TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128481
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025148
出願日
2024-02-22
発明の名称
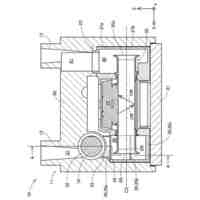
センサ及びセンサを備えるロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
G01D
5/241 20060101AFI20250827BHJP(測定;試験)
要約
【課題】高精度で検出物を検出できるセンサを提供する。
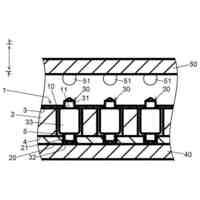
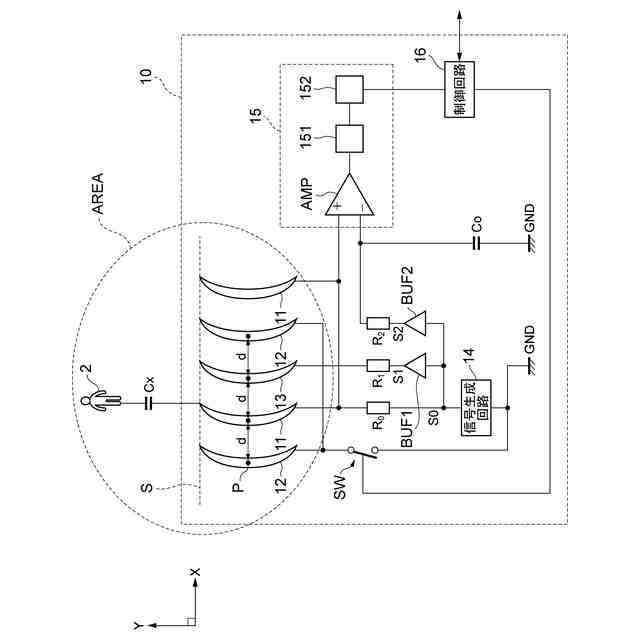
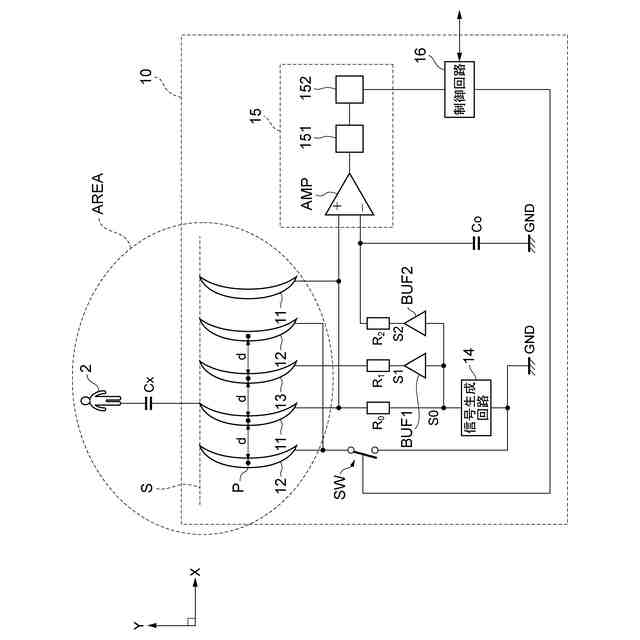
【解決手段】センサは、検出物を検出するための検出面に対して垂直な検出方向に沿って延在するように設けられる検出電極と、検出電極に並列して検出方向に沿って延在するように設けられる補正電極と、検出信号を生成し、生成した検出信号を検出電極に送信する信号生成回路と、検出電極の電位に従って前記検出物を検出する検出回路と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
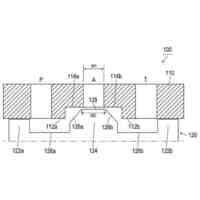
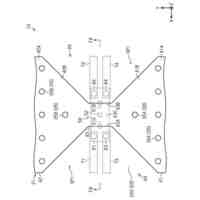
検出物を検出するための検出面に対して垂直な検出方向に沿って延在するように設けられる検出電極と、
前記検出電極に並列して前記検出方向に沿って延在するように設けられる補正電極と、
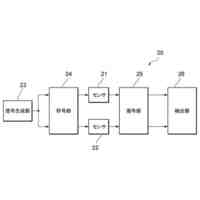
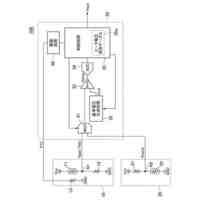
検出信号を生成し、生成した前記検出信号を前記検出電極に送信する信号生成回路と、
前記検出電極の電位に従って前記検出物を検出する検出回路と、
を備えるセンサ。
続きを表示(約 930 文字)
【請求項2】
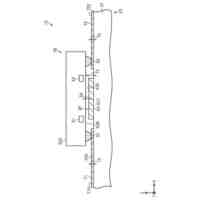
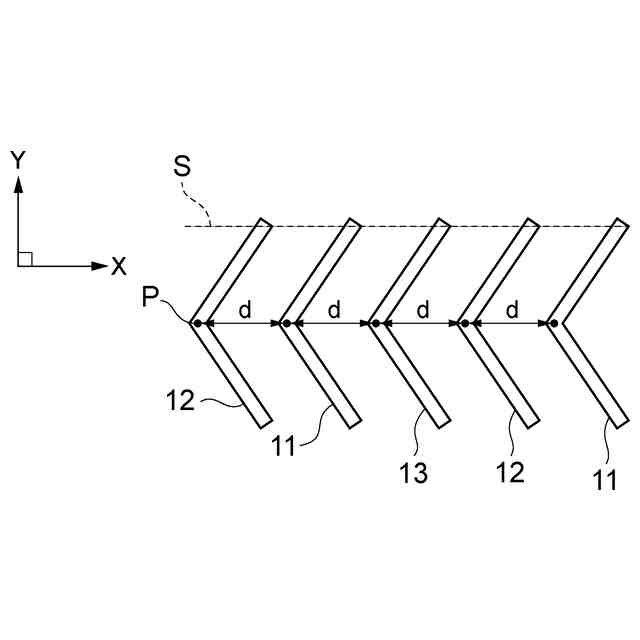
前記検出電極は、当該検出電極の部位の少なくとも一部が前記検出方向に対して垂直な方向に向かって湾曲又は屈曲するように形成されており、
前記補正電極は、当該補正電極の部位の少なくとも一部が前記検出電極の湾曲方向又は屈曲方向と同じ方向に湾曲又は屈曲するように形成されている、
ことを特徴とする請求項1に記載のセンサ。
【請求項3】
前記検出電極及び前記補正電極に並列して前記検出方向に沿って延在するように設けられ、前記検出信号と同電位の信号が供給されるアクティブシールド電極をさらに備え、
前記検出電極は、前記補正電極に対して前記検出方向に沿って右側に設けられ、
前記アクティブシールド電極は、前記検出電極に対して前記検出方向に沿って右側に設けられる、
ことを特徴とする請求項1に記載のセンサ。
【請求項4】
前記検出電極及び前記補正電極は、前記検出方向における位置のうち少なくとも一部が隣接する電極同士で等間隔になるように複数設けられている、
ことを特徴とする請求項1~3のうちいずれか一項に記載のセンサ。
【請求項5】
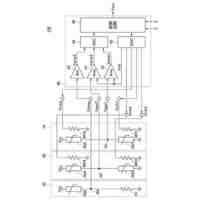
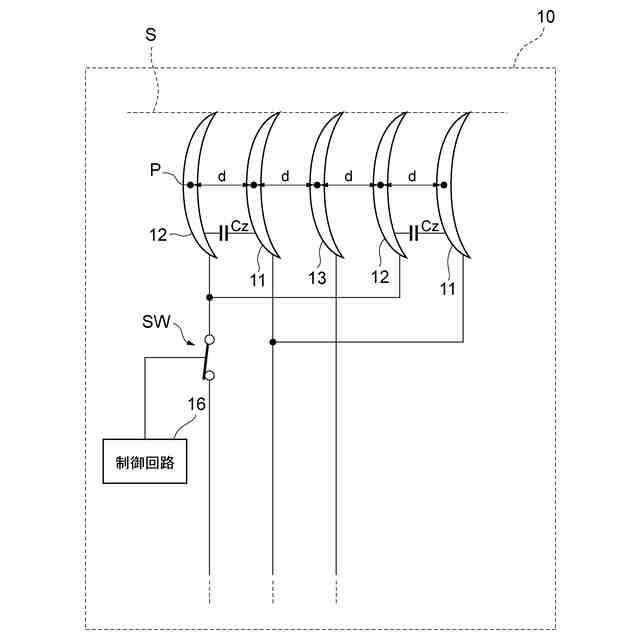
補正モード及び検出モードの2つの動作モードを有し、前記動作モードが前記補正モードである場合に前記検出電極及び前記補正電極の間の静電容量を検出させ、前記動作モードが前記検出モードである場合に前記検出物を検出させるように前記検出回路の動作を制御する制御回路、
をさらに備えることを特徴とする請求項1に記載のセンサ。
【請求項6】
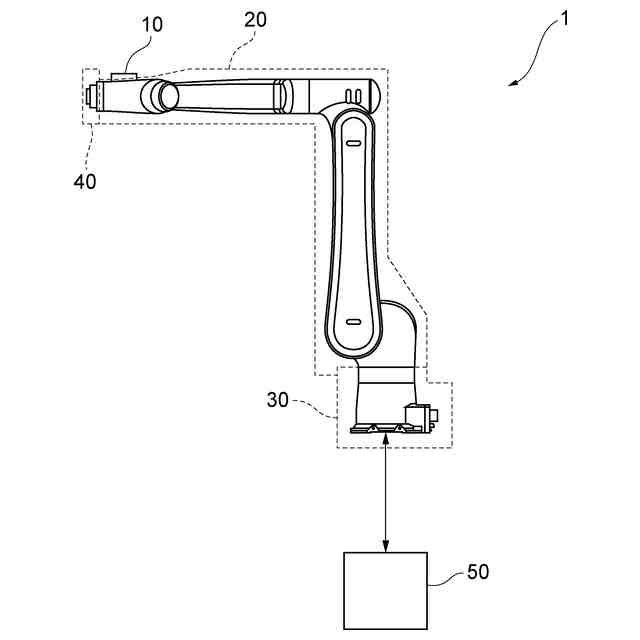
検出物を検出するための検出面に対して垂直な検出方向に沿って延在するように設けられる検出電極、前記検出電極に並列して前記検出方向に沿って延在するように設けられる補正電極、検出信号を生成し、生成した前記検出信号を前記検出電極に送信する信号生成回路、及び前記検出電極の電位に従って前記検出物を検出する検出回路を有するセンサと、
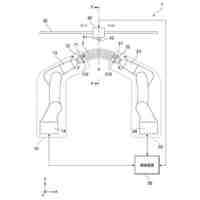
前記センサが設けられる可動式のアーム部と、
前記アーム部に接続されワークに対して作業を行う手首部と、
を備えるロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、センサ及びセンサを備えるロボットに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
従来から、検出物を検出するためのセンサを備えるロボットが知られている。
【0003】
これに関し、特許文献1には、他の物体との接近又は接触を検出するセンサであり、ロボットなどの可動装置の外装部材の外表面又は内表面に電極部が形成されているセンサが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2019-89165号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、静電容量が検出物及びセンサの間にある大気の温度及び湿度変化の影響を受け易く、高精度で検出物の接近を検出できないという問題があった。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、高精度で検出物を検出できるセンサ及びセンサを備えるロボットを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のセンサは、検出物を検出するための検出面に対して垂直な検出方向に沿って延在するように設けられる検出電極と、前記検出電極に並列して前記検出方向に沿って延在するように設けられる補正電極と、検出信号を生成し、生成した前記検出信号を前記検出電極に送信する信号生成回路と、前記検出電極の電位に従って前記検出物を検出する検出回路と、を備えるセンサ。
【0008】
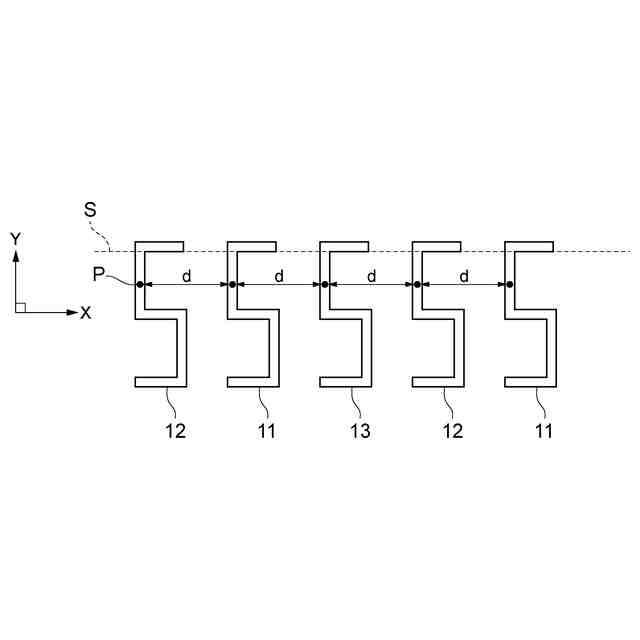
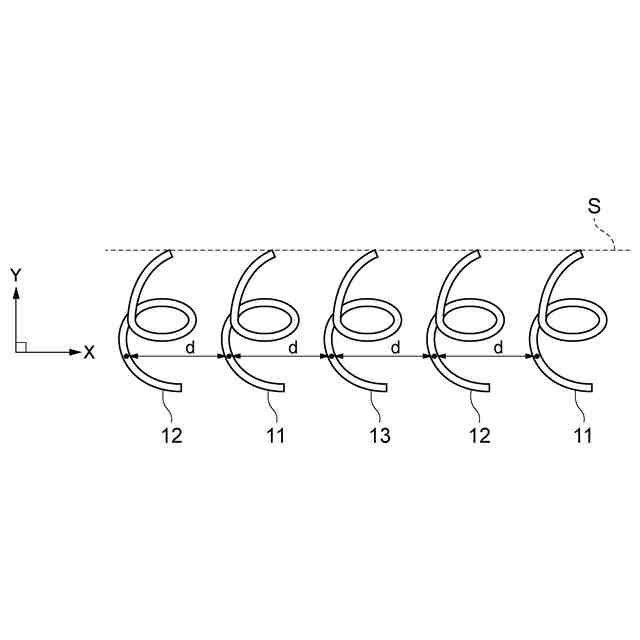
また、前記検出電極は、当該検出電極の部位の少なくとも一部が前記検出方向に対して垂直な方向に向かって湾曲又は屈曲するように形成されており、前記補正電極は、当該検出電極の部位の少なくとも一部が前記検出電極の湾曲方向又は屈曲方向と同じ方向に湾曲又は屈曲するように形成されている。
【0009】
また、前記検出電極及び前記補正電極に並列して前記検出方向に沿って延在するように設けられ、前記検出信号と同電位の信号が供給されるアクティブシールド電極をさらに備え、前記検出電極は、前記補正電極に対して前記検出方向に沿って右側に設けられ、前記アクティブシールド電極は、前記検出電極に対して前記検出方向に沿って右側に設けられる。
【0010】
また、前記検出電極及び前記補正電極は、前記検出方向における位置のうち少なくとも一部が隣接する電極同士で等間隔になるように複数設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
ロボット
22日前
株式会社不二越
X線測定システム
9日前
株式会社不二越
X線測定システム
8日前
株式会社不二越
ノンリーク三方弁
25日前
株式会社不二越
複合アクチュエータ
25日前
株式会社不二越
斜板式ピストンポンプ
16日前
株式会社不二越
固定構造および固定治具
今日
株式会社不二越
ロボットに用いる伝送路
7日前
株式会社不二越
X線回折測定装置及びプログラム
25日前
株式会社不二越
超硬合金およびこれを用いた切削工具
今日
株式会社不二越
センサシステム及びロボットシステム
7日前
株式会社不二越
冷間金型用合金鋼およびそれを用いた冷間金型
今日
個人
メジャー文具
17日前
個人
アクセサリー型テスター
10日前
個人
高精度同時多点測定装置
9日前
ユニパルス株式会社
ロードセル
16日前
株式会社ミツトヨ
測定器
今日
アズビル株式会社
電磁流量計
3日前
株式会社ヨコオ
ソケット
16日前
ダイキン工業株式会社
監視装置
14日前
株式会社チノー
放射光測温装置
16日前
トヨタ自動車株式会社
監視装置
15日前
株式会社ヨコオ
ソケット
15日前
TDK株式会社
ガスセンサ
16日前
TDK株式会社
ガスセンサ
21日前
長崎県
形状計測方法
10日前
TDK株式会社
磁気センサ
15日前
個人
システム、装置及び実験方法
3日前
ローム株式会社
半導体装置
8日前
ローム株式会社
半導体装置
8日前
愛知時計電機株式会社
ガスメータ
今日
日本特殊陶業株式会社
センサ
14日前
日本特殊陶業株式会社
センサ
14日前
株式会社デンソー
電流センサ
8日前
中国電力株式会社
電柱管理システム
14日前
日本特殊陶業株式会社
センサ
14日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ