を含む運転支援方法であって、
前記報知ステップは、
自車両が第一レーンの幅方向における中央部を走行している場合に、前記警報対象領域の長辺であって自車両側に位置する第一長辺と自車両との横方向距離を第一所定値に設定するとともに、前記警報対象領域の長辺であって自車両とは反対側に位置する第二長辺と自車両との横方向距離を第二所定値に設定するステップと、
自車両が前記第一レーンの幅方向における中央部から、当該第一レーンに隣接する第二レーン側へ変位した場合に、前記第一長辺と自車両との横方向距離を前記第一所定値に設定するとともに、前記第二長辺と自車両との横方向距離を前記第二所定値よりも小さい値に設定するステップと、
を含む、ように構成された、運転支援方法。
【請求項5】
自車両が備えるコンピューターに、
自車両の周囲に存在する物標に関する情報を取得する情報取得ステップと、
自車両の斜め後方にて前後方向に延びる帯状の警報対象領域内に立体物が存在する場合に警報が発せられるように報知装置を制御する報知ステップと、
を実行させる運転支援プログラムであって、
前記報知ステップは、
自車両が第一レーンの幅方向における中央部を走行している場合に、前記警報対象領域の長辺であって自車両側に位置する第一長辺と自車両との横方向距離を第一所定値に設定するとともに、前記警報対象領域の長辺であって自車両とは反対側に位置する第二長辺と自車両との横方向距離を第二所定値に設定するステップと、
自車両が前記第一レーンの幅方向における中央部から、当該第一レーンに隣接する第二レーン側へ変位した場合に、前記第一長辺と自車両との横方向距離を前記第一所定値に設定するとともに、前記第二長辺と自車両との横方向距離を前記第二所定値よりも小さい値に設定するステップと、
を含む、ように構成された、運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両の斜め後方の所定の領域内に立体物が存在する場合に自車両の運転者に対して警報を発する運転支援装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
自車両の斜め後方の所定の領域内に立体物が存在する場合に自車両の運転者に対して警報を発する運転支援装置が提案されている(例えば、下記特許文献1を参照。)。この運転支援装置(以下、「従来装置」と称呼する。)は、自車両の後方(右斜め後方及び左斜め後方)へ電波を放射する。自車両の斜め後方に立体物が存在している場合、従来装置から放射された電波が当該立体物にて反射し、当該電波(反射波)が自車両へ向かって進行する。従来装置は、当該反射波を受信する。従来装置は、放射した電波及び受信した反射波に関する物理量に基づいて、当該立体物に関する物理量(自車両に対する立体物の位置及び自車両に対する立体物の速度など)を演算する。従来装置は、その演算結果に基づいて、立体物が自車両に接近していると判定した場合に、運転者に対し、所定の警報を発する。
【先行技術文献】
【特許文献】
【0003】
特開平6―258426号公報
【発明の概要】
【0004】
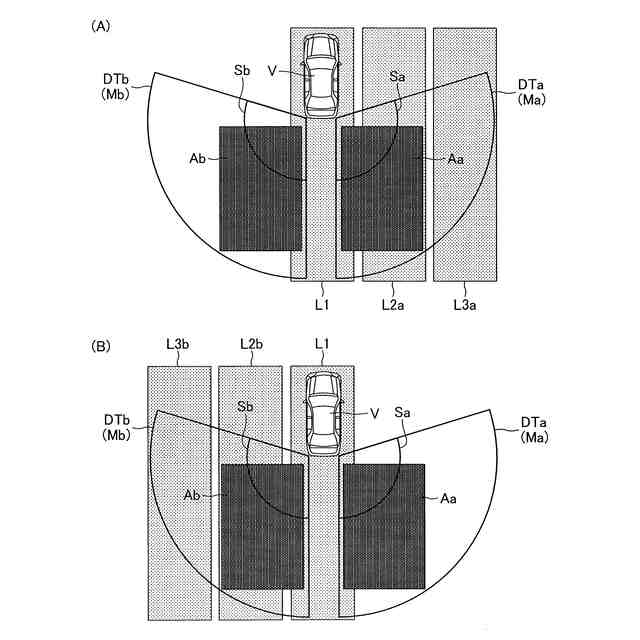
上記のように、従来装置は、立体物を検知するための電波を、自車両の後方へ放射している。従来装置では、放射された電波の到達可能な領域(自車両の斜め後方に延びる扇形の領域の半径(電波の到達可能距離))が上記の警報を発する対象の領域(以下、警報対象領域と称呼する。)に相当する。一般に、当該電波の到達可能距離は、標準的な走行レーンの幅(3.5メートル)よりも大きい。例えば、電波の到達可能距離は10メートル程度である。
【0005】
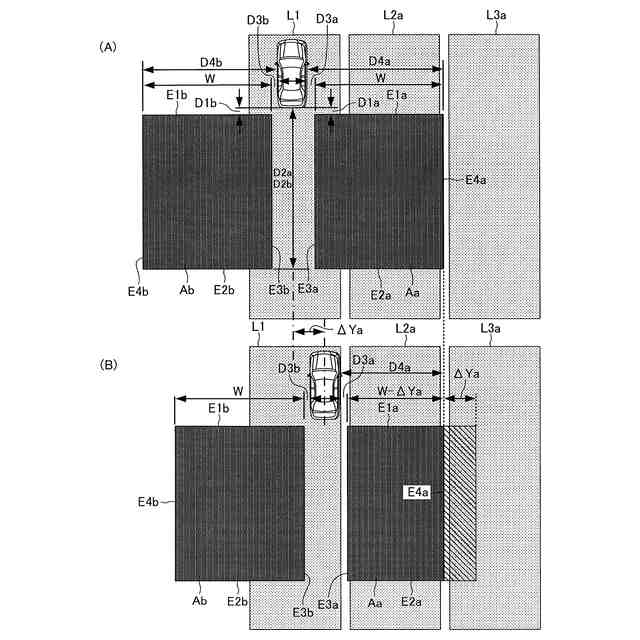
例えば、第一レーン(左レーン)、第二レーン(中央レーン)及び第三レーン(右レーン)からなる道路のうちの第一レーンを自車両が走行している場合、自車両から右斜め後方へ放射された電波は、少なくとも、第二レーンと第三レーンの境界部付近まで到達する。つまり、平面視において、警報対象領域が、第二レーンに重なっている。
【0006】
ところで、例えば、先行車両を追い越すために、運転者が自車両を第一レーンから第二レーンへ移動(車線変更)させようとする際、警報対象領域のうちの第二レーンに重なった領域内に他車両が存在しているシーンが想定される。このシーンにおいて、従来装置は、当該他車両を検知して警報を発する。これにより、運転者は、当該他車両と自車両との接触を回避するために、当該車線変更を中止(又は延期)することができる。
【0007】
一方、第二レーンに他車両が存在しなければ、警報が発せられない。そのため、運転者が自車両を第二レーン側へ移動させ始めた場合、当該自車両の移動(横方向への変位)に伴い、警報対象領域も右横方向へ平行移動する。その過程で、警報対象領域の端部が第三レーンに重なる場合がある。当該警報対象領域の端部内(第三レーンに重なった領域内)に他車両が存在するシーンが想定される。このシーンにおいて、従来装置は、当該他車両を検知して警報を発する。このシーンでは、当該他車両は、第一レーンから第二レーンへの自車両の移動(車線変更)に支障を来す可能性は低い。それにも関わらず、従来装置により警報が発せられる。そのため、自車両の運転者は、当該警報を煩わしく感じる虞がある。
【0008】
本発明の目的の一つは、自車両の斜め後方に立体物が存在する場合に警報を発する運転支援装置であって、本来不要な警報を抑制可能な運転支援装置を提供することにある。
【0009】
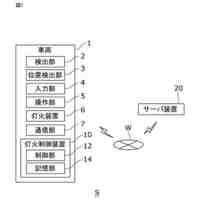
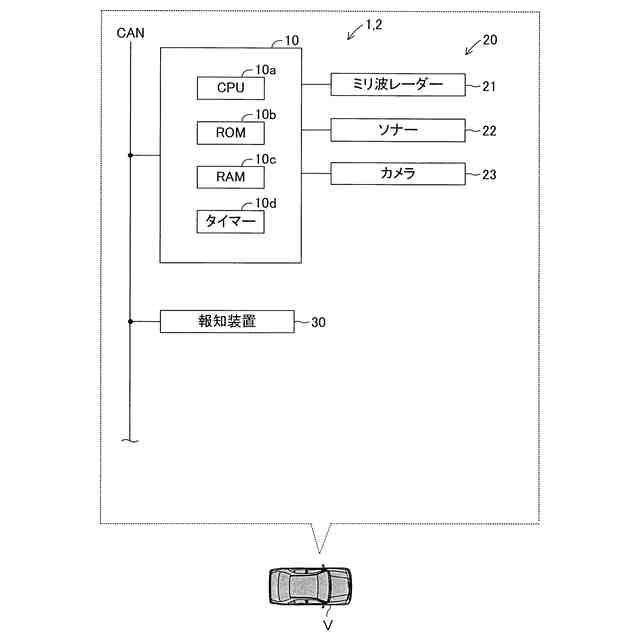
上記課題を解決するために、本発明の運転支援装置(1)は、
自車両(V)の周囲に存在する物標に関する情報を取得する車載センサ(20)と、
自車両の斜め後方にて前後方向に延びる帯状の警報対象領域(Aa,Ab)内に立体物が存在する場合に警報が発せられるように報知装置(30)を制御するプロセッサ(10)と、
を備える。
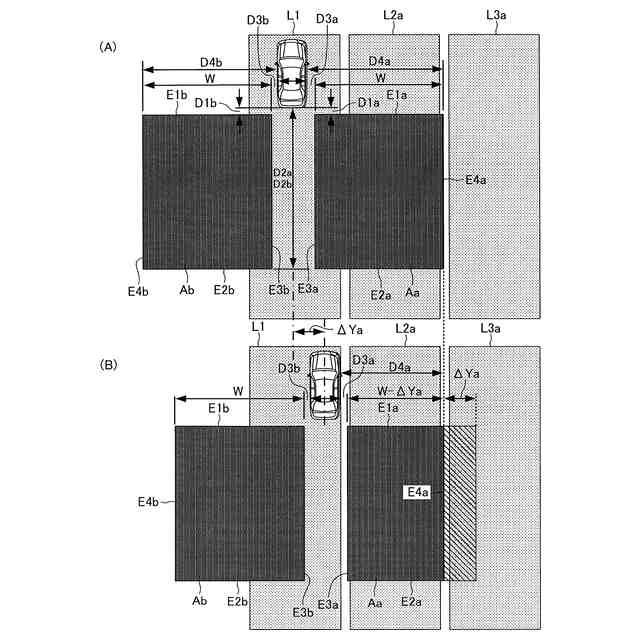
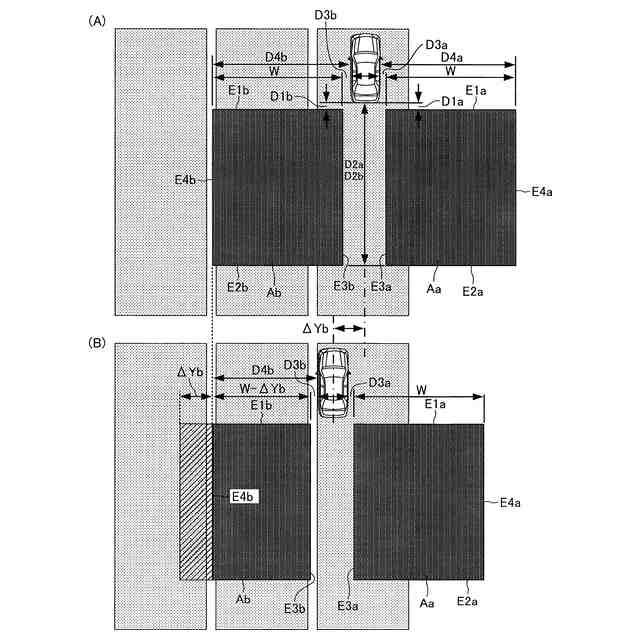
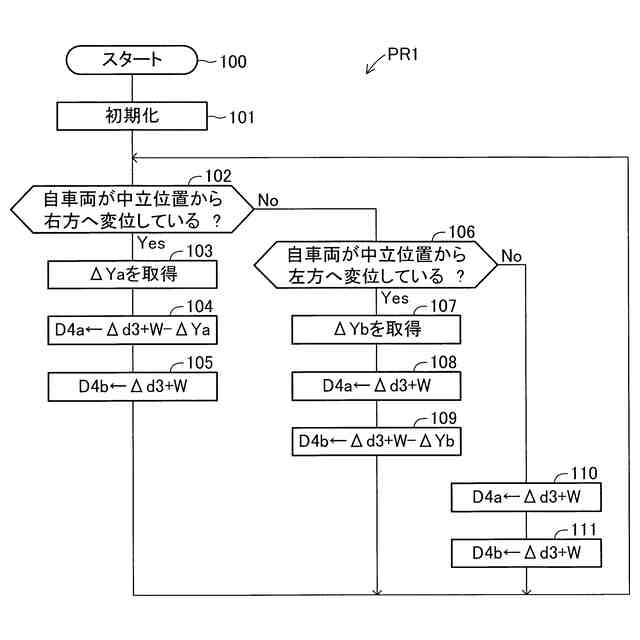
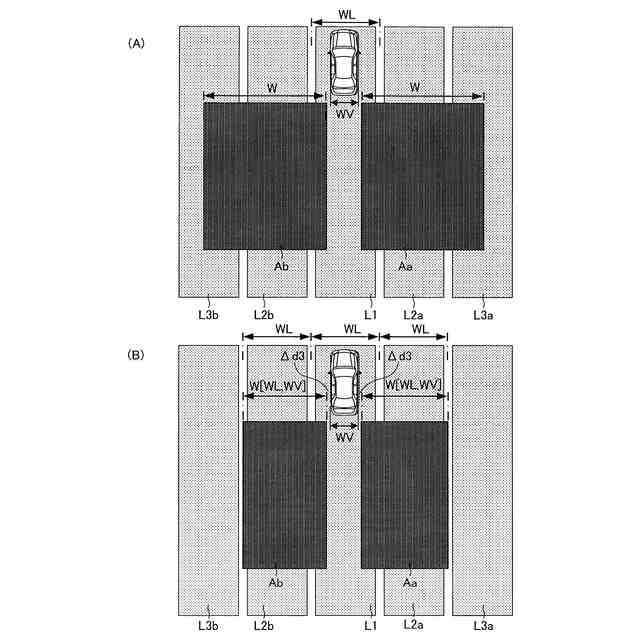
前記プロセッサは、
自車両が第一レーン(L1)の幅方向における中央部を走行している場合に、前記警報対象領域の長辺であって自車両側に位置する第一長辺(E3a,E3b)と自車両との横方向距離(D3a,D3b)を第一所定値(Δd3)に設定するとともに、前記警報対象領域の長辺であって自車両とは反対側に位置する第二長辺(E4a,E4b)と自車両との横方向距離(D4a,D4b)を第二所定値(Δd4[0])に設定し、
自車両が前記第一レーンの幅方向における中央部から、当該第一レーンに隣接する第二レーン(L2a,L2b)側へ変位した場合に、前記第一長辺と自車両との横方向距離を前記第一所定値に設定するとともに、前記第二長辺と自車両との横方向距離を前記第二所定値よりも小さい値(Δd4[ΔYa],Δd4[ΔYb])に設定する、
ように構成される。
【0010】
また、本発明に係る運転支援方法は、
自車両の周囲に存在する物標に関する情報を取得する情報取得ステップと、
自車両の斜め後方にて前後方向に延びる帯状の警報対象領域内に立体物が存在する場合に警報が発せられるように報知装置を制御する報知ステップと、
を含む。
前記報知ステップは、
自車両が第一レーンの幅方向における中央部を走行している場合に、前記警報対象領域の長辺であって自車両側に位置する第一長辺と自車両との横方向距離を第一所定値に設定するとともに、前記警報対象領域の長辺であって自車両とは反対側に位置する第二長辺と自車両との横方向距離を第二所定値に設定するステップと、
自車両が前記第一レーンの幅方向における中央部から、当該第一レーンに隣接する第二レーン側へ変位した場合に、前記第一長辺と自車両との横方向距離を前記第一所定値に設定するとともに、前記第二長辺と自車両との横方向距離を前記第二所定値よりも小さい値に設定するステップと、
を含む、ように構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
モータ
5日前
トヨタ自動車株式会社
モータ
5日前
トヨタ自動車株式会社
モータ
2日前
トヨタ自動車株式会社
パネル
4日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
製造装置
9日前
トヨタ自動車株式会社
関節機構
10日前
トヨタ自動車株式会社
予測方法
10日前
トヨタ自動車株式会社
内燃機関
5日前
トヨタ自動車株式会社
回転電機
5日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
内燃機関
1日前
トヨタ自動車株式会社
蓄電セル
5日前
トヨタ自動車株式会社
情報機器
4日前
トヨタ自動車株式会社
電源装置
4日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
二次電池
10日前
トヨタ自動車株式会社
電動車両
8日前
トヨタ自動車株式会社
剥離装置
9日前
トヨタ自動車株式会社
二次電池
8日前
トヨタ自動車株式会社
内燃機関
8日前
トヨタ自動車株式会社
エンジン
9日前
トヨタ自動車株式会社
ドローン
9日前
トヨタ自動車株式会社
駆動装置
1日前
トヨタ自動車株式会社
水系電池
1日前
トヨタ自動車株式会社
防曇装置
1日前
トヨタ自動車株式会社
誘導電動機
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電池パック
9日前
トヨタ自動車株式会社
電池パック
8日前
トヨタ自動車株式会社
カバー部材
4日前
トヨタ自動車株式会社
差動制限装置
9日前
トヨタ自動車株式会社
灯火制御装置
9日前
トヨタ自動車株式会社
車両前部構造
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ