TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043036
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150323
出願日
2023-09-15
発明の名称
作業機
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
B25F
5/02 20060101AFI20250321BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】凹部が角部に形成されていない基板ケースがケース取付部に誤った姿勢で取り付けられることを抑制する。
【解決手段】作業機は、基板ケースと、基板ケースを第1方向にスライドさせるときに基板ケースが取り付けられるケース取付部と、を備えている。基板ケースは、ケース取付部に取り付けられている状態で第1方向に見るときに、第1方向に対して直交する第2方向に延びる長辺を有する長方形状を有しているとともに、第1角部と、第1角部と第2方向に隣り合う第2角部と、を備えている。ケース取付部は、基板ケースがケース取付部に取り付けられているときに、第1角部に対向する第1対応角部と、第2角部に対向する第2対応角部と、を備えている。第1角部と第2角部の少なくとも一方は、面取りされ、または丸められている。第1角部の形状は、第2角部の形状と異なる。
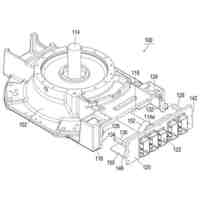
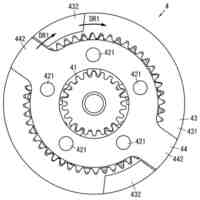
【選択図】図4
特許請求の範囲
【請求項1】
モータと、
前記モータにより動作する作業部と、
前記モータを制御する制御基板と、
前記制御基板を内部で保持する基板ケースと、
前記基板ケースを第1方向にスライドさせるときに前記基板ケースが取り付けられるケース取付部と、を備えており、
前記基板ケースは、前記ケース取付部に取り付けられている状態で前記第1方向に見るときに、前記第1方向に対して直交する第2方向に延びる長辺を有する長方形状を有しているとともに、第1角部と、前記第1角部と前記第2方向に隣り合う第2角部と、を備えており、
前記ケース取付部は、前記基板ケースが前記ケース取付部に取り付けられているときに、前記第1角部に対向する第1対応角部と、前記第2角部に対向する第2対応角部と、を備えており、
前記第1対応角部は、前記第1角部に対応する形状を有しており、
前記第2対応角部は、前記第2角部に対応する形状を有しており、
前記第1角部と前記第2角部の少なくとも一方は、面取りされ、または丸められており、
前記第1角部の形状は、前記第2角部の形状と異なる、作業機。
続きを表示(約 600 文字)
【請求項2】
前記基板ケースは、前記第2角部と前記第1方向と前記第2方向に対して直交する第3方向に隣り合う第3角部と、前記第1角部と前記第3方向に隣り合う第4角部と、をさらに備えており、
前記ケース取付部は、前記基板ケースが前記ケース取付部に取り付けられているときに、前記第3角部に対向する第3対応角部と、前記第4角部に対向する第4対応角部と、をさらに備えており、
前記第3対応角部は、前記第3角部に対応する形状を有しており、
前記第4対応角部は、前記第4角部に対応する形状を有しており、
前記第3角部の形状が前記第2角部の形状と異なる、および/または前記第4角部の形状が前記第1角部の形状と異なる、請求項1に記載の作業機。
【請求項3】
前記第1角部の形状が前記第3角部の形状と異なる、および/または前記第2角部の形状が前記第4角部の形状と異なる、請求項2に記載の作業機。
【請求項4】
前記ケース取付部の幅は、前記第1方向に向かうにつれて減少する、請求項1から3のいずれか一項に記載の作業機。
【請求項5】
前記基板ケースは、前記制御基板が着座される着座部を備えており、
前記着座部は、前記第1方向における前記基板ケースの一部の領域に配置されている、請求項1から4のいずれか一項に記載の作業機。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、作業機に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特許文献1には、作業機が開示されている。作業機は、モータと、モータにより動作する作業部と、モータを制御する制御基板と、制御基板を内部で保持する基板ケースと、基板ケースを第1方向にスライドさせるときに基板ケースが取り付けられるケース取付部と、を備えている。
【先行技術文献】
【特許文献】
【0003】
特開2022-137542号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の作業機では、基板ケースが、ケース取付部に誤った姿勢で取り付けられることがある。ケース取付部への基板ケースの誤取付を抑制するために、例えば、凹部が基板ケースの角部に形成されることがある。しかしながら、この構成では、凹部が基板ケースの角部に形成されていない構成と比較して、制御基板と基板ケースとの接触面積が大きくなる。これにより、制御基板に部品を実装することができる実装面積が少なくなる。本明細書では、凹部が角部に形成されていない基板ケースがケース取付部に誤った姿勢で取り付けられることを抑制することができる技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
本明細書は、作業機を開示する。作業機は、モータと、モータにより動作する作業部と、モータを制御する制御基板と、制御基板を内部で保持する基板ケースと、基板ケースを第1方向にスライドさせるときに基板ケースが取り付けられるケース取付部と、を備えている。基板ケースは、ケース取付部に取り付けられている状態で第1方向に見るときに、第1方向に対して直交する第2方向に延びる長辺を有する長方形状を有しているとともに、第1角部と、第1角部と第2方向に隣り合う第2角部と、を備えている。ケース取付部は、基板ケースがケース取付部に取り付けられているときに、第1角部に対向する第1対応角部と、第2角部に対向する第2対応角部と、を備えている。第1対応角部は、第1角部に対応する形状を有している。第2対応角部は、第2角部に対応する形状を有している。第1角部と第2角部の少なくとも一方は、面取りされ、または丸められている。第1角部の形状は、第2角部の形状と異なる。
【0006】
本明細書では、形状が異なるとは、角部処理が行われていることと角部処理が行われていないこと、および/または角部処理の種類が異なること、および/または同一種類の角部処理において寸法が異なることをいう。上記の構成によれば、第1角部が第1対応角部に対向し、第2角部が第2対応角部に対向している状態で、基板ケースがケース取付部に取り付けられる。一方、第1角部が第2対応角部に対向し、第2角部が第1対応角部に対向している状態では、第1角部が第2対応角部に干渉し、または第2角部が第1対応角部に干渉する。これにより、基板ケースをケース取付部に取り付けることができない。よって、基板ケースが誤った姿勢でケース取付部に取り付けられることを抑制することができる。
【図面の簡単な説明】
【0007】
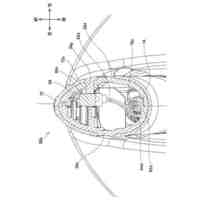
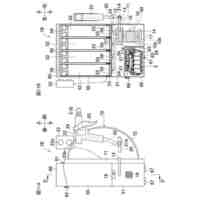
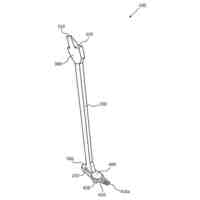
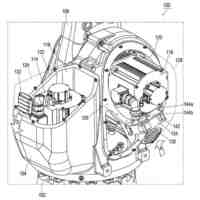
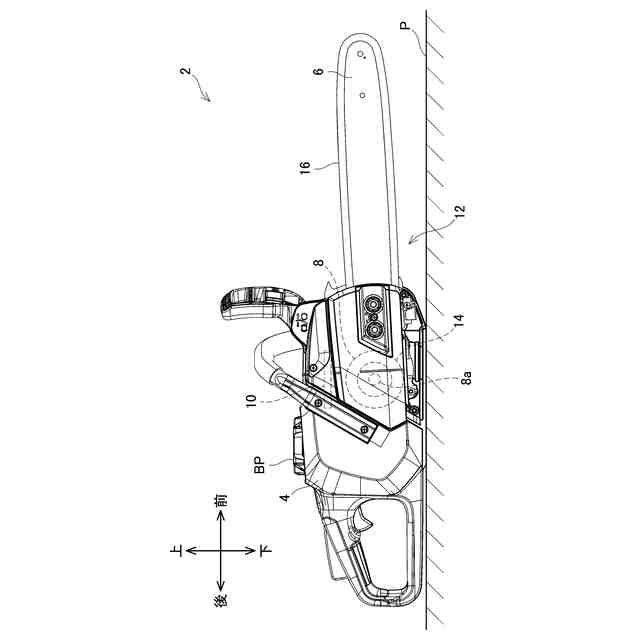
実施例の作業機2の側面図である。
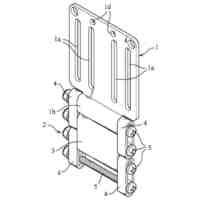
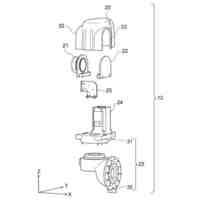
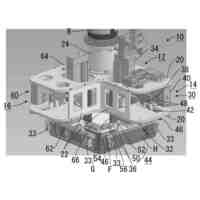
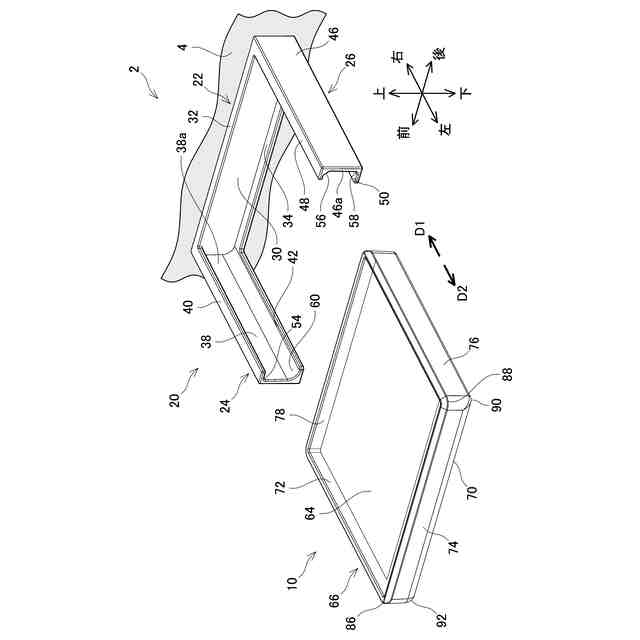
実施例の制御ユニット10とケース取付部20の分解斜視図である。
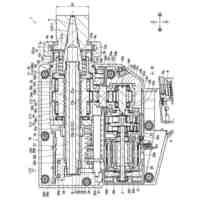
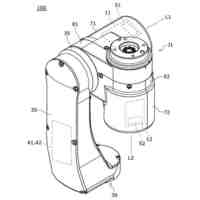
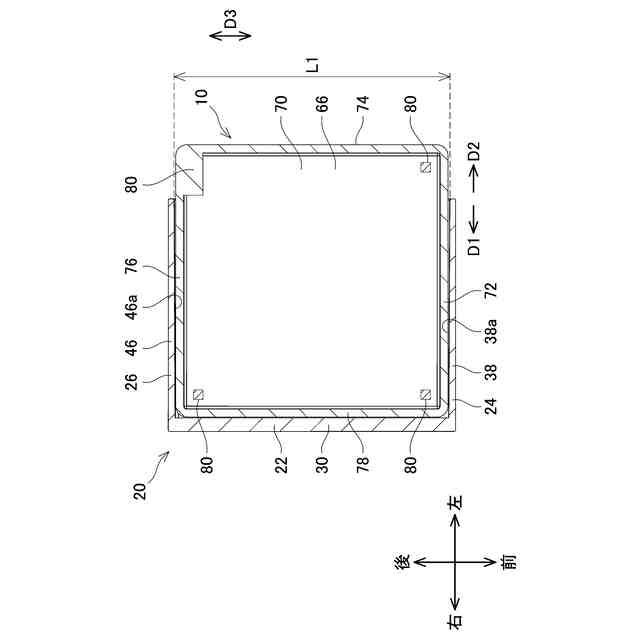
実施例の制御ユニット10とケース取付部20の上断面図である。
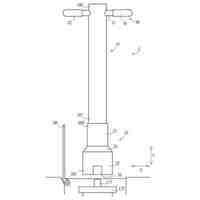
実施例の制御ユニット10とケース取付部20において、制御ユニット10がケース取付部20に正しい姿勢で取り付けられているときの側面図である。
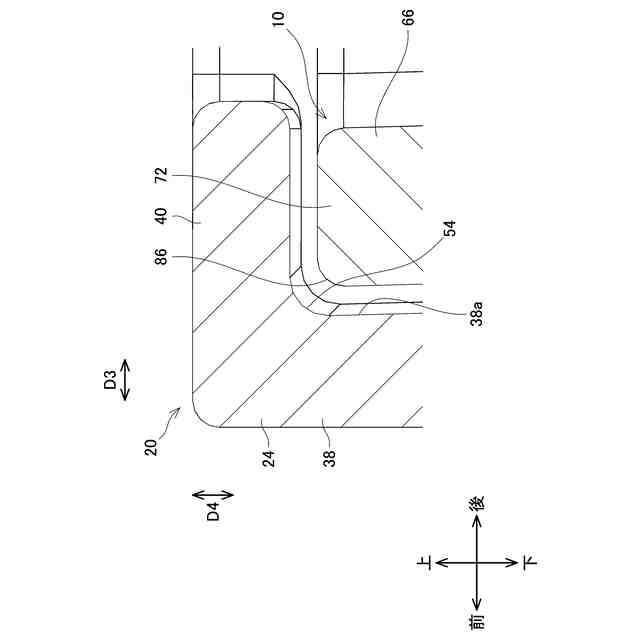
実施例の制御ユニット10とケース取付部20において、第1対応角部54と第1角部86での断面図である。
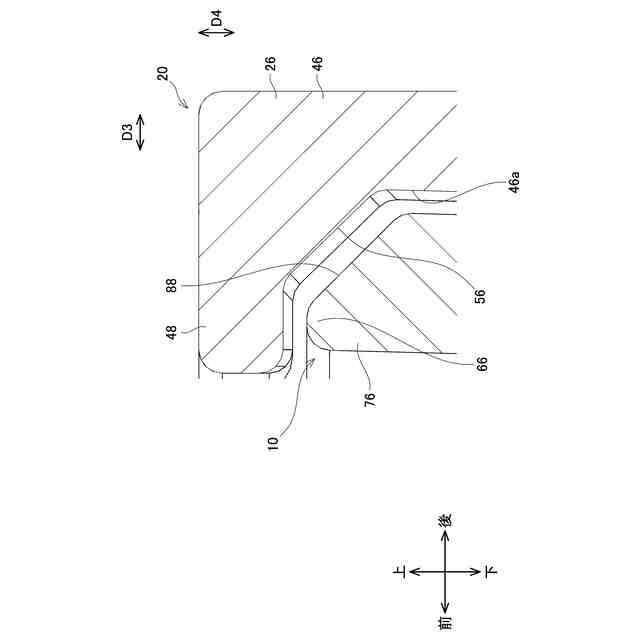
実施例の制御ユニット10とケース取付部20において、第2対応角部56と第2角部88での断面図である。
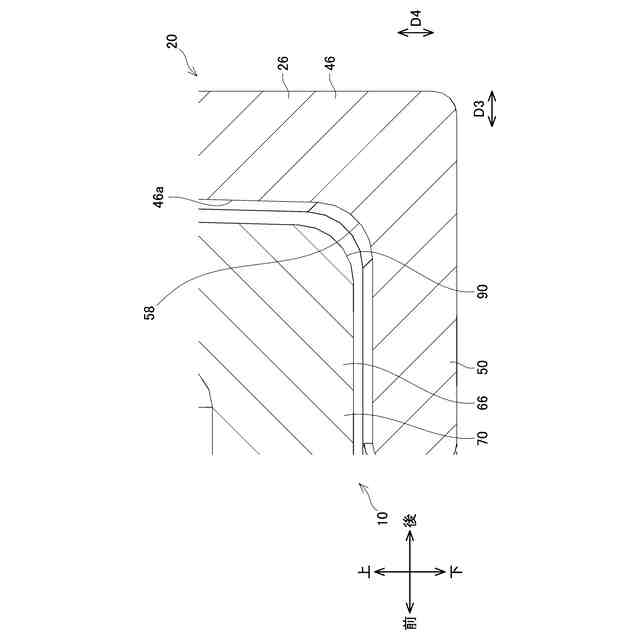
実施例の制御ユニット10とケース取付部20において、第3対応角部58と第3角部90での断面図である。
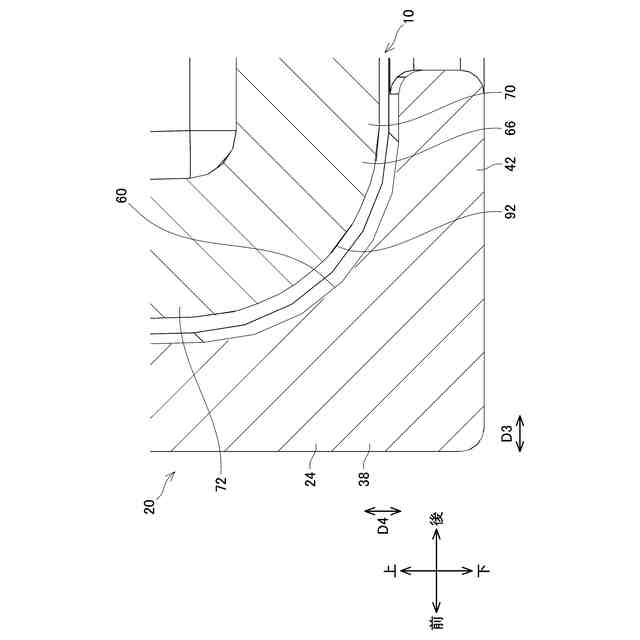
実施例の制御ユニット10とケース取付部20において、第4対応角部60と第4角部92での断面図である。
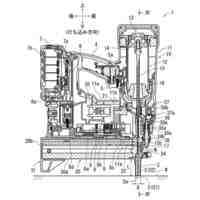
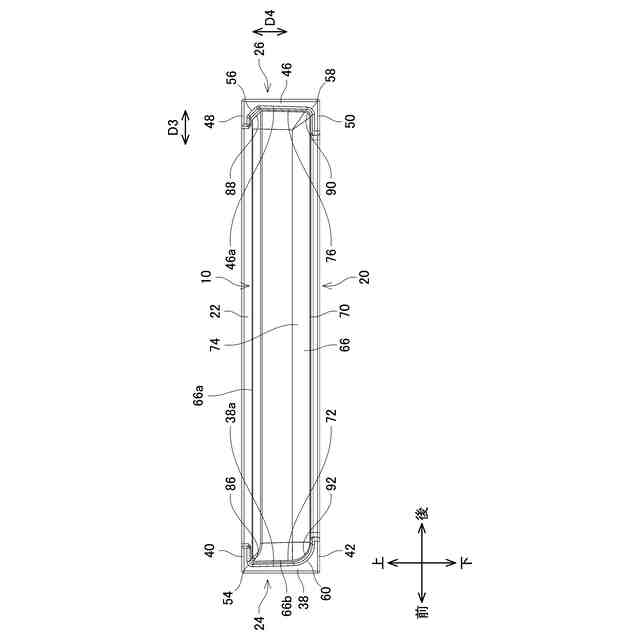
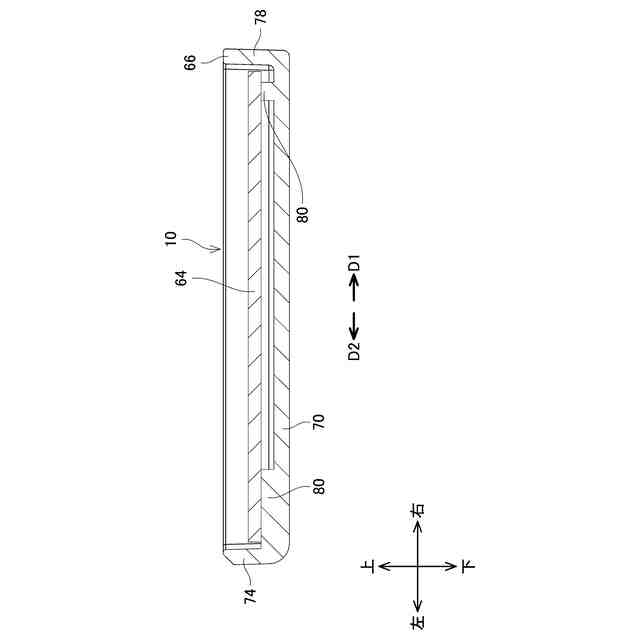
実施例の制御ユニット10の後断面図である。
実施例の制御ユニット10とケース取付部20において、制御ユニット10がケース取付部20に誤った姿勢で取り付けられるときの側面図である。
実施例の制御ユニット10とケース取付部20において、制御ユニット10がケース取付部20に誤った姿勢で取り付けられるときの側面図である。
【発明を実施するための形態】
【0008】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された作業機、その製造方法及び使用方法を提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、以下の代表的な具体例の様々な特徴、ならびに、特許請求の範囲に記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又は特許請求の範囲に記載された特徴の構成とは別に、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
16日前
株式会社マキタ
作業機
16日前
株式会社マキタ
管拡径工具
9日前
株式会社マキタ
打ち込み工具
9日前
株式会社マキタ
作業ロボット
17日前
株式会社マキタ
作業ロボット
17日前
株式会社マキタ
グリース吐出装置
8日前
株式会社マキタ
自律移動システム
17日前
株式会社マキタ
グリース吐出装置及びグリース注油システム
8日前
OMC株式会社
ロボット
22日前
株式会社クレスコ
補助吸着具
15日前
株式会社不二越
ロボット
7日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
22日前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
1か月前
住友重機械工業株式会社
ロボット
1日前
株式会社イノウ
給油口キャップ用開閉具
8日前
川崎重工業株式会社
制動システム
7日前
株式会社不二越
垂直多関節ロボット
8日前
アイホン株式会社
ネジ締めカウントシステム
9日前
芝浦機械株式会社
双腕ロボット
今日
株式会社デンソーウェーブ
ロボット制御システム
28日前
パナソニック株式会社
工具
8日前
パナソニック株式会社
工具
8日前
住友重機械工業株式会社
ロボット及びカバー
1日前
アピュアン株式会社
エアー式衝撃工具
25日前
学校法人法政大学
装着型アシスト装置
1か月前
三菱電機株式会社
トルク締め個所検出システム
1か月前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
1日前
住友重機械工業株式会社
アクチュエータ支持部材
今日
株式会社マキタ
打ち込み工具
9日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
23日前
株式会社マキタ
インパクト工具
23日前
SB C&S株式会社
治具セット
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ