TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025086142
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023199995
出願日
2023-11-27
発明の名称
移動体制御装置及び移動体制御システム
出願人
矢崎総業株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/247 20240101AFI20250530BHJP(制御;調整)
要約
【課題】工程レイアウトが変更される場合でも、作業者の負担を増大させずに、移動体を自動走行させることができる移動体制御装置及び移動体制御システムを提供する。
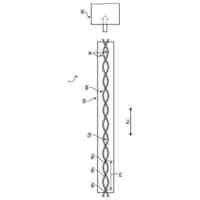
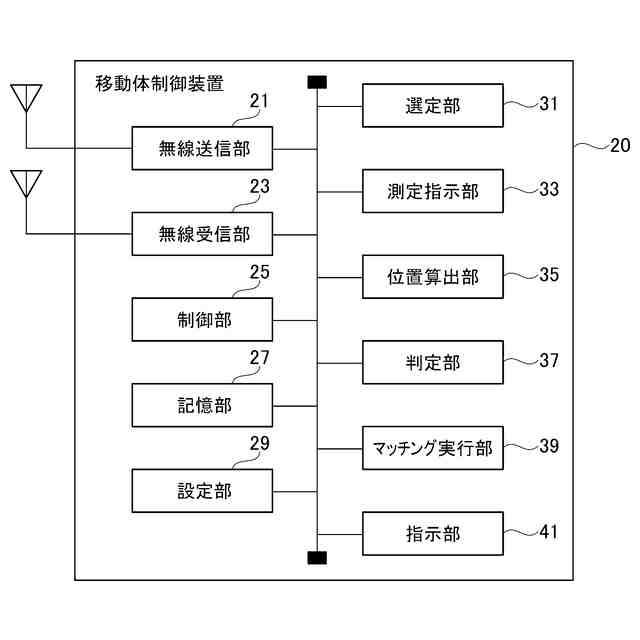
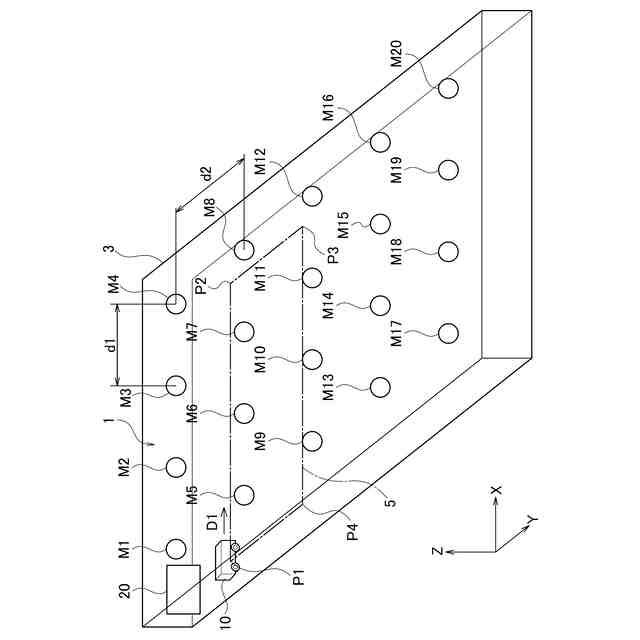
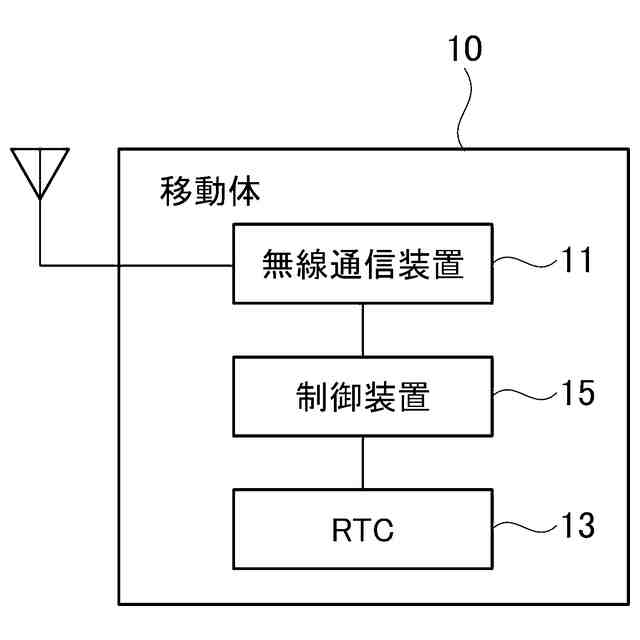
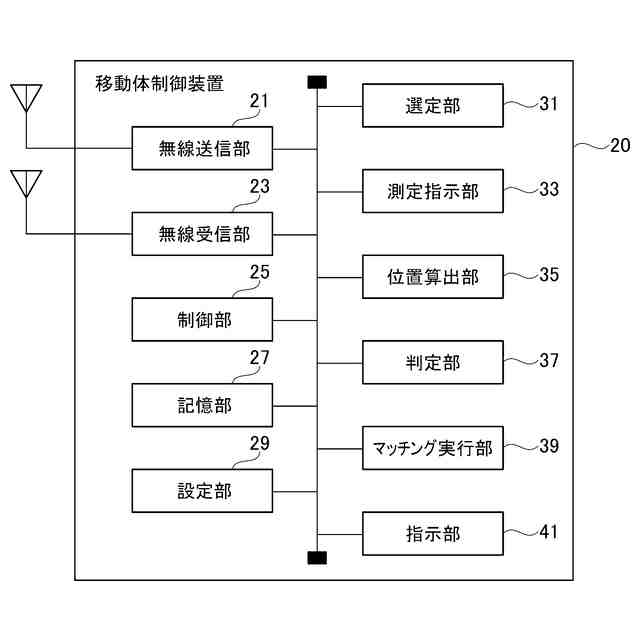
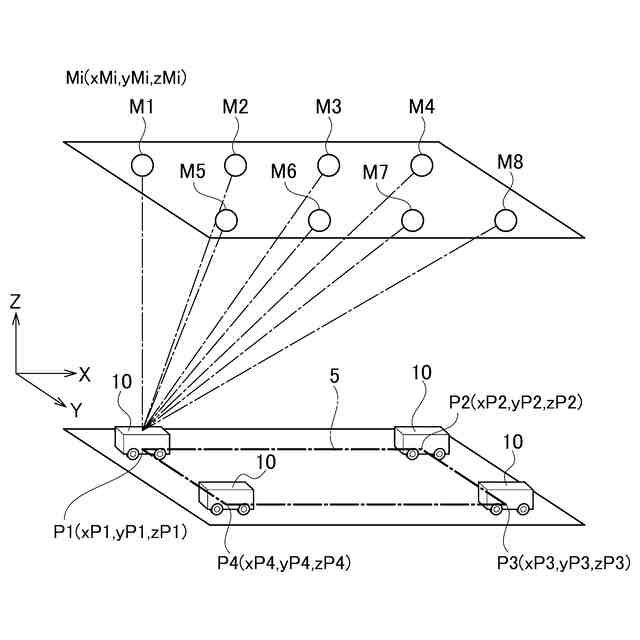
【解決手段】移動体制御装置20は、移動体10が自動走行可能なエリアに配置された複数の無線マーカーMと通信可能であり、設定部29、測定指示部33、推定部、及び走行指示部を備える。設定部29は、移動体10の走行経路5に関する地図情報を設定する。測定指示部33は、使用対象の無線マーカーMと移動体10との間の距離を測定するように、使用対象の無線マーカーMに指示する。推定部は、測定された距離を含む距離情報を使用対象の無線マーカーMから取得して、取得した距離情報に基づいて、移動体10の位置を推定する。走行指示部は、推定した移動体10の位置と地図情報とに基づいて、走行経路5に沿って、移動体10を自動走行させる。
【選択図】図3
特許請求の範囲
【請求項1】
移動体が自動走行可能なエリアに配置された複数の無線マーカーと通信可能な移動体制御装置であって、
前記移動体の走行経路に関する地図情報を設定する設定部と、
前記走行経路に基づいて、前記複数の無線マーカーのうち、使用対象の無線マーカーを複数選定する選定部と、
前記使用対象の無線マーカーと前記移動体との間の距離を測定するように、前記使用対象の無線マーカーに指示する測定指示部と、
測定された前記距離を含む距離情報を前記使用対象の無線マーカーから取得して、取得した前記距離情報に基づいて、前記移動体の位置を推定する推定部と、
推定した前記移動体の位置と前記地図情報とに基づいて、前記走行経路に沿って、前記移動体を自動走行させる走行指示部と、
を備える、移動体制御装置。
続きを表示(約 2,000 文字)
【請求項2】
前記設定部は、前記推定部が前記移動体の位置を推定する際に許容される誤差範囲を設定し、
前記測定指示部は、前記誤差範囲の大きさに応じて、無線ローカルエリアネットワーク(WLAN)フレームを用いた測距と、WLANセンシングを用いた測距とのうちの一方を選定して、選定した前記一方を用いて前記距離を測定するように、前記使用対象の無線マーカーに指示する、請求項1に記載の移動体制御装置。
【請求項3】
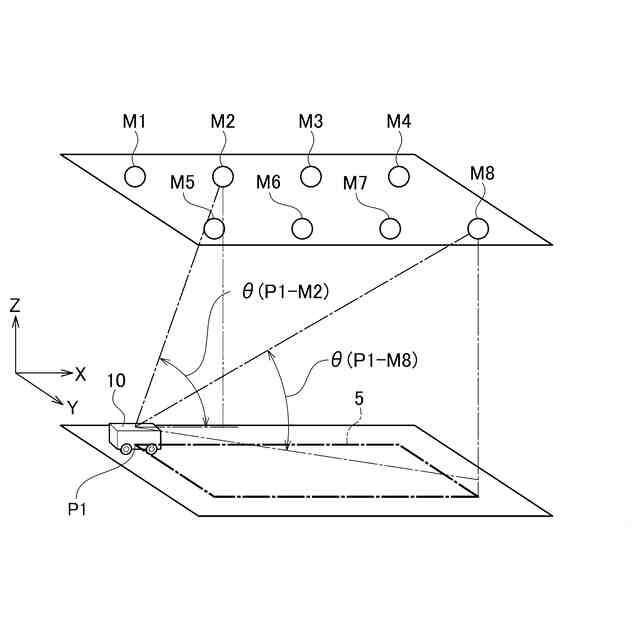
前記走行経路において、前記距離が測定される複数の測定点が設定されており、
前記選定部は、前記複数の測定点での前記複数の無線マーカーの仰俯角の大きさに基づいて、前記複数の無線マーカーのうち、前記使用対象の無線マーカーを複数選定する、請求項1に記載の移動体制御装置。
【請求項4】
前記選定部は、各無線マーカーにおいて、前記複数の測定点での仰俯角のうち、最も大きい仰俯角を選定し、
前記選定部は、前記複数の無線マーカーのうち、閾値よりも大きい仰俯角を有する無線マーカーを、前記使用対象の無線マーカーとして複数選定し、
前記選定部は、仰俯角が大きい方から順に、所定数の使用対象の無線マーカーを第1測位グループとしてグループ化し、次の所定数の使用対象の無線マーカーを第2測位グループとしてグループ化し、
前記推定部は、前記第1測位グループに含まれる前記使用対象の無線マーカーから取得した第1距離情報に基づいて、前記移動体の位置を推定し、
前記推定部は、前記第2測位グループに含まれる前記使用対象の無線マーカーから取得した第2距離情報に基づいて、前記移動体の位置を推定し、
前記推定部は、前記第1測位グループにおける前記移動体の位置と、前記第2測位グループにおける前記移動体の位置との誤差が、所定の誤差範囲内に含まれる場合に、前記走行指示部は、前記第1測位グループにおける前記移動体の位置と、前記地図情報とに基づいて、前記移動体を自動走行させる、請求項3に記載の移動体制御装置。
【請求項5】
前記測定指示部は、前記誤差範囲が1m以上である場合、無線ローカルエリアネットワーク(WLAN)フレームを用いて、前記使用対象の無線マーカーと前記移動体との間の距離を測定するように、前記使用対象の無線マーカーに指示し、
前記測定指示部は、前記誤差範囲が1m未満である場合、WLANセンシングを用いて、前記使用対象の無線マーカーと前記移動体との間の距離を測定するように、前記使用対象の無線マーカーに指示する、請求項4に記載の移動体制御装置。
【請求項6】
前記複数の測定点は、前記走行経路において、前記移動体の進行方向が変更される地点に設定されている、請求項3に記載の移動体制御装置。
【請求項7】
移動体と、
前記移動体が自動走行可能なエリアに配置される複数の無線マーカーと、
前記複数の無線マーカーと通信可能な移動体制御装置と、
を備え、
前記移動体制御装置は、
前記移動体の走行経路に関する地図情報を設定する設定部と、
前記走行経路に基づいて、前記複数の無線マーカーのうち、使用対象の無線マーカーを複数選定する選定部と、
前記使用対象の無線マーカーと前記移動体との間の距離を測定するように、前記使用対象の無線マーカーに指示する測定指示部と、
測定された前記距離を含む距離情報を前記使用対象の無線マーカーから取得して、取得した前記距離情報に基づいて、前記移動体の位置を推定する推定部と、
推定した前記移動体の位置と前記地図情報とに基づいて、前記走行経路に沿って、前記移動体を自動走行させる走行指示部と、
を備え、
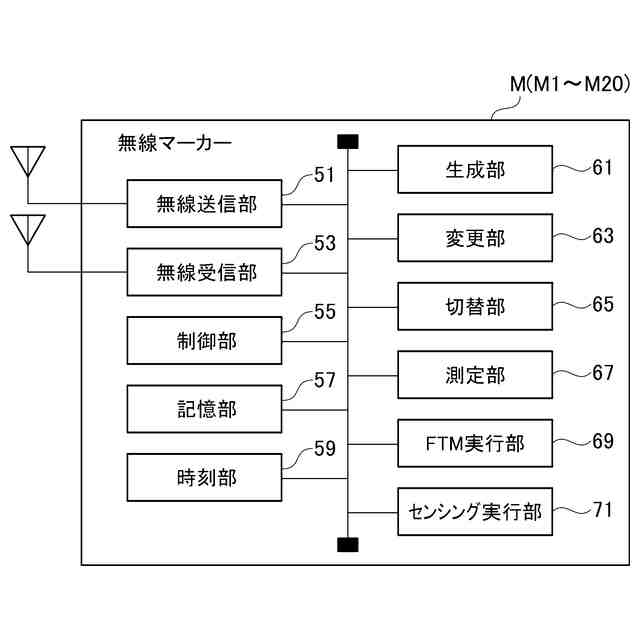
各無線マーカーは、
前記移動体制御装置からの指示に基づいて、前記移動体との距離を測定する測定部と、
測定した前記距離を含む前記距離情報を前記移動体制御装置に送信する送信部と、
を備える、移動体制御システム。
【請求項8】
前記設定部は、前記推定部が前記移動体の位置を推定する際に許容される誤差範囲を設定し、
前記測定指示部は、前記誤差範囲の大きさに応じて、無線ローカルエリアネットワーク(WLAN)フレームを用いた測距と、WLANセンシングを用いた測距とのうちの一方を選定して、選定した前記一方を用いて前記距離を測定するように、前記使用対象の無線マーカーに指示し、
前記測定部は、前記移動体制御装置からの指示に基づいて、選定した前記一方を用いて前記距離を測定する、請求項7に記載の移動体制御システム。
【請求項9】
前記複数の無線マーカーは、建物内の前記移動体が自動走行可能なエリアの天井に配置される、請求項7に記載の移動体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体制御装置及び移動体制御システムに関する。
続きを表示(約 910 文字)
【背景技術】
【0002】
従来、無人搬送車(AGV:Auto Guided Vehicle)などの移動体が、床面に敷設された磁気マーカーの磁気を検知して、走行経路に沿って自動で走行するシステムが知られている。
【0003】
特許文献1に開示されたシステムでは、走行経路のうち、経路が分岐する分岐エリアには、磁気マーカーとして第1磁気テープが敷設され、かつ、分岐エリア以外のエリアには、磁気マーカーとして第2磁気テープが敷設されている。第1磁気テープは、N極及びS極のうちの一方の磁極を帯びており、第2磁気テープは、N極及びS極のうちの他方の磁極を帯びている。
【0004】
このような構成により、移動体は、検知した磁気の時間変化量を導出し、導出した磁気の時間変化量に基づいて、分岐エリアへの自車の出入を判別することができる。
【先行技術文献】
【特許文献】
【0005】
特開2022-163855号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
近年、上述したシステムを導入して、ワイヤーハーネスの製造工程の自動化を図ることが考えられている。
【0007】
ワイヤーハーネスの製造工程では、車両の仕様などの設計変更に応じて、工程レイアウトが変更されることがある。
【0008】
しかしながら、上述したシステムでは、工程レイアウトの変更に伴って、磁気マーカーが工程設備によって隠される可能性がある。この場合、移動体は、磁気テープの磁気を検知することができず、自動走行できなくなる。
【0009】
この問題に対処するために、工程レイアウトを変更する度に、磁気マーカーを敷設し直すことが考えられるが、この場合、作業者の負担が増大する。
【0010】
このため、工程レイアウトが変更される場合でも、作業者の負担を増大させずに、移動体が自動走行できるように、更なる改善が求められていた。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
矢崎総業株式会社
端子台
1か月前
矢崎総業株式会社
組立体
1か月前
矢崎総業株式会社
端子台
1か月前
矢崎総業株式会社
端子台
1か月前
矢崎総業株式会社
端子金具
1か月前
矢崎総業株式会社
配索構造
23日前
矢崎総業株式会社
コネクタ
23日前
矢崎総業株式会社
コネクタ
23日前
矢崎総業株式会社
雌型端子
2か月前
矢崎総業株式会社
配索構造
23日前
矢崎総業株式会社
配索構造
23日前
矢崎総業株式会社
配索構造
23日前
矢崎総業株式会社
配索構造
23日前
矢崎総業株式会社
配索構造
23日前
矢崎総業株式会社
表示装置
1か月前
矢崎総業株式会社
コネクタ
2か月前
矢崎総業株式会社
給電装置
19日前
矢崎総業株式会社
コネクタ
25日前
矢崎総業株式会社
コネクタ
2か月前
矢崎総業株式会社
コネクタ
25日前
矢崎総業株式会社
コネクタ
26日前
矢崎総業株式会社
コネクタ
1か月前
矢崎総業株式会社
コネクタ
26日前
矢崎総業株式会社
コネクタ
25日前
矢崎総業株式会社
コネクタ
23日前
矢崎総業株式会社
コネクタ
1か月前
矢崎総業株式会社
コネクタ
19日前
矢崎総業株式会社
コネクタ
5日前
矢崎総業株式会社
コネクタ
5日前
矢崎総業株式会社
回路構造
19日前
矢崎総業株式会社
コネクタ
19日前
矢崎総業株式会社
コネクタ
1か月前
矢崎総業株式会社
コネクタ
5日前
矢崎総業株式会社
コネクタ
19日前
矢崎総業株式会社
プロテクタ
9日前
矢崎総業株式会社
プロテクタ
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ