TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025147802
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048230
出願日
2024-03-25
発明の名称
回転角度又は位置の検出装置
出願人
株式会社豊田中央研究所
,
株式会社デンソー
代理人
弁理士法人YKI国際特許事務所
主分類
G01D
5/244 20060101AFI20250930BHJP(測定;試験)
要約
【課題】回転角度又は位置の検出の高精度化とフィルタ出力信号の遅延低減を両立させることができる回転角度又は位置の検出装置を提供する。
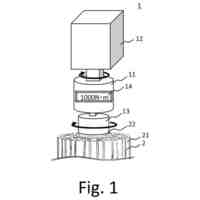
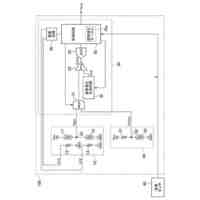
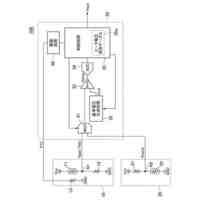
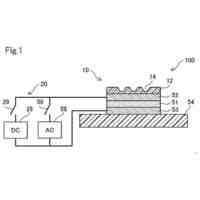
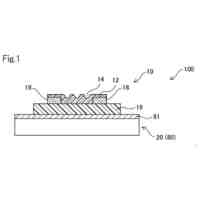
【解決手段】被害検出体5の回転又は往復運動に応じて正弦信号及び余弦信号の少なくとも一方をセンサ信号v2として出力するセンサ1,2と、ハイパスフィルタ33及びローパスフィルタ34を含み、センサ信号v2が入力されるバンドパスフィルタ3と、バンドパスフィルタ3でセンサ信号v2からノイズを除去したフィルタ出力信号v3が入力されることによって被検出体5の回転角度又は位置を検出するポジション検出回路4と、センサ信号v2が入力されることによって被検出体5の回転又は往復運動の周波数を検出する周波数検出回路31と、を備え、周波数検出回路31で検出した被検出体5の回転又は往復運動の周波数に応じてハイパスフィルタ33の時定数を調整する。
【選択図】図1
特許請求の範囲
【請求項1】
被検出体の回転又は往復運動に応じて正弦信号及び余弦信号の少なくとも一方をセンサ信号として出力するセンサと、
ローパスフィルタと時定数を変更可能なハイパスフィルタとを有し、前記センサ信号が入力されるバンドパスフィルタと、
前記バンドパスフィルタで前記センサ信号からノイズを除去したフィルタ出力信号が入力されることによって前記被検出体の回転角度又は位置を検出するポジション検出回路と、
前記センサ信号又は前記フィルタ出力信号が入力されることによって前記被検出体の回転又は往復運動の周波数を検出する周波数検出回路と、を備え、
前記周波数検出回路で検出した前記被検出体の回転又は往復運動の周波数に応じて前記ハイパスフィルタの時定数を調整することを特徴とする回転角度又は位置の検出装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の回転角度又は位置の検出装置であって、
前記ローパスフィルタは時定数を変更可能であって、
前記周波数検出回路で検出した前記被検出体の回転又は往復運動の周波数に応じて前記ローパスフィルタの時定数を調整することを特徴とする回転角度又は位置の検出装置。
【請求項3】
請求項1又は2に記載の回転角度又は位置の検出装置であって、
前記周波数検出回路で検出した前記被検出体の回転又は往復運動の周波数が第1の閾値以下に低下すると、前記ハイパスフィルタの機能を無効化することを特徴とする回転角度又は位置の検出装置。
【請求項4】
請求項3に記載の回転角度又は位置の検出装置であって、
前記ハイパスフィルタの機能を無効化した状態では、前記ローパスフィルタの時定数を所定値に固定することを特徴とする回転角度又は位置の検出装置。
【請求項5】
請求項3に記載の回転角度又は位置の検出装置であって、
前記周波数検出回路で検出した前記被検出体の回転又は往復運動の周波数が、前記第1の閾値以下の値から前記第1の閾値より大きい値となった場合でも、前記第1の閾値より大きい第2の閾値以上となるまで、前記ハイパスフィルタの機能を無効化した状態を継続することを特徴とする回転角度又は位置の検出装置。
【請求項6】
請求項1又は2に記載の回転角度又は位置の検出装置であって、
前記フィルタ出力信号の正弦信号及び余弦信号から算出した前記被検出体の回転角度又は位置を出力することを特徴とする回転角度又は位置の検出装置。
【請求項7】
請求項4に記載の回転角度又は位置の検出装置であって、
前記周波数検出回路で検出した前記被検出体の回転又は往復運動の周波数が、前記第1の閾値以下の値から前記第1の閾値より大きい値となった場合でも、前記第1の閾値より大きい第2の閾値以上となるまで、前記ハイパスフィルタの機能を無効化した状態を継続し、前記ローパスフィルタの時定数を前記所定値に固定し続けることを特徴とする回転角度又は位置の検出装置。
【請求項8】
請求項1又は2に記載の回転角度又は位置の検出装置であって、
前記周波数検出回路は、前記センサ信号の複数の周期、単数の周期、半周期又は4分の1周期に含まれる基準クロックのパルス数をカウントすることによって前記被検出体の回転又は往復運動の周波数を検出することを特徴とする回転角度又は位置の検出装置。
【請求項9】
請求項1又は2に記載の回転角度又は位置の検出装置であって、
前記センサが、インダクティブ方式又は磁電変換素子方式のセンサであることを特徴とする回転角度又は位置の検出装置。
【請求項10】
請求項9に記載の回転角度又は位置の検出装置であって、
前記センサが、電磁誘導型又は自己インダクタンス型のインダクティブ方式のセンサであることを特徴とする回転角度又は位置の検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被検出体の回転角度又は位置を検出する検出装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、回転体の回転に応じて回転角度センサからセンサ信号として出力される正弦信号及び余弦信号のノイズを除去するためにローパスフィルタ(以下、LPFと略称する)を用いる回転角度検出装置が開示されている。
【0003】
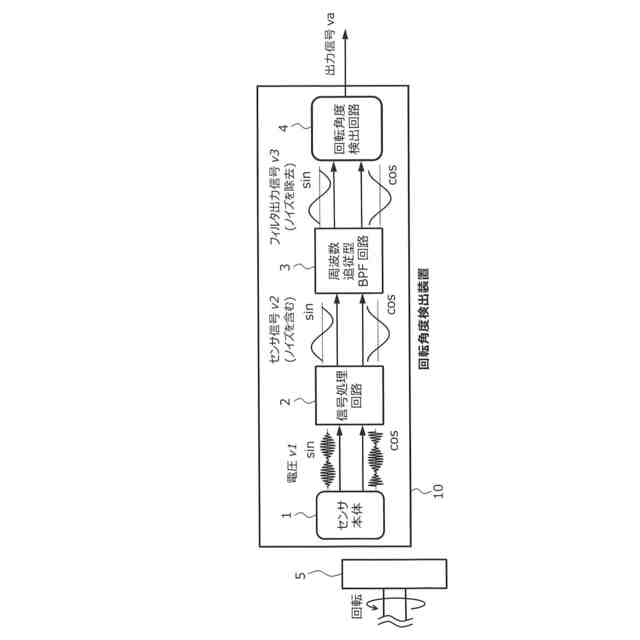
図23は、回転体の回転に応じて回転角度センサからセンサ信号として出力される正弦信号及び余弦信号のノイズを除去するためにLPFを用いる従来技術の回転角度検出装置の構成を示すブロック図である。この回転角度検出装置では、回転体の回転に応じて回転角度センサからセンサ信号として出力される正弦信号及び余弦信号からLPFによってノイズを除去して、フィルタ出力信号を回転角度検出回路に入力している。
【0004】
このような回転角度検出装置では、角度検出の精度を高めるためには、LPFの遮断周波数を、センサ信号が有する最大の周波数成分が通過可能でありながら、できるだけ低い値に設定する必要がある。
【0005】
例えば、図24に示すように、回転体の回転周波数を0~4kHzの範囲で使用するものとする。この場合、LPFの遮断周波数f
C2
は4kHzより高くなるように設定する必要がある。そこで、LPFの遮断周波数f
C2
を12kHzに設定した場合と48kHzに設定した場合を比較するため、遮断周波数f
C2
を12kHzに設定したLPFのゲインの周波数特性を図24に実線で示し、遮断周波数f
C2
を48kHzに設定したLPFのゲインの周波数特性を図24に破線で示す。すると、遮断周波数f
C2
を12kHzに設定したLPFより48kHzに設定したLPFの方が、通過帯域が広いため、フィルタ出力信号のノイズが大きくなる。つまり、遮断周波数f
C2
を48kHzに設定したLPFより12kHzに設定したLPFを用いた方が、S/N比(signal-noise ratio)が高くなり、回転体の回転角度を高い精度で検出することができる。そのため、目標とする角度検出精度や分解能によってLPFの時定数が決定される。
【先行技術文献】
【特許文献】
【0006】
特開2023-009590号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記従来技術では、LPFを用いることにより、フィルタ出力信号に位相の遅れが生じる。LPFのフィルタ出力信号の位相の遅れθ
2
は、後述する式9に示す関係式により、遮断周波数f
C2
が低いLPFの方が大きくなる。そのため、LPFでノイズを低減するほど遅延時間の増大を招き、目標の遅延時間を達成できない。
【0008】
このようにノイズ除去用にLPFを用いる回転角度検出装置では、LPFの遮断周波数f
C2
を低くするとノイズを低減できるがフィルタ出力信号の位相の遅れが大きくなり、LPFの遮断周波数f
C2
を高くするとフィルタ出力信号の位相の遅れを小さくできるがノイズが大きくなる。つまり、ノイズ除去用にLPFを用いる回転角度検出装置では、角度検出の高精度化とフィルタ出力信号の遅延低減はトレードオフの関係にある。
【0009】
また、被検出体の往復運動に応じて位置センサから正弦信号及び余弦信号がセンサ信号として出力される位置検出装置でも、センサ信号として出力される正弦信号及び余弦信号のノイズを除去するためにLPFを用いる場合は、同様に、位置検出の高精度化とフィルタ出力信号の遅延低減はトレードオフの関係にある。
【0010】
そこで、本発明は、上記のオレードオフを解決し、回転角度又は位置の検出の高精度化とフィルタ出力信号の遅延低減を両立させることができる回転角度又は位置の検出装置を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
14日前
個人
アクセサリー型テスター
7日前
個人
高精度同時多点測定装置
6日前
日本精機株式会社
位置検出装置
20日前
日本精機株式会社
位置検出装置
20日前
ユニパルス株式会社
ロードセル
13日前
日本精機株式会社
位置検出装置
20日前
アズビル株式会社
圧力センサ
19日前
株式会社ヨコオ
ソケット
13日前
株式会社ヨコオ
ソケット
12日前
ダイキン工業株式会社
監視装置
11日前
トヨタ自動車株式会社
監視装置
12日前
株式会社チノー
放射光測温装置
13日前
エイブリック株式会社
磁気センサ回路
19日前
株式会社ユーシン
操作検出装置
22日前
トヨタ自動車株式会社
検査装置
22日前
TDK株式会社
ガスセンサ
19日前
長崎県
形状計測方法
7日前
株式会社東芝
重量測定装置
18日前
ローム株式会社
半導体装置
5日前
東レエンジニアリング株式会社
計量装置
22日前
ローム株式会社
半導体装置
5日前
TDK株式会社
ガスセンサ
13日前
TDK株式会社
ガスセンサ
18日前
TDK株式会社
磁気センサ
12日前
TDK株式会社
電磁波センサ
13日前
日本特殊陶業株式会社
センサ
11日前
中国電力株式会社
電柱管理システム
11日前
三恵技研工業株式会社
融雪レドーム
12日前
富士電機株式会社
エンコーダ
19日前
株式会社デンソー
電流センサ
5日前
多摩川精機株式会社
冗長エンコーダ
12日前
日本特殊陶業株式会社
センサ
11日前
日本特殊陶業株式会社
センサ
11日前
三菱マテリアル株式会社
温度センサ
14日前
日本特殊陶業株式会社
センサ
11日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ