TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025108848
公報種別
公開特許公報(A)
公開日
2025-07-24
出願番号
2024002300
出願日
2024-01-11
発明の名称
作業機械の周辺監視装置
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
B66C
13/00 20060101AFI20250716BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】作業機械の安全性を確保しつつ生産性を向上させることが可能な作業機械の周辺監視装置を提供する。
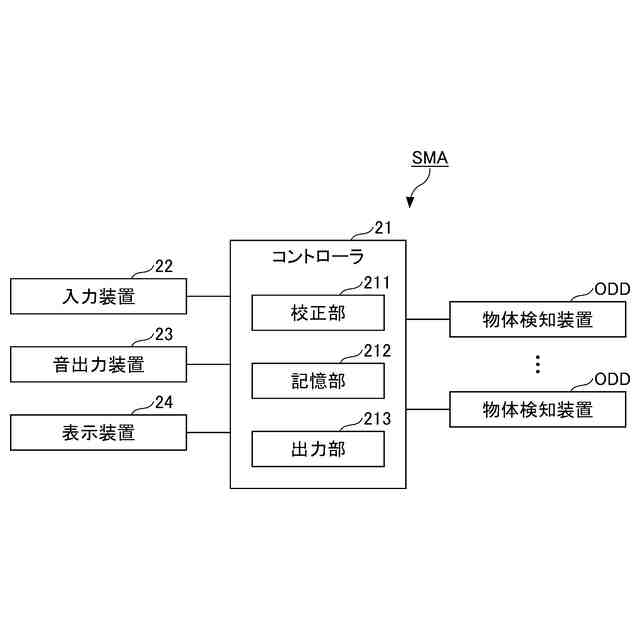
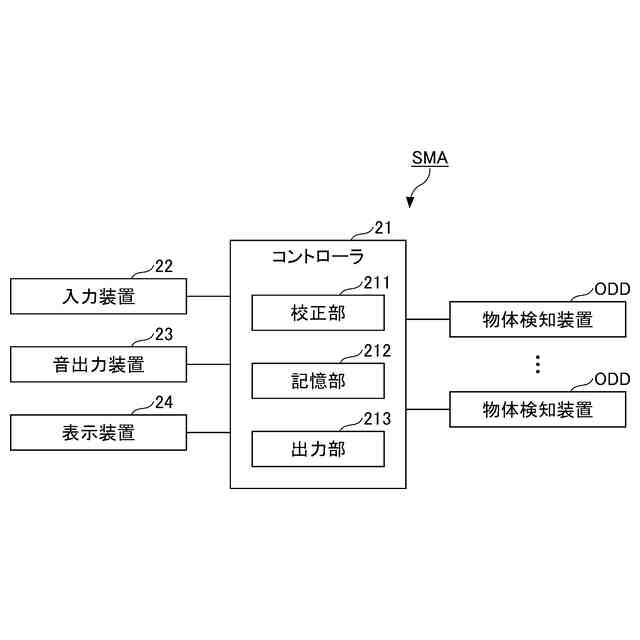
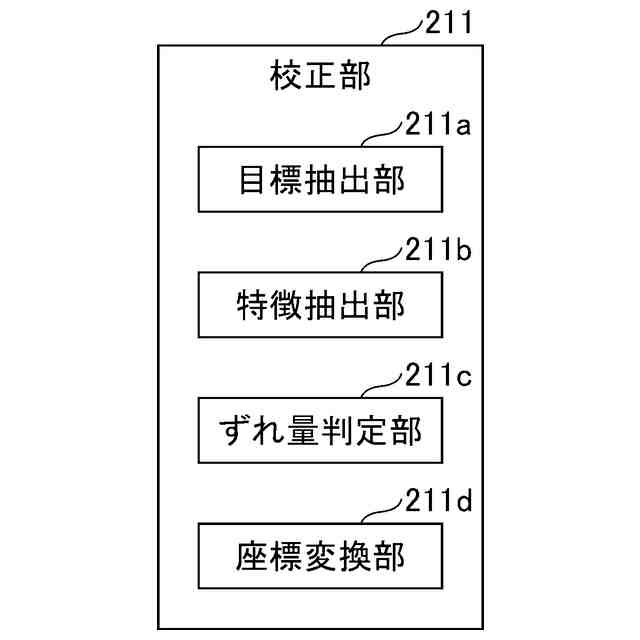
【解決手段】作業機械の周辺監視装置SMAは、作業機械の周囲の物体を検知する複数の物体検知装置ODDと、それら物体検知装置ODDの座標系を校正する校正部211と、を備える。校正部211は、物体検知装置ODDの座標系の校正が完了するまで、校正のための複数の校正アルゴリズムを処理時間又は手動操作が少ない順に順次実行する。
【選択図】図3
特許請求の範囲
【請求項1】
作業機械の周囲の物体を検知する複数の物体検知装置と、
前記複数の物体検知装置の座標系を校正する校正部と、を備え、
前記校正部は、前記校正が完了するまで前記校正のための複数の校正アルゴリズムを処理時間又は手動操作が少ない順に順次実行する、
作業機械の周辺監視装置。
続きを表示(約 760 文字)
【請求項2】
前記校正部は、前記複数の物体検知装置による同一物体の検知結果に基づいて前記複数の物体検知装置の検知結果の間のずれ量を算出し、前記ずれ量に基づいて前記校正の要否又は完了を判定する、
請求項1に記載の作業機械の周辺監視装置。
【請求項3】
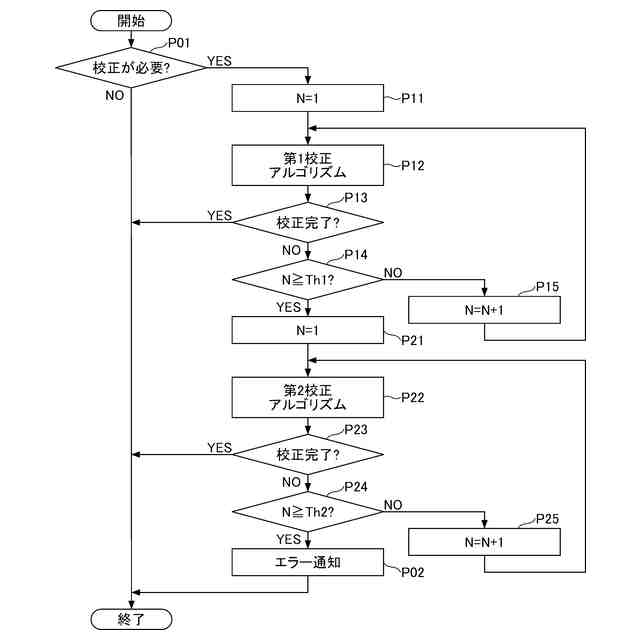
前記校正部は、前記複数の校正アルゴリズムにおいて実行中の校正アルゴリズムを所定の回数繰り返しても前記校正が完了しない場合に、前記複数の校正アルゴリズムにおける次の校正アルゴリズムを実行する、
請求項1に記載の作業機械の周辺監視装置。
【請求項4】
前記複数の校正アルゴリズムは、前記複数の物体検知装置の各々が検知した同一の物体の特徴点を手動操作により対応付けて座標変換を行う校正アルゴリズムを含む、
請求項1に記載の作業機械の周辺監視装置。
【請求項5】
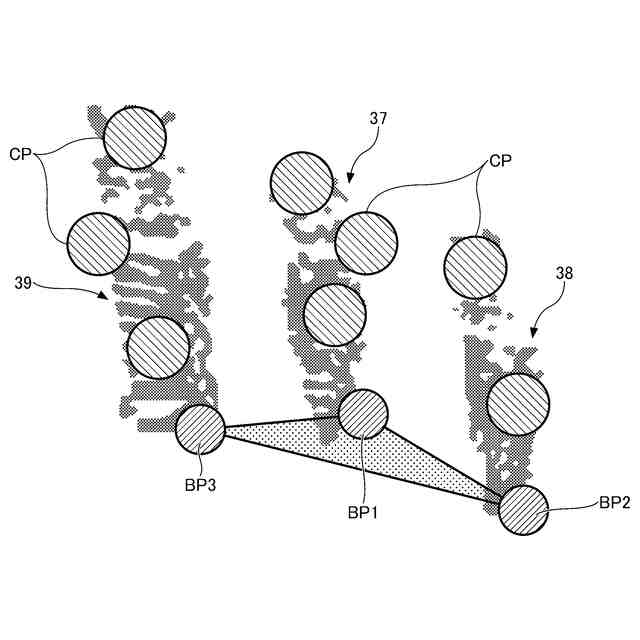
前記複数の校正アルゴリズムは、前記複数の物体検知装置の各々が検知した同一の三つ以上の物体の重心位置を地表面に投影した点を頂点とする多角形を、前記複数の物体検知装置の少なくとも二つの間で一致させる座標変換を行う校正アルゴリズムを含む、
請求項1に記載の作業機械の周辺監視装置。
【請求項6】
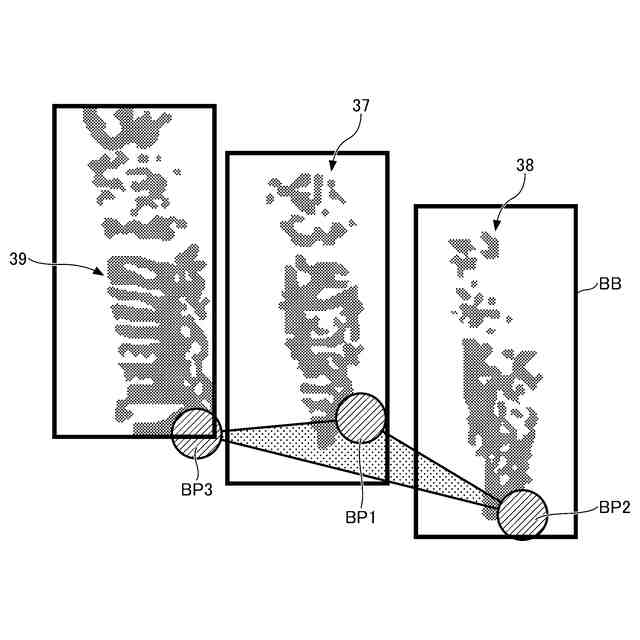
前記複数の校正アルゴリズムは、前記複数の物体検知装置の各々が検知した同一の物体を囲むバウンディングボックスの下端中央の点を、前記複数の物体検知装置の少なくとも二つの間で一致させる座標変換を行う校正アルゴリズムを含む、
請求項1に記載の作業機械の周辺監視装置。
【請求項7】
前記複数の物体検知装置による物体の検知結果を合成して出力する出力部を有する、
請求項1に記載の作業機械の周辺監視装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は作業機械の周辺監視システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、周囲表示システム及びそれを備えた作業機械が知られている(特許文献1参照)。特許文献1に記載された周囲表示システムは、合成映像を合成条件に基づいて生成し、表示装置に出力するコントローラを備えている。
【0003】
コントローラは、複数のカメラで撮影した複数の映像において、キャリブレーション処理に用いるための予め定めた形状のキャリブレーションマーカの位置をそれぞれ特定する。また、コントローラは、キャリブレーションマーカの特徴点の車体座標系における座標を複数の映像のそれぞれについて算出する。また、コントローラは、複数の映像におけるキャリブレーションマーカの特徴点の座標差を算出し、その座標差に基づいてキャリブレーション処理の要否を判定して、その判定結果を表示装置に出力する。
【先行技術文献】
【特許文献】
【0004】
特開2020-147962号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
作業機械は、例えば、荷や積載物を移動させたり搬送したりする作業アタッチメントを含むため、作業機械に搭載されて周囲の物体を検知する複数の物体検知装置の位置や姿勢が変動する場合がある。そのため、作業機械は、作業現場において、複数の物体検知装置の検知結果を融合するための校正が必要になる。
【0006】
特許文献1に記載された従来の周囲表示システムは、前述のキャリブレーション処理において、現場作業員の負担が増大したり、想定外に長時間を要したりして、生産性が低下するおそれがある。
【0007】
本開示は、作業機械の安全性を確保しつつ生産性を向上させることが可能な作業機械の周辺監視装置を提供する。
【課題を解決するための手段】
【0008】
本開示の一つの態様は、作業機械の周囲の物体を検知する複数の物体検知装置と、前記複数の物体検知装置の座標系を校正する校正部と、を備え、前記校正部は、前記校正が完了するまで前記校正のための複数の校正アルゴリズムを処理時間又は手動操作が少ない順に順次実行する、作業機械の周辺監視装置を提供する。
【発明の効果】
【0009】
本開示の上記の態様によれば、作業機械の安全性を確保しつつ生産性を向上させることが可能な作業機械の周辺監視装置を提供することができる。
【図面の簡単な説明】
【0010】
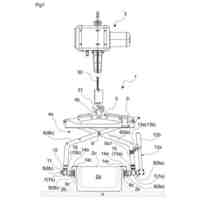
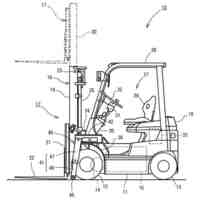
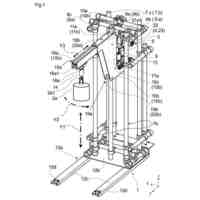
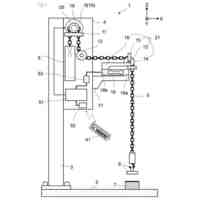
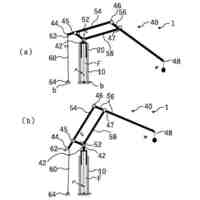
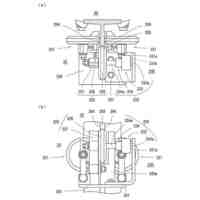
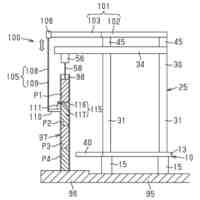
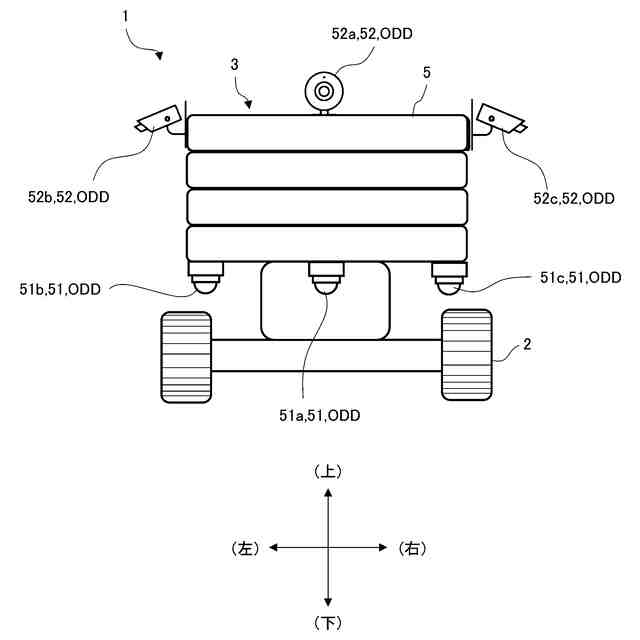
作業機械の一例であるクレーンの側面図である。
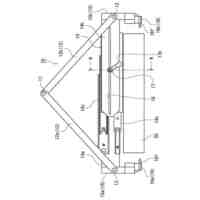
図1に示すクレーンの背面図である。
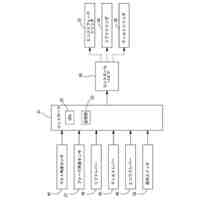
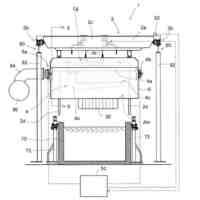
図1に示すクレーンに搭載された装置のブロック図である。
図3の校正部の詳細を示すブロック図である。
図3及び図4の校正部による校正処理の一例を示すフロー図である。
図5の校正処理における物体の配置例を示す模式的な平面図である。
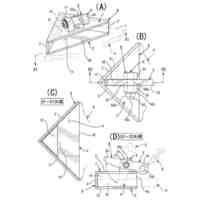
図5の第1校正アルゴリズムの一例を説明する図である。
図5の第2校正アルゴリズムの一例を説明する図である。
図5の第1校正アルゴリズムの一例を説明する図である。
図5の第2校正アルゴリズムの一例を説明する図である。
図5の校正処理の変形例を示すフロー図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自走手摺
11日前
個人
懸吊装置
10か月前
ユニパルス株式会社
吊具
1か月前
個人
海上コンテナ昇降装置
7か月前
ユニパルス株式会社
荷役装置
6か月前
ユニパルス株式会社
吊具装置
8か月前
水戸工業株式会社
吊り具
3か月前
株式会社豊田自動織機
荷役車両
7か月前
株式会社豊田自動織機
産業車両
8か月前
ユニパルス株式会社
リフト装置
2か月前
株式会社豊田自動織機
荷役車両
6か月前
ユニパルス株式会社
荷役助力装置
19日前
株式会社日本キャリア工業
昇降機
11か月前
ユニパルス株式会社
荷役助力装置
1か月前
大栄産業株式会社
クランプ
2か月前
ユニパルス株式会社
荷役助力装置
3か月前
白山工業株式会社
バランサ
4か月前
株式会社キトー
タイヤ用吊具
2か月前
個人
建築部材の吊り上げ装置
9か月前
株式会社ユピテル
システム等
3か月前
フジテック株式会社
エレベータ
6か月前
新英運輸株式会社
自動車用台車
2か月前
株式会社大林組
養生方法
10か月前
株式会社五十鈴製作所
搬送装置
1か月前
株式会社豊田自動織機
フォークリフト
5か月前
有限会社サエキ
玉掛用器具
7か月前
白山工業株式会社
腕重量補償機構
9か月前
株式会社キトー
吊具
10か月前
株式会社タダノ
高所作業車
9か月前
フジテック株式会社
エスカレータ
3か月前
中坪造園有限会社
吊り荷降ろし具
2か月前
大和ハウス工業株式会社
パネル吊具
19日前
株式会社スギヤス
車両整備用リフト
7か月前
株式会社スギヤス
車両整備用リフト
7か月前
株式会社スギヤス
車両整備用リフト
7か月前
株式会社タダノ
クレーン装置
6か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ