TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044082
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023151785
出願日
2023-09-19
発明の名称
光フアィバー距離計測器
出願人
個人
代理人
主分類
G01S
11/12 20060101AFI20250325BHJP(測定;試験)
要約
【課題】空間を飛行する光の時間と光フアイバー内を伝わる時間の違い。
光フアイバーの内の計測光の干渉。
【解決手段】光を使った距離計測の方法で、距離計測を受光する距離計測光の放光する位置を、光フアィバーを使って計測する位置に移して光フアイバーの先端から放光させる。
計測点で放光させた距離計測光を計測基点で受光、又は、計測基点で放光させた距離計測光を計測点で受光して、発光時間から受光時間の差を使って距離計測光の到達した距離を演算する。
到達時間から、光フアイバー内を通った時間を減ずることで、空間を飛行する光の時間を算出する。
又は、計測する光フアイバーの先端からの反射光、又は、放光した光の光フアイバーの先端から入射した光を計測して、光フアイバーの距離を減ずることで、距離計測する光の空間を飛行する距離を算出する。
【選択図】図14
特許請求の範囲
【請求項1】
光が放光されて空間を飛行した時間を計測して距離計測する方法であって、前記光を発光した位置で入射させた光フアィバーを通して、前記距離計測する位置で前記光フアィバーを通った前記光を前記空間に放光することを特徴とする方法。
続きを表示(約 1,400 文字)
【請求項2】
発光した前記光が前記空間に放光されて飛行した前記距離計測する位置で入射させた前記光フアィバーを通して、前記距離計測上の前記発光する位置で、前記空間を飛行した時間と前記光フアィバーを通った時間を計測することを特徴とする方法。
【請求項3】
前記光の発光する位置で入射した光フアィバー通して前記光フアィバーの先端で前記空間に放光して前記距離計測する被写体に照射し、前記距離計測する被写体からの前記光の前記空間を飛行する反射光を、前記距離計測上の前記発光した位置で前記光フアィバーを通った時間と前記空間を飛行した時間を計測することを特徴とする方法。
【請求項4】
請求項1から請求項3の何れかに記載にあって、前記被写体からの前記反射光を、距離の分かる異なる3か所以上の前記計測する受光器で受光して、前記3か所以上の受光器を使って前記被写体からの前記反射光の時間を計測することを特徴とする方法。
【請求項5】
請求項1から請求項3の何れかに記載にあって、前記距離計測用の前記光を異なる発光器の異なる時間に発光する前記光の入射した異なる光フアィバー通して、前記異なる光フアィバーの前記異なる先端で放光されて照射された異なる被写体からの前記異なる発光器の前記異なる時間に発光する、前記光の反射光を同じ前記受光器で受光して、前記異なる被写体との異なる時間を計測することを特徴とする方法。
【請求項6】
請求項1から請求項3の何れかに記載にあって、前記距離計測用の前記発光器の発光する前記光を、光学ミラー又は光学遮断フィルターを使って振り分けて入射した異なる光フアィバー通して、前記異なる光フアィバーの異なる先端で放光されて照射された異なる被写体からの前記振り分けた光の反射光を同じ前記受光器で受光して、前記異なる被写体との異なる時間を計測することを特徴とする方法。
【請求項7】
請求項1から請求項3の何れかに記載にあって、前記距離計測用の光の発光した時間と前記受光した時間の差を使って、前記照射した位置と前記受光した位置との時間を計測することを特徴とする方法。
【請求項8】
請求項1から請求項3の何れかに記載にあって、
前記距離計測用の発光する前記光を入射させた前記光フアィバーを通して、前記光フアィバーの末端の前記光を放光する位置を、
前記距離計測用の前記受光器に接置させて、前記光フアィバーを通して前記光の往復する時間、又は、前記光フアィバーの全長を
計測することを特徴とする方法。
【請求項9】
請求項1から請求項3の何れかに記載にあって、前記距離計測用の発光する前記光を入射させた光フアィバーを通して、前記光フアィバーの末端から放光する前記光を照射した被写体からの反射光を前記放光する位置又は近辺で前記反射光を受光して計測することを特徴とする方法。
【請求項10】
請求項1から請求項3の何れかに記載にあって、前記距離計測用の前記発光する前記光を入射させた前記光フアィバーを通して、前記光フアィバーの末端から前記放光した光の被写体からの反射光を、前記放光する位置の前記光フアィバーの前記末端から再度入射させた前記光フアィバー通して前記光を、前記発光した位置に設けられた受光器を使って計測することを特徴とする方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
距離計測器
続きを表示(約 2,800 文字)
【背景技術】
【0002】
光距離計測
【先行技術文献】
【特許文献】
【0003】
特許第5508308号
特許第5547605号
特許第5547670号
特許第6719494号
特許第7195093号
特願2022-148672
【非特許文献】
【0004】
特願2022-148668
【発明を実施するための形態】
【0005】
光ファイバーを使って、精度の高い光距離計測器を汎用化する。
【発明の概要】
【0006】
光ファイバーを使って距離計測の簡易化した、本発明の光距離計測の方法を使って計測精度を高めて、コンピューターの把握する3次元空間を構築する。
【発明が解決しようとする課題】
【0007】
追尾ロボット
歩行ロボット
デジテル地図の作成
インターネットで共有するデジタルマップの構築。
【発明の効果】
【0008】
コンピューターの把握するデジテル地図。
【図面の簡単な説明】
【0009】
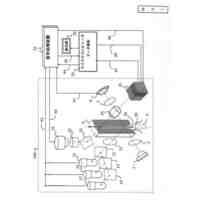
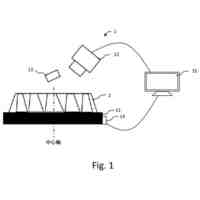
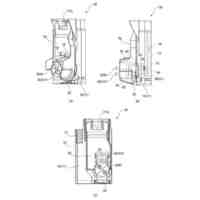
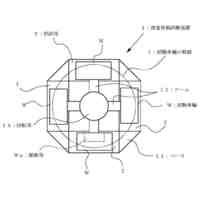
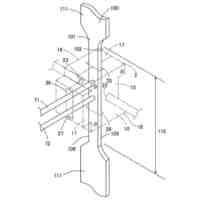
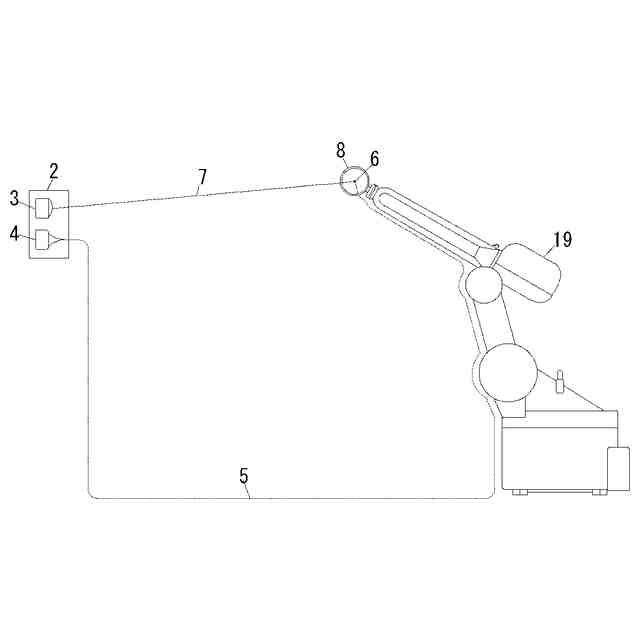
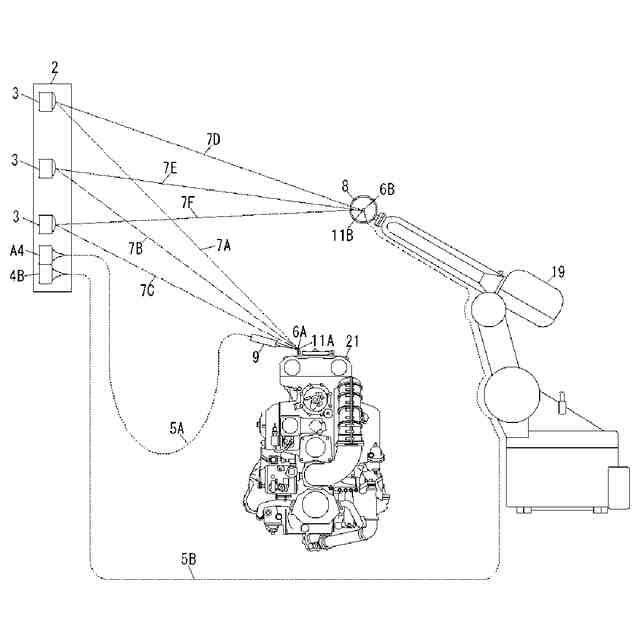
距離計測器2に組み込まれた距離計測発光器3の発光する距離計測光1が、ロボット30の駆動機構内に組み込まれた光ファイバー5の中を通って、ロボット19の作業位置8の位置の光ファイバー5の末端の放光位置6で空間に放光される。空間に放光され距離計測光1が空間の最近の計測距離7を飛行して、距離計測2に組み込まれた距離計測受光器4を使って受光する。距離計測光1の発光時間と受光時間の差を使って、計測距離7の距離を計測する説明図。
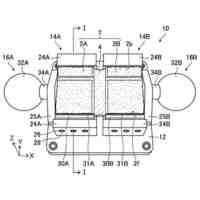
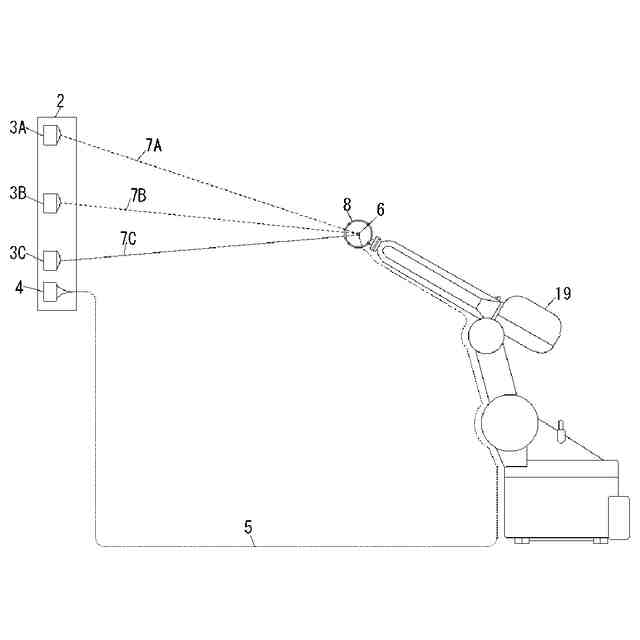
前記放光位置6で放光された距離計測光1が空間の最近の計測距離7A、B、Ⅽを飛行して、距離計測2に組み込まれた異なる位置の距離計測受光器3A、B、Ⅽを使って受光する。異なる位置の距離計測受光器3A、B、Ⅽが計測した計測距離7A、B、Ⅽを使ってロボット19の作業位置8の位置を演算して計測する説明図。
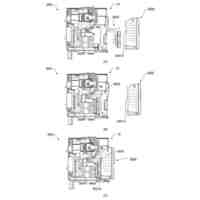
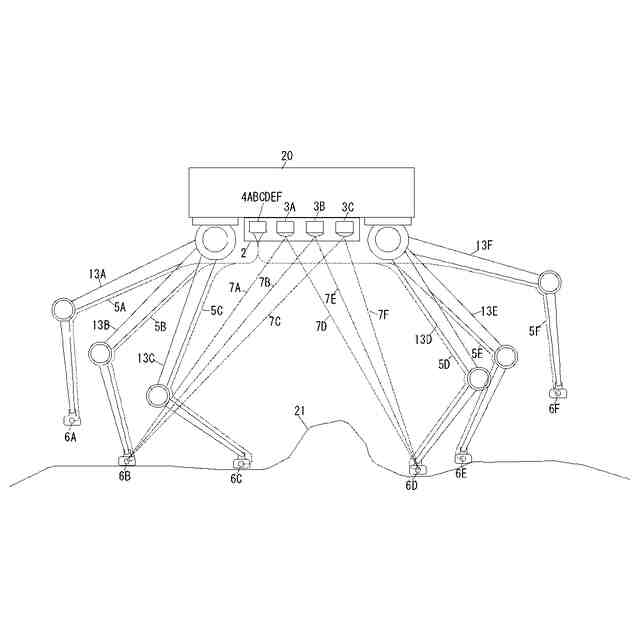
歩行足で歩行する歩足ロボット20の歩足13A、B、C、D、E、Fの位置に、距離計測発光器4ABⅭDEFからの光ファイバー5に繋がる放光位置6A、B、C、D、E、Fを設けて、周期をずらせて距離計測発光器4ABⅭDEFの発光する距離計測光1A、B、Ⅽ、D、E、Fを、歩足ロボット20の下部に設けた距離計測受光器3A、B、Ⅽを使って、前記周期をずらせて受光して、歩足13A、B、C、D、E、Fの位置を演算して計測する説明図
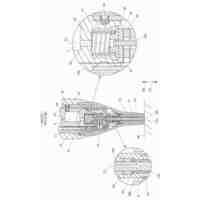
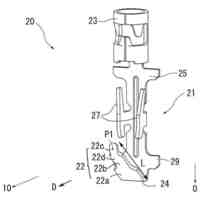
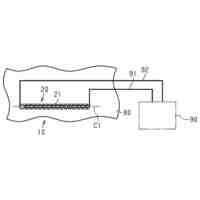
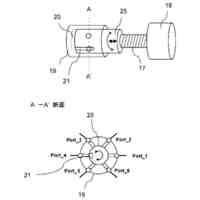
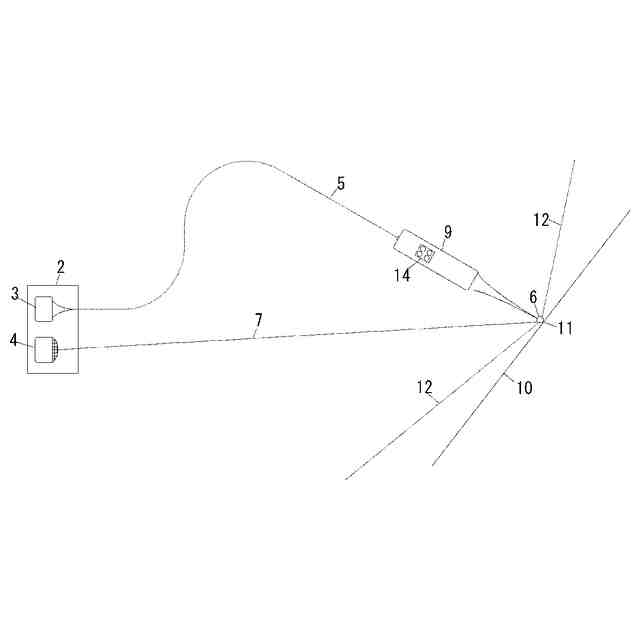
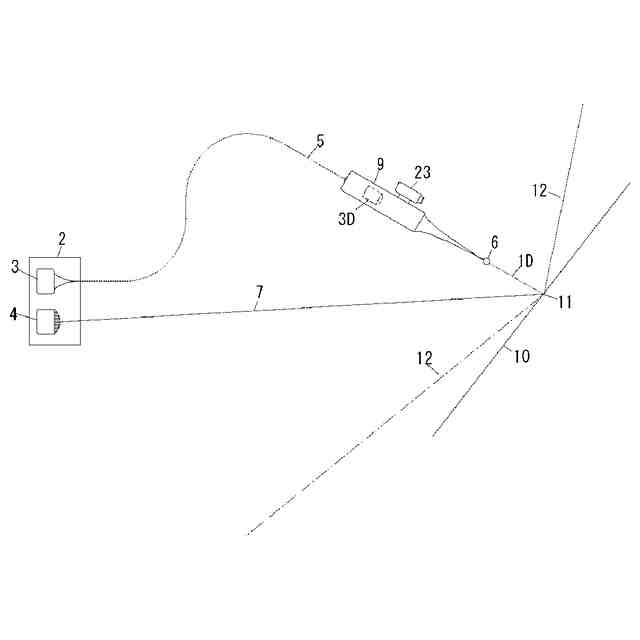
光ファイバー5の末端の放光位置6を、計測する位置を指定する指示具9を使って、距離計測物10の計測位置11から距離計測光1が空間に放光12される説明図。
計測位置11を計測する指示具9に組み込まれた距離計測受光器3Gを使って、指示具9と計測位置11との距離を計測して、テレビカメラ24を使って計測位置11を撮影する説明図。
光ファイバー5の指示具9を距離計測受光器3に接着して光ファイバー5の長さの距離計測光の通貨時間を計測して校正する説明図。
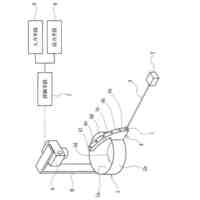
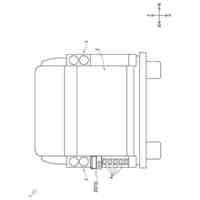
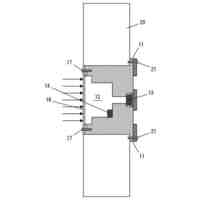
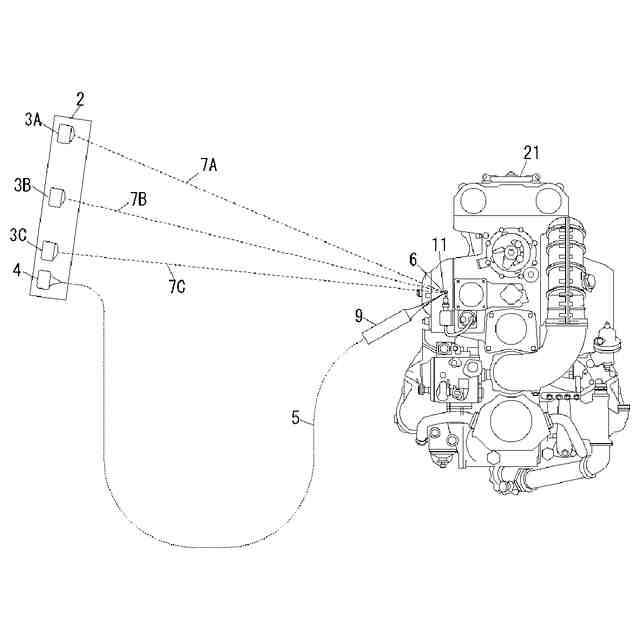
指示具9をエンジン21の計測位置11に接着して距離計測受光器3A、B、Ⅽまでの最近の計測距離7A、B、Ⅽを計測して距離計測器2との位置関係を計測する説明図。
前記エンジン21の計測位置11を指示しながら、ロボット19の作業位置8を指示した位置に駆動させて、ロボット19に指示した位置の作業をさせる説明図
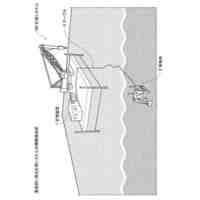
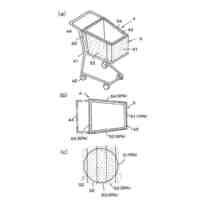
地表22の概知の位置15に指示具9を接着して概知の位置15と距離計測器2との位置関係を取得して、未知の位置16に指示具9を接着して未知の位置16と距離計測器2との位置関係を取得することで、概知の位置15から未知の位置16までの距離を演算する説明図。
地表22の概知の位置15に指示具9Aを接着して概知の位置15と距離計測器2との位置関係の維持をして、未知の位置16に指示具9Bを接着して未知の位置16と距離計測器2との位置関係を取得することで、概知の位置15から未知の位置16までの距離を演算する説明図。
走行路23の交差点付近の概知の位置15に指示具9を接着して、概知の位置15と距離計測器2との位置関係を取得する説明図。
前記概知の位置15と距離計測器2との位置関係を取得して、道路の交差点の右角17の位置に指示具9を接着して、道路の交差点の右角17と距離計測器2との位置関係を取得する。交差点の右角17を概知の位置15に関係付ける説明図。
前記概知の位置15と距離計測器2との位置関係を取得して、道路の交差点の左角18の位置に指示具9を接着して、道路の交差点の左角18と距離計測器2との位置関係を取得する。道路の交差点の左角18を概知の位置15に関係付ける。更に、交差点の右角17と道路の交差点の左角18を絶対方位値に関係付ける説明図。
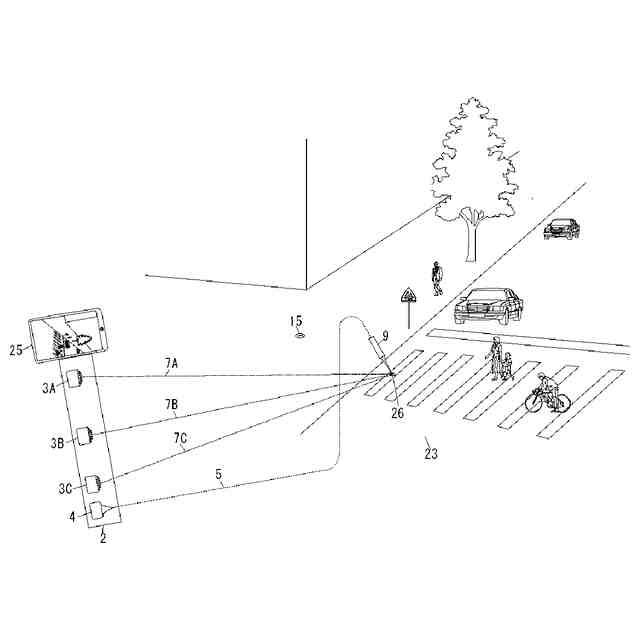
走行路23の交差点付近の概知の位置15に指示具9を接着して概知の位置15と距離計測器2との位置関係を取得する。走行路23の交差点の横断歩道26の位置に指示具9を接着して、横断歩道26と距離計測器2との位置関係を取得する。概知の位置15の絶対方位値を使って、横断歩道25を絶対方位値を演算して取得する。距離計測器2に取り付けたスマートフォン25を使って横断歩道26を撮影した画像を識別し、前記演算して取得した絶対方位値に、前記識別した画像を付して記憶する説明図。
【0010】
実施例 図1の
距離計測器2に組み込まれた距離計測発光器4の発光する距離計測光1を光ファイバー5に入射させて、ロボット19の駆動機構内に配置された光ファイバー5の中を通って、ロボット19の作業位置8の配置された光ファイバー5の末端の放光位置6で放光12させて空間に散光させる。
前記空間に放光12され距離計測光1が空間の最近の計測距離7を飛行して、距離計測器2に組み込まれた距離計測受光器3を使って受光する。
距離計測発光器4の発光した距離計測光1が、距離計測発光器4から入射する光ファイバー5の中を通って光ファイバー5の末端の位置で空間に放光されるまでの時間又は位相と、前記空間に放光された距離計測光1の最近の距離を通って距離計測受光器3に到達する時間又は距離計測光1の位相を計測する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
19日前
株式会社イシダ
計量装置
13日前
個人
アクセサリー型テスター
20日前
個人
準結晶の解析方法
5日前
日本精機株式会社
アセンブリ
5日前
株式会社豊田自動織機
自動走行体
4日前
株式会社ミツトヨ
画像測定機
21日前
株式会社テイエルブイ
振動検出装置
19日前
ダイハツ工業株式会社
試料セル
19日前
トヨタ自動車株式会社
検査装置
13日前
日本特殊陶業株式会社
ガスセンサ
5日前
トヨタ自動車株式会社
電気自動車
20日前
GEE株式会社
光学特性測定装置
4日前
理研計器株式会社
ガス検出器
21日前
理研計器株式会社
ガス検出器
21日前
理研計器株式会社
ガス検出器
21日前
株式会社熊谷組
計測システム
26日前
理研計器株式会社
ガス検出器
21日前
理研計器株式会社
ガス検出器
21日前
株式会社TISM
センサ部材
4日前
東ソー株式会社
簡易型液体クロマトグラフ
15日前
株式会社小糸製作所
物体検知システム
5日前
大和製衡株式会社
表示システム
11日前
リバークル株式会社
荷重移動試験装置
13日前
株式会社ニコン
検出装置
19日前
エスペック株式会社
温度槽及び試験方法
今日
大和ハウス工業株式会社
引張装置
12日前
株式会社イシダ
搬送装置
11日前
トヨタ自動車株式会社
情報処理装置
19日前
アンリツ株式会社
機器及びフィルタ
5日前
トヨタ自動車株式会社
情報処理装置
19日前
株式会社豊田自動織機
電流検出装置
19日前
株式会社 システムスクエア
X線検査装置
15日前
合同会社ステディステップス
側圧測定装置
19日前
トヨタ自動車株式会社
音源推定方法
11日前
Astemo株式会社
電子制御装置
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ