TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025120865
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024015996
出願日
2024-02-05
発明の名称
隊列走行制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
F16H
61/02 20060101AFI20250808BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】隊列走行に参加している追従車両が先頭車両に速やかに追従する駆動力を得るためのギヤ段へ変速を予め実行することができ、隊列走行の乱れを抑制することができる隊列走行制御装置を提供する。
【解決手段】隊列参加時変速制御部140により、先頭車両12leの目標加速度(=要求駆動トルクTrdem)及び目標車速Vtに基づいて、自車(追従車両12fo)の自動変速機64の目標ギヤ段Gshtを判定し、目標ギヤ段Gshtと自車の実際のギヤ段Gshとが異なる場合に、自車の自動変速機64のギヤ段Gshが目標ギヤ段Gshtへ予め切り替えられる。これにより、隊列走行に参加している追従車両12foの変速をその先頭車両12leに追従する駆動力を得るためのギヤ段へ予め実行することができ、隊列走行の乱れが抑制される。
【選択図】図2
特許請求の範囲
【請求項1】
自動運転による複数の車両による隊列走行に際して、先頭車両の走行状態から追従車両の自動変速機の変速を自動的に切り替える隊列走行制御装置であって、
前記先頭車両の目標加速度及び目標車速に基づいて、前記追従車両の自動変速機の目標ギヤ段を判定し、前記目標ギヤ段と前記追従車両の自動変速機の実際のギヤ段とが異なる場合に、前記追従車両の自動変速機の実際のギヤ段を前記目標ギヤ段へ予め切り替える隊列参加時変速制御部を、備える
ことを特徴とする隊列走行制御装置。
続きを表示(約 210 文字)
【請求項2】
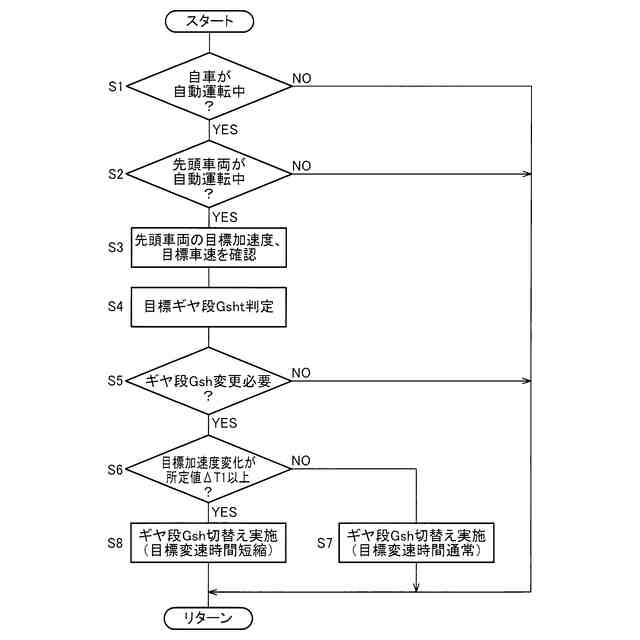
前記隊列参加時変速制御部は、前記先頭車両の目標加速度の変化が所定値を下まわる場合には、第2変速速度で前記追従車両の自動変速機の実際のギヤ段を前記目標ギヤ段へ切り替え、前記先頭車両の目標加速度の変化が前記所定値以上である場合には、前記第2変速速度よりも高い第1変速速度で前記追従車両の自動変速機の実際のギヤ段を前記目標ギヤ段へ切り替える
ことを特徴とする請求項1に記載の隊列走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、先頭車両と追従車両とから成る隊列参加車両の自動変速機の変速を制御することで、各車両の変速タイミングを最適化し、車間距離がばらつくことを抑制する隊列走行制御装置に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
先頭車両とその先頭車両に対して所定の車間距離ずつ隔てて1列で自動運転で追従する追従車両とから成る車両の隊列走行に際して、先頭車両の走行状態(加減速要求)から変速の要否を判断し、変速が必要な場合には、後方の車両から先に自動変速機の変速を実行することで、隊列走行に参加している車両群の変速タイミングを揃えて、車間距離がばらつくことを抑制する隊列走行制御装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-114386号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の隊列走行制御装置では、各車両の変速のタイミングを揃えると、追従車両において追従のための駆動力を得るためのギヤ段への切り替えが最適な変速タイミングから遅れるため、追従車両において速やかに追従するために要求される駆動力の実現が遅れる可能性があった。たとえば、先頭車両の加減速要求を受けてから追従車両の変速が開始されるため、最適な加速度が得られるまでに遅延が生じていた。このような遅延は、車車間通信を介して隊列走行が制御される場合には、追従車両の加減速の遅れを誘発させ、隊列走行の乱れを生じる可能性があった。
【0005】
本発明は以上の事情を背景として為されたもので、その目的とするところは、隊列走行に参加している追従車両が先頭車両に速やかに追従する駆動力を得るためのギヤ段へ変速を予め実行することができ、隊列走行の乱れを抑制することができる隊列走行制御装置を提供することにある。
【課題を解決するための手段】
【0006】
第1発明の要旨とするところは、(a)自動運転による複数の車両による隊列走行に際して、先頭車両の走行状態から追従車両の自動変速機の変速を自動的に切り替える隊列走行制御装置であって、(b)前記先頭車両の目標加速度及び目標車速に基づいて、前記追従車両の自動変速機の目標ギヤ段を判定し、前記目標ギヤ段と前記追従車両の自動変速機の実際のギヤ段とが異なる場合に、前記追従車両の自動変速機の実際のギヤ段を前記目標ギヤ段へ予め切り替える隊列参加時変速制御部を、備えることにある。
【0007】
第2発明の要旨とするところは、第1発明において、前記隊列参加時変速制御部は、前記先頭車両の目標加速度の変化が所定値を下まわる場合には、第2変速速度で前記追従車両の自動変速機の実際のギヤ段を前記目標ギヤ段へ切り替え、前記先頭車両の目標加速度の変化が前記所定値以上である場合には、前記第2変速速度よりも高い第1変速速度で前記追従車両の自動変速機の実際のギヤ段を前記目標ギヤ段へ切り替えることにある。
【発明の効果】
【0008】
第1発明の隊列走行制御装置においては、隊列参加時変速制御部により、先頭車両の目標加速度及び目標車速に基づいて、追従車両の自動変速機の目標ギヤ段を判定し、目標ギヤ段と追従車両の実際のギヤ段とが異なる場合に、追従車両の自動変速機の実際のギヤ段が目標ギヤ段へ予め切り替えられる。これにより、隊列走行に参加している追従車両の変速を、その先頭車両に追従する駆動力を得るためのギヤ段へ予め実行することができ、隊列走行の乱れが抑制される。
【0009】
第2発明の隊列走行制御装置においては、隊列参加時変速制御部は、先頭車両の目標加速度の変化が所定値を下まわる場合には、第2変速速度で追従車両の自動変速機のギヤ段を目標ギヤ段へ切り替え、先頭車両の目標加速度の変化が前記所定値以上である場合には、第2変速速度よりも高い第1変速速度で追従車両の自動変速機のギヤ段を目標ギヤ段へ切り替える。これにより、隊列走行に参加している追従車両の変速が先頭車両に追従する十分な駆動力を速やかに得るために、たとえば手動運転状態の第2変速速度よりも高い第1変速速度で速やかに実行されるので、隊列走行の乱れが抑制される。
【図面の簡単な説明】
【0010】
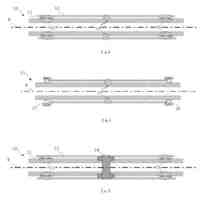
本発明の一実施例である隊列走行システムの基本構成を説明する概略図である。
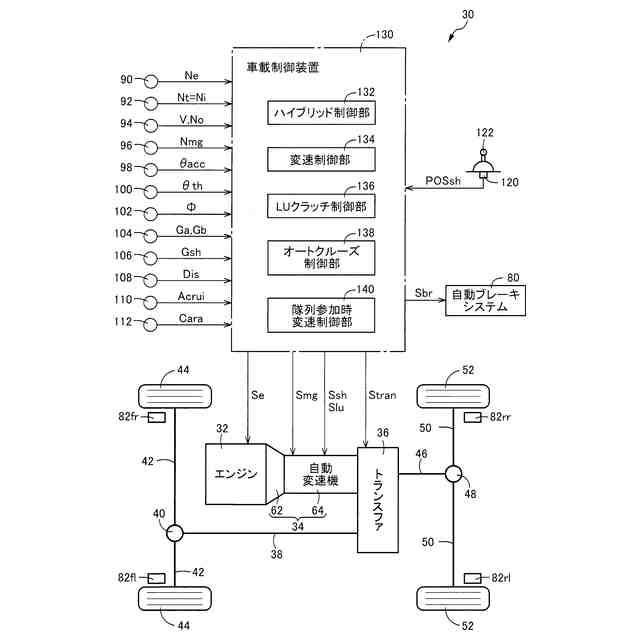
図1の隊列参加車両として用いることができる車両の一例を説明する図で、駆動系統の制御機能および要部を示した図である。
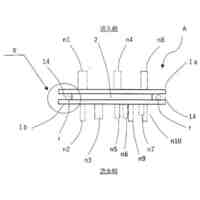
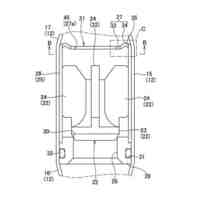
図2の車両の動力伝達装置の具体例を説明する骨子図である。
図3の動力伝達装置に備えられた有段式自動変速機の複数のギヤ段とそれを成立させるための係合装置の係合開放状態との関係を示した係合作動表である。
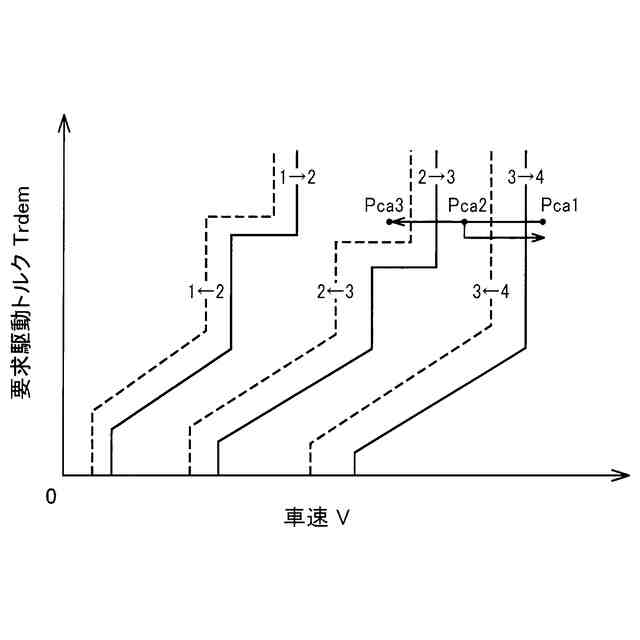
図2の車両の車載制御装置が機能的に備えている変速制御部が、図3の変速部の変速制御で用いる変速マップの一例を説明する図である。
図2の車両の車載制御装置が機能的に備えているLUクラッチ制御部が、ロックアップ制御で用いるLUクラッチ切替マップの一例を説明する図である。
図1のサーバが機能的に備えている隊列変速制御部によって実行される隊列変速制御を具体的に説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
流路体
7か月前
個人
ホース保持具
4か月前
個人
回転伝達機構
13日前
個人
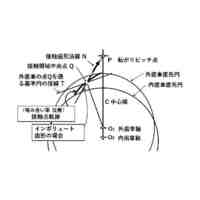
差動歯車用歯形
1か月前
個人
トーションバー
4か月前
株式会社不二工機
電磁弁
3か月前
個人
固着具と成形品部材
6か月前
個人
ボルトナットセット
5か月前
個人
地震の揺れ回避装置
26日前
株式会社不二工機
電磁弁
1か月前
個人
回転式配管用支持具
5か月前
株式会社アイシン
駆動装置
7か月前
株式会社オンダ製作所
継手
6か月前
カヤバ株式会社
ダンパ
1か月前
柿沼金属精機株式会社
分岐管
4日前
カヤバ株式会社
緩衝器
1か月前
カヤバ株式会社
緩衝器
1か月前
カヤバ株式会社
ダンパ
1か月前
株式会社ミクニ
弁装置
6か月前
個人
ベルトテンショナ
5か月前
株式会社三協丸筒
枠体
4か月前
カヤバ株式会社
緩衝器
5か月前
株式会社ミクニ
弁装置
6か月前
カヤバ株式会社
緩衝装置
6か月前
個人
固着具と固着具の固定方法
6か月前
株式会社不二工機
電動弁
4か月前
株式会社ナジコ
自在継手
6か月前
個人
固着具と固着具の固定方法
4か月前
株式会社フジキン
ボールバルブ
2か月前
個人
固着具と固着具の固定方法
2か月前
株式会社不二工機
逆止弁
6か月前
個人
固着具と固着具の固定方法
3か月前
株式会社タカギ
水栓装置
11日前
個人
固着具と固着具の固定方法
3か月前
個人
角型菅の連結構造及び工法
5か月前
日東電工株式会社
断熱材
4か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ