TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025068223
公報種別
公開特許公報(A)
公開日
2025-04-28
出願番号
2023177981
出願日
2023-10-16
発明の名称
変位センサの校正方法
出願人
株式会社 エニイワイヤ
代理人
個人
主分類
G01C
3/06 20060101AFI20250421BHJP(測定;試験)
要約
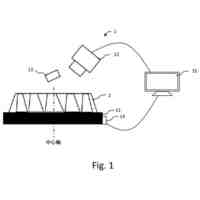
【課題】試験計測の点数が少ない校正作業でも、高い測定精度の実現を可能とし、かつ、複雑な演算処理を必要としない変位センサの校正方法を提供する。
【解決手段】検出対象物に対し光を照射する光源の光軸と、検出対象物からの反射光を検出素子の受光平面に結像する受光レンズの主平面を含む面と、受光平面を含む面と、の交点を基点とし、受光レンズの主点を原点とする二次元座標において、検出対象物の基点からの距離を、傾き角度が光源の光軸と主平面のなす角度となる第一の直線における位置で、基点から受光平面における結像位置までの距離を、傾き角度が主平面と受光平面のなす角度となる第二の直線における位置で表す数理モデルを使用し、結像位置と基点との距離の任意の設定値に基づいて得られるフィルタを介し試験計測により取得した検出対象物との距離の複数に基づき、検出対象物との距離および結像位置と基点との距離の相関式のパラメータを算出する。
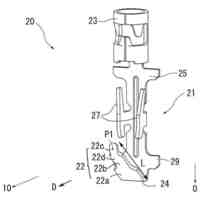
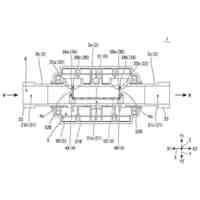
【選択図】図1
特許請求の範囲
【請求項1】
検出対象物に対し光を照射する光源の光軸と、前記検出対象物からの反射光を検出素子の受光平面に結像する受光レンズの主平面を含む面と、前記受光平面を含む面と、の交点を基点とし、前記検出対象物の前記基点からの距離を、前記受光レンズの主点を原点とする二次元座標において、傾き角度が前記光源の光軸と前記主平面のなす角度となる第一の直線における位置で表し、
前記基点から前記受光平面における結像位置までの距離を、前記二次元座標において、傾き角度が前記主平面と前記受光平面のなす角度となる第二の直線における位置で表す数理モデルを使用し、
前記検出対象物からの反射光の前記受光平面における前記受光レンズによる結像位置と前記基点との距離が任意の設定値となるときの前記検出対象物との距離を、前記検出対象物の移動を伴う試験計測により取得し、
前記試験計測を行った、前記結像位置と前記基点との距離の任意の設定値に基づいて得られるフィルタを介し、前記試験計測により取得した前記検出対象物との距離の複数に基づき、前記検出対象物との距離および前記結像位置と前記基点との距離の相関式のパラメータを算出することを特徴とする変位センサの校正方法。
続きを表示(約 140 文字)
【請求項2】
前記相関式が、前記検出対象物との距離により異なる請求項1に記載の変位センサの校正方法。
【請求項3】
前記相関式のパラメータが、浮動小数点を用いて算出された後、固定小数点を用いた表示に変換される請求項1又は2に記載の変位センサの校正方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測定対象物の距離/変位(以下、「変位」とする)を三角法により測定する変位センサを校正する方法に関する。
続きを表示(約 1,400 文字)
【0002】
検出対象物からの反射光に基づき検出対象物体の変位を算出する変位センサでは、検出対象物までの距離と反射光の相関が利用されているが、それらの相関を示すパラメータは、距離が既知となっている試験体を使用した校正作業を通して得られている。しかしながら、変位センサが内包する、検出対象物に照射する光源と、検出対象物からの反射光を得る検出部との幾何学的関係を、変位センサの全個体において同一とすることは難しく、個体差が生じている。そのため、校正作業では、変位センサの個体毎に、場合によっては一万点以上の試験計測を要している。
【0003】
そこで、特開2022-128878号公報(特許文献1)では、試験計測の点数が少ない校正作業でも、高い測定精度の実現を可能とする変位センサが提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-128878号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されている変位センサは、光源を含む投光部と検出対象物との間の距離を求めるにあたり、検出部における反射光の結像位置の変化と、投光部と検出対象物との間の距離と、の関係から得られる数理モデルを使用することにより、校正作業における試験計測点数の大幅な削減を可能とするものである。
【0006】
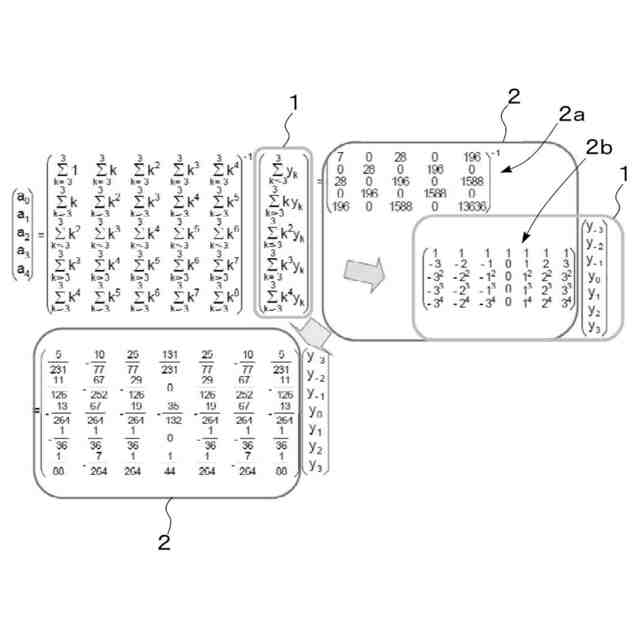
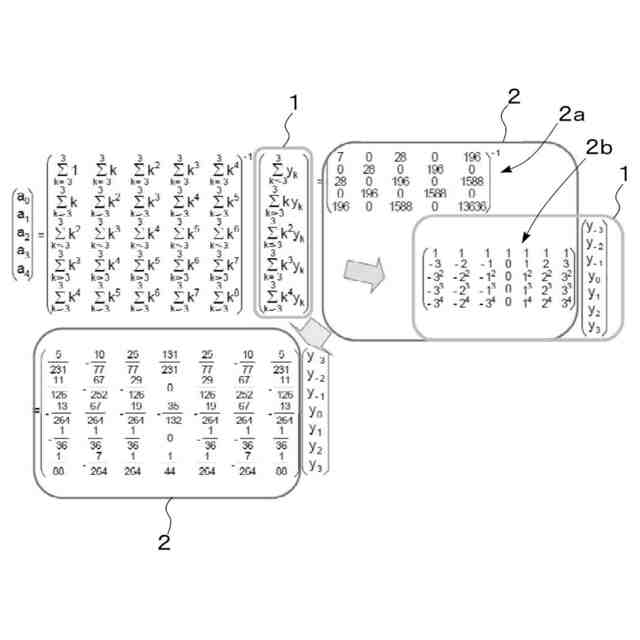
しかしながら、特許文献1に開示されている数理モデルでは、算出対象である検出対象物体との距離と、計測される結像位置の関係が非線形となっていた。そのため、試験計測点数を少なくできるものの、検出対象物までの距離と反射光の結像位置との相関を示すパラメータの算出には複雑な演算処理を要する問題があった。
【0007】
そこで、本発明は、点数が少ない試験計測でも、高い測定精度の実現を可能とし、かつ、複雑な演算処理を必要としない変位センサの校正方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
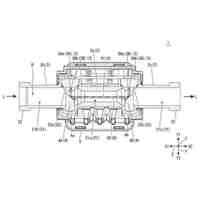
本発明に係る変位センサの校正方法では、検出対象物に対し光を照射する光源の光軸と、前記検出対象物からの反射光を検出素子の受光平面に結像する受光レンズの主平面を含む面と、前記受光平面を含む面と、の交点を基点とし、前記検出対象物の前記基点からの距離を、前記受光レンズの主点を原点とする二次元座標において、傾き角度が前記光源の光軸と前記主平面のなす角度となる第一の直線における位置で表し、前記基点から前記受光平面における結像位置までの距離を、前記二次元座標において、傾き角度が前記主平面と前記受光平面のなす角度となる第二の直線における位置で表す数理モデルを使用する。
【0009】
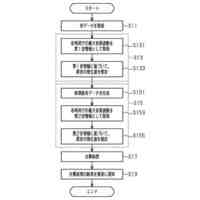
そして、前記検出対象物からの反射光の前記検出素子における前記受光レンズによる結像位置と前記基点との距離が任意の設定値となるときの前記検出対象物との距離を、前記検出対象物の移動を伴う試験計測により取得し、前記試験計測を行った、前記結像位置と前記基点との距離の任意の設定値に基づいて得られるフィルタを介し、前記試験計測により取得した前記検出対象物との距離の複数に基づき、前記検出対象物との距離および前記結像位置と前記基点との距離の相関式のパラメータを算出する。
【0010】
前記相関式が、前記検出対象物との距離により異なるものであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
16日前
株式会社イシダ
計量装置
10日前
日本精機株式会社
アセンブリ
2日前
個人
アクセサリー型テスター
17日前
個人
準結晶の解析方法
2日前
株式会社豊田自動織機
自動走行体
1日前
栄進化学株式会社
浸透探傷用濃縮液
23日前
株式会社テイエルブイ
振動検出装置
16日前
株式会社ミツトヨ
画像測定機
18日前
ダイハツ工業株式会社
試料セル
16日前
トヨタ自動車株式会社
検査装置
10日前
GEE株式会社
光学特性測定装置
1日前
大和製衡株式会社
計量装置
23日前
日本特殊陶業株式会社
ガスセンサ
2日前
トヨタ自動車株式会社
電気自動車
17日前
理研計器株式会社
ガス検出器
18日前
理研計器株式会社
ガス検出器
18日前
理研計器株式会社
ガス検出器
18日前
大成建設株式会社
画像表示システム
26日前
理研計器株式会社
ガス検出器
18日前
理研計器株式会社
ガス検出器
18日前
株式会社熊谷組
計測システム
23日前
株式会社TISM
センサ部材
1日前
東ソー株式会社
簡易型液体クロマトグラフ
12日前
株式会社 システムスクエア
検査装置
24日前
株式会社ニコン
検出装置
16日前
株式会社小糸製作所
物体検知システム
2日前
リバークル株式会社
荷重移動試験装置
10日前
大和製衡株式会社
表示システム
8日前
東洋計器株式会社
超音波式流量計
23日前
大和ハウス工業株式会社
引張装置
9日前
東洋計器株式会社
超音波式流量計
23日前
東洋計器株式会社
超音波式流量計
23日前
株式会社デンソー
試験装置
26日前
トヨタ自動車株式会社
音源推定方法
8日前
株式会社 システムスクエア
X線検査装置
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ