TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025064319
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023173963
出願日
2023-10-06
発明の名称
有線ドローンシステム
出願人
株式会社北川鉄工所
代理人
個人
,
個人
,
個人
主分類
B64U
10/60 20230101AFI20250410BHJP(航空機;飛行;宇宙工学)
要約
【課題】
ドローンの高度を規定値以下に確実に規制することができる有線ドローンシステムを提供する。
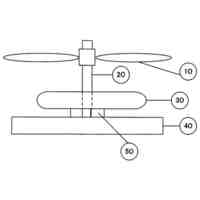
【解決手段】
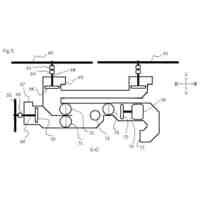
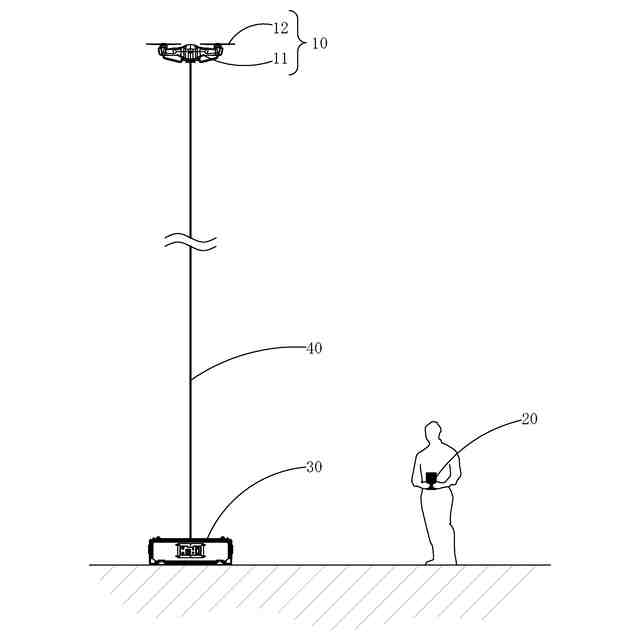
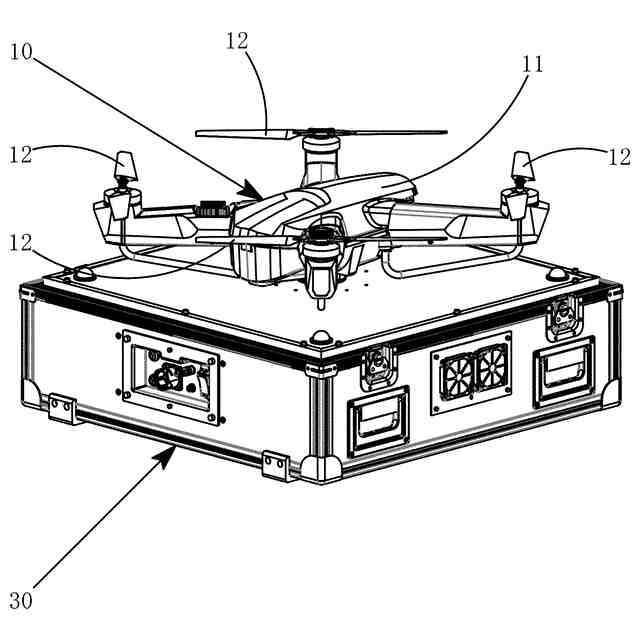
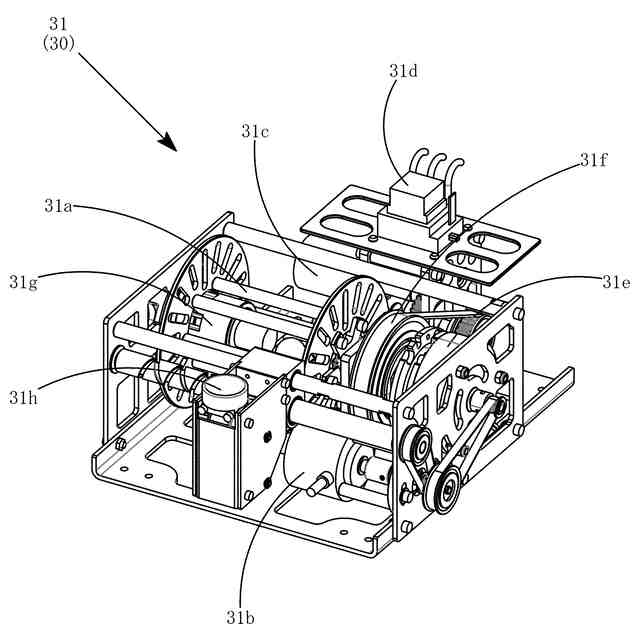
遠隔操作によって飛行するドローン10と、地上に設置される地上設置部30と、ドローン10と地上設置部30とを連結するケーブル40とを備え、地上設置部30に、ケーブル40を繰り出し又は巻き取るためのケーブル繰り出し手段31が設けられた有線ドローンシステムにおいて、ドローン10の推力を、ドローン10及びケーブル40の繰り出し部分に掛かる重力よりも大きく設定することによって、ケーブル40に張力を与えるとともに、ケーブル40の繰り出し長さが所定値L
1
に達すると、ケーブル繰り出し手段31を停止することによって、ドローン10が目的の高度よりも高くならないようにした。
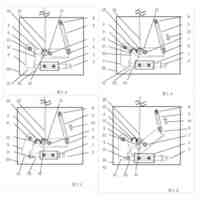
【選択図】 図4
特許請求の範囲
【請求項1】
遠隔操作によって飛行するドローンと、
地上に設置される地上設置部と、
ドローンと地上設置部とを連結するケーブルと
を備え、
地上設置部に、ケーブルを繰り出し又は巻き取るためのケーブル繰り出し手段が設けられた有線ドローンシステムであって、
ドローンの推力が、ドローン及びケーブルの繰り出し部分に掛かる重力よりも大きく設定されることによって、ケーブルに張力を与えるとともに、
ケーブルの繰り出し長さが所定値に達すると、ケーブル繰り出し手段が停止されることによって、ドローンが目的の高度よりも高くならないようにした
ことを特徴とする有線ドローンシステム。
続きを表示(約 160 文字)
【請求項2】
ケーブルの長さが所定値に達する直前に、ケーブル繰り出し手段からのケーブルの繰り出し速度又は巻き取り速度を低下させるブレーキ手段を備えた請求項1記載の有線ドローンシステム。
【請求項3】
ドローンが地上設置部の真上となるようにドローンの水平位置が制御される請求項2記載の有線ドローンシステム。
発明の詳細な説明
【技術分野】
【0001】
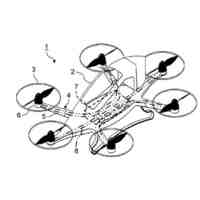
本発明は、遠隔操作によって飛行するドローンと、地上に設置される地上設置部とがケーブルを介して接続された有線ドローンシステムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
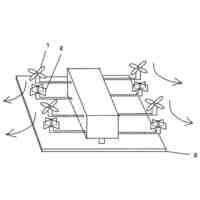
特許文献1の図3に示されるように、ドローン(同図における「飛行体30」)と、地上設置部(同図における「地上部10」)とを、ケーブル(同図における「ケーブル20」)で連結した有線ドローンシステムが既に公知となっている。同文献の有線ドローンシステムでは、地上設置部の付近に、ドローンに電力を供給する電源装置や、ケーブルを繰り出し又は巻き取るためのケーブル繰り出し手段(特許文献1の図3における「リール装置70」)が設けられている。この種の有線ドローンシステムでは、ドローンのプロペラを駆動する電力を、ケーブルを介して地上の電源装置から供給することができるので、ドローンの飛行継続時間を長くすることができる。
【先行技術文献】
【特許文献】
【0003】
特開2019-156242号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ドローンを飛ばす際には、原則、国土交通省等の関係機関の事前承認を得る必要がある。ただし、ドローンの高度が30m以下、十分な強度を有する紐でドローンを係留する、飛行区域への第三者の地入りを制限する等の所定の条件を満たせば、事前承認を得なくても、ドローンを飛ばすことができる場合がある。しかし、ドローンの高度は、全地球航法衛星システム(GNSS:Global Navigation Satellite System)や、気圧計等を用いて計測されるところ、ドローンの高度を30m以下に保とうとしても、それらが計測した高度に誤差が生じるおそれがある。例えば、GNSSでは、高さ方向に数メートル程度の誤差が生じることがある。このため、操縦者が30m以下の高度でドローンを飛ばしているつもりであっても、ドローンの実際の高度がその高度を超えてしまう可能性を否定することができない。
【0005】
この点、上記の特許文献1の有線ドローンシステムでは、ドローンと地上設置部とがケーブルで連結されているため、ドローンの高度が、ケーブルによって制限されるようにも思える。しかし、同文献の有線ドローンシステムで行っているのは、ケーブル繰り出し手段のトルクを状況に応じて変更することで、ドローンの移動に合わせてケーブルが速やかに繰り出される又は巻き取られるようにすることである。換言すると、同文献の有線ドローンシステムは、ドローンの移動に応じて、ケーブルの長さを受動的に調節するものとなっている。
【0006】
このため、上記の特許文献1の有線ドローンシステムでは、ケーブル繰り出し手段からケーブルを繰り出すことができなくなる限界に達するまでは、ドローンが地上設置部から遠ざかれば遠ざかるほど、ケーブル繰り出し手段からケーブルが繰り出されるようになっている。したがって、やはり、ドローンの高度が規定値よりも高くなるおそれがある。
【0007】
本発明は、上記課題を解決するためになされたものであり、ドローンの高度を規定値以下に確実に規制することができる有線ドローンシステムを提供するものである。
【課題を解決するための手段】
【0008】
上記課題は、
遠隔操作によって飛行するドローンと、
地上に設置される地上設置部と、
ドローンと地上設置部とを連結するケーブルと
を備え、
地上設置部に、ケーブルを繰り出し又は巻き取るためのケーブル繰り出し手段が設けられた有線ドローンシステムであって、
ドローンの推力が、ドローン及びケーブルの繰り出し部分に掛かる重力よりも大きく設定されることによって、ケーブルに張力を与えるとともに、
ケーブルの繰り出し長さが所定値に達すると、ケーブル繰り出し手段が停止されることによって、ドローンが目的の高度よりも高くならないようにした
ことを特徴とする有線ドローンシステム
を提供することによって解決される。
【0009】
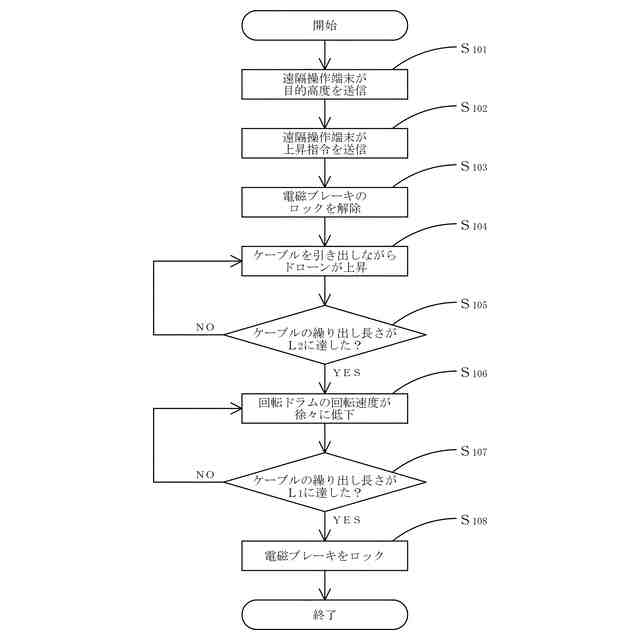
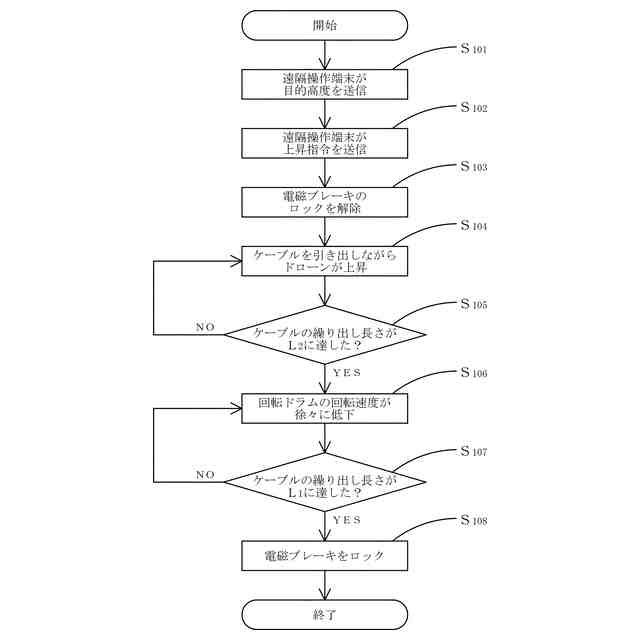
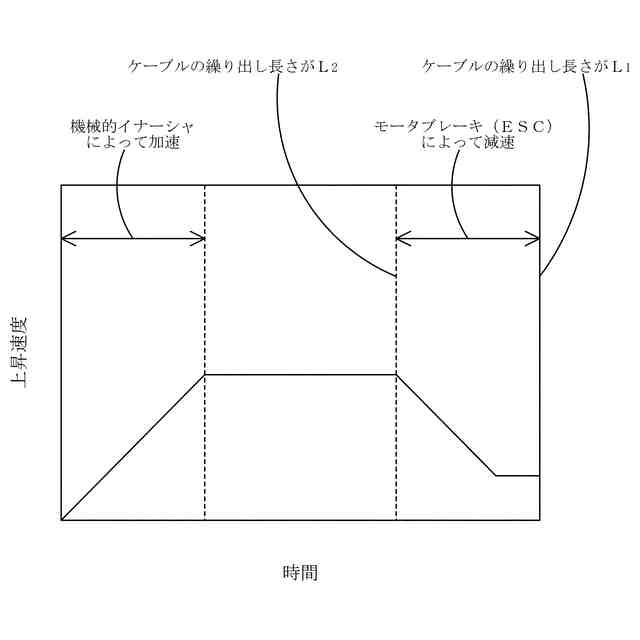
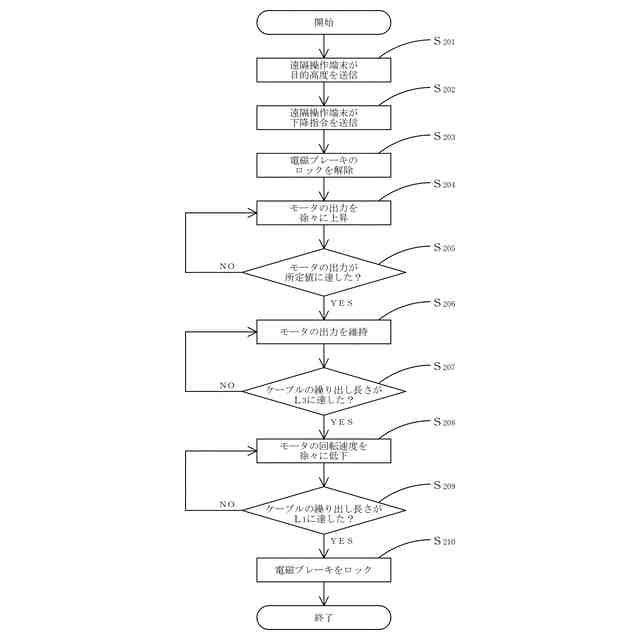
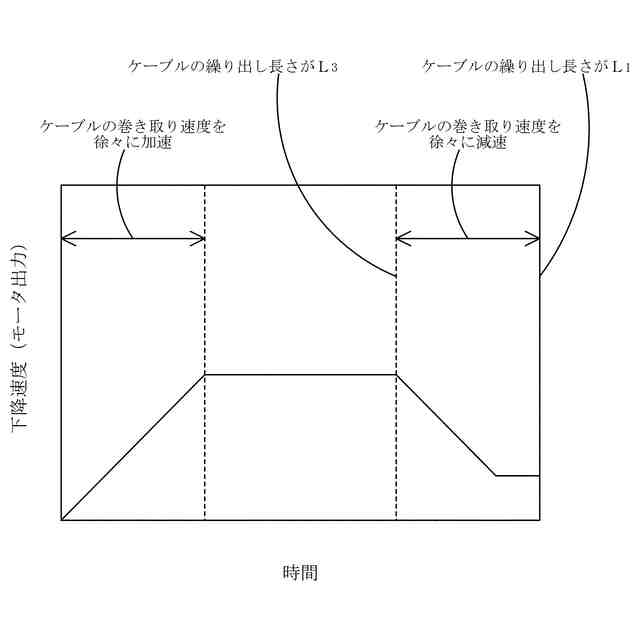
本発明の有線ドローンシステムでは、ドローンの飛行時(上昇時、下降時又はホバリング時等)においては、ドローンによってケーブルが常に上側に引っ張られるため、ケーブルに張力を与えた状態となる。ドローンの上昇時においては、上昇するドローンによってケーブルが上側に引っ張られることで、ケーブル繰り出し手段からケーブルが繰り出される。一方、ドローンの下降時においては、ドローン自体は上昇しようとするものの、ドローンの上昇推力よりも強い力でケーブル繰り出し手段がケーブルを下側に引っ張る(ケーブルを巻き取る)ことで、ドローンが下降する。ドローンの上昇時と下降時のいずれにおいても、ケーブルの繰り出し長さが所定値(目的の高度に対応した値)に達したときには、ケーブル繰り出し手段が停止(ケーブルの繰り出し又は巻き取りが停止)される。このため、その高度からドローンがさらに上昇しようとしても、ケーブルの繰り出し長さがそれ以上長くならない(ドローンが、ケーブルによって地上側に引っ張られる)ようになっている。したがって、ドローンが目的の高度(例えば、上述した規定値)を超えないように、ドローンの高度を確実に規制することができる。
【0010】
ただし、ドローンが勢いよく上昇していき、上昇速度が速い状態でドローンが目的の高度に達すると、ケーブルの繰り出しが停止された反動で、ドローンがケーブルで下側に強く引っ張られ、ドローンの姿勢が不安定になるおそれがある。また、ドローンが下降しているときにケーブルの巻き取りを停止した際にも、ドローンの姿勢が不安定になるおそれがある。このため、本発明の有線ドローンシステムにおいては、ケーブルの長さが所定値(目的の高度に対応した値)に達する直前に、ケーブル繰り出し手段からのケーブルの繰り出し速度又は巻き取り速度を低下させるブレーキ手段を設けることが好ましい。これにより、上記の反動を小さく抑えることが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大成建設株式会社
工事用設備および工事用設備の組立方法
14日前
個人
ドローン
2か月前
個人
ドローンシステム
3か月前
個人
連続回転可能な飛行機翼
今日
個人
陸海空用の乗り物
25日前
株式会社三圓
浮上装置
7か月前
個人
空港用貨物搬送車
11か月前
個人
垂直離着陸機用エンジン改
3か月前
個人
ドローンの計測操作方法2
8か月前
個人
ドローンの計測操作方法3
8か月前
個人
飛行艇
10か月前
キヤノン電子株式会社
磁気トルカ
8か月前
個人
ドローン消音装置
6か月前
個人
ドローンを自動離着陸する方法
3か月前
個人
空中移動システム
4か月前
個人
エアライナー全自動パラシュート
2か月前
トヨタ自動車株式会社
ドローン
1か月前
株式会社セネック
ドローンポート
11か月前
株式会社セネック
ドローンポート
11か月前
株式会社ACSL
システム
2か月前
株式会社ACSL
システム
2か月前
合同会社アドエア
パラシュート射出装置
2か月前
株式会社SUBARU
電動航空機
12か月前
合同会社アドエア
飛行体の落下補助装置
4か月前
株式会社中北製作所
羽ばたき装置
11か月前
株式会社小糸製作所
飛行体ポート
1日前
個人
垂直離着陸機用ガスタービンエンジン
3か月前
株式会社SUBARU
移動体
5か月前
全日本空輸株式会社
ドーリシステム
7か月前
株式会社SUBARU
回転翼航空機
12か月前
ミネベアミツミ株式会社
無人機
1か月前
ミネベアミツミ株式会社
無人機
1か月前
HDサービス合同会社
カメラ装着装置
6か月前
川崎重工業株式会社
水素航空機
今日
株式会社デンソー
推進装置
9か月前
本田技研工業株式会社
航空機
7か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ