TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025070470
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180800
出願日
2023-10-20
発明の名称
ハイブリッド車
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
B60W
20/12 20160101AFI20250424BHJP(車両一般)
要約
【課題】渋滞走行制御や下り坂走行制御などの蓄電割合調整制御とモータ走行領域走行制御との調整をより適正に行なう。
【解決手段】ハイブリッド車の制御装置は、計画または推定された走行経路にモータ走行すべき領域として設定されたモータ走行領域があるときには、前記モータ走行領域をモータ走行することが可能となるように前記モータ走行領域の開始地点から第1所定距離だけ前の地点から前記蓄電装置の蓄電割合を高くするモータ走行領域走行制御を前記蓄電割合調整制御に優先して行なう。
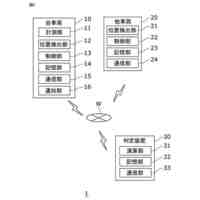
【選択図】図2
特許請求の範囲
【請求項1】
走行用の動力を出力可能なエンジンと、
走行用の動力を出力可能なモータと、
前記モータと電力のやりとりが可能な蓄電装置と、
前記エンジンの運転を停止した状態で前記モータからの動力により走行するモータ走行を行なうモータ走行モードと、必要に応じて前記エンジンからの動力と前記モータからの動力とにより走行する通常走行を行なう通常走行モードとを切り替えて前記エンジンおよび前記モータを制御すると共に、地図情報と自車位置とに基づく計画または推定された走行経路の情報に基づいて前記蓄電装置の蓄電割合を調整する蓄電割合調整制御を実行する制御装置と、
を備えるハイブリッド車であって、
前記制御装置は、計画または推定された走行経路にモータ走行すべき領域として設定されたモータ走行領域があるときには、前記モータ走行領域をモータ走行することが可能となるように前記モータ走行領域の開始地点から第1所定距離だけ前の地点から前記蓄電装置の蓄電割合を高くするモータ走行領域走行制御を前記蓄電割合調整制御に優先して行なう、
ことを特徴とするハイブリッド車。
続きを表示(約 670 文字)
【請求項2】
請求項1記載のハイブリッド車であって、
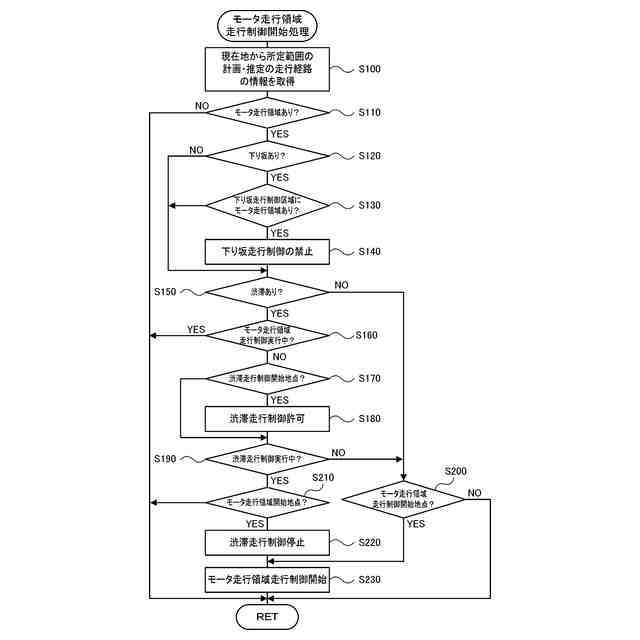
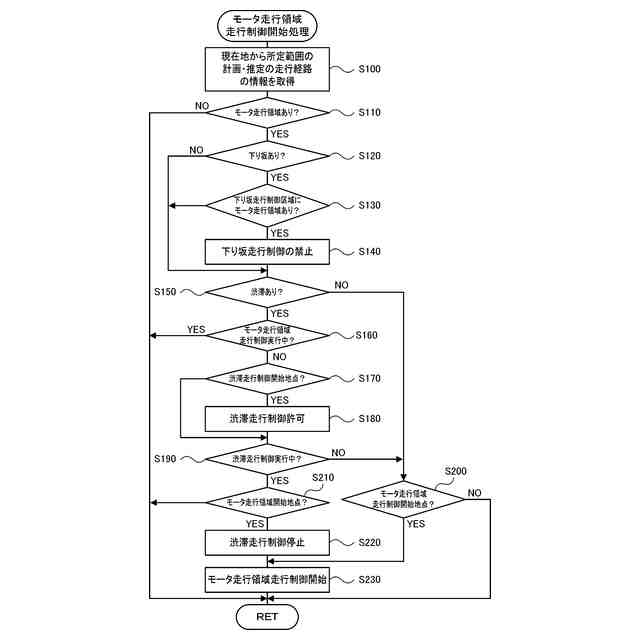
前記蓄電割合調整制御は、計画または推定された走行経路に渋滞が生じているときに渋滞の開始地点より第2所定距離だけ前の地点から渋滞の終了地点まで前記蓄電装置の蓄電割合を高く維持する渋滞走行制御を含み、
前記制御装置は、
前記渋滞走行制御を開始する地点で前記モータ走行領域走行制御を実行していないときには前記渋滞走行制御の実行を開始し、
前記渋滞走行制御を開始する地点で前記モータ走行領域走行制御を実行しているときには前記渋滞走行制御を実行せずに前記モータ走行領域走行制御を継続し、
前記渋滞走行制御を実行している最中に前記モータ走行領域走行制御を開始する地点に至ったときには前記モータ走行領域に至るまで前記渋滞走行制御を継続し、前記モータ走行領域に至ったときに前記渋滞走行制御を停止して前記モータ走行領域走行制御を実行する、
ハイブリッド車。
【請求項3】
請求項1記載のハイブリッド車であって、
前記蓄電割合調整制御は、計画または推定された走行経路に下り坂が存在しているときに前記下り坂の開始地点より第3所定距離だけ前の地点から前記下り坂の開始地点まで前記蓄電装置の蓄電割合が低くなるように制御する下り坂走行制御を含み、
前記制御装置は、前記下り坂走行制御の開始地点から前記下り坂の終了地点までの間に前記モータ走行領域が存在するときには前記下り坂走行制御を禁止する、
ハイブリッド車。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ハイブリッド車に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、この種のハイブリッド車としては、電動機単独走行の電動機モードと、エンジン単独走行のエンジンモードと、両者併用の併用モードとの各モードをモード切換車速に応じて切り換えるものが提案されている(例えば、特許文献1参照)。このハイブリッド車では、モード切換車速を市街地や、郊外、高速道路、トンネル等の各種環境毎に切り替えることにより、環境に適合した走行を可能としている。
【先行技術文献】
【特許文献】
【0003】
特開平06-187595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ハイブリッド車では、計画または推定された走行経路に渋滞が生じているときには、渋滞の開始地点の手前から渋滞の終了地点まで蓄電装置の蓄電割合を高めに維持する渋滞走行制御を実行する場合がある。また、計画または推定された走行経路に下り坂が存在するときには、下り坂の走行で得られる回生電力を蓄電装置に蓄えるために下り坂の開始地点の手前で蓄電装置の蓄電割合を低くする下り坂走行制御を実行する場合もある。さらに、計画または推定された走行経路にモータ走行(電動走行)すべきモータ走行領域が存在するときには、モータ走行領域をモータ走行するためにRV領域の手前で蓄電装置の蓄電割合を高くすると共にモータ走行領域をモータ走行するモータ走行領域走行制御を実行する場合も生じる。こうした渋滞走行制御や下り坂走行制御、モータ走行領域走行制御を同時に行なう場合の調整が必要となる。
【0005】
本開示のハイブリッド車は、渋滞走行制御や下り坂走行制御などの蓄電割合調整制御とモータ走行領域走行制御との調整をより適正に行なうことを主目的とする。
【課題を解決するための手段】
【0006】
本開示のハイブリッド車は、上述の主目的を達成するために以下の手段を採った。
【0007】
走行用の動力を出力可能なエンジンと、
走行用の動力を出力可能なモータと、
前記モータと電力のやりとりが可能な蓄電装置と、
前記エンジンの運転を停止した状態で前記モータからの動力により走行するモータ走行を行なうモータ走行モードと、必要に応じて前記エンジンからの動力と前記モータからの動力とにより走行する通常走行を行なう通常走行モードとを切り替えて前記エンジンおよび前記モータを制御すると共に、地図情報と自車位置とに基づく計画または推定された走行経路の情報に基づいて前記蓄電装置の蓄電割合を調整する蓄電割合調整制御を実行する制御装置と、
を備えるハイブリッド車であって、
前記制御装置は、計画または推定された走行経路にモータ走行すべき領域として設定されたモータ走行領域があるときには、前記モータ走行領域をモータ走行することが可能となるように前記モータ走行領域の開始地点から第1所定距離だけ前の地点から前記蓄電装置の蓄電割合を高くするモータ走行領域走行制御を前記蓄電割合調整制御に優先して行なう、
ことを特徴とする。
【0008】
本開示のハイブリッド車では、制御装置は、エンジンの運転を停止した状態でモータからの動力により走行するモータ走行を行なうモータ走行モードと、必要に応じてエンジンからの動力とモータからの動力とにより走行する通常走行を行なう通常走行モードとを切り替えてエンジンおよびモータを制御すると共に、地図情報と自車位置とに基づく計画または推定された走行経路の情報に基づいて蓄電装置の蓄電割合を調整する蓄電割合調整制御を実行する。そして、制御装置は、計画または推定された走行経路にモータ走行すべき領域として設定されたモータ走行領域があるときには、モータ走行領域をモータ走行することが可能となるようにモータ走行領域の開始地点から第1所定距離だけ前の地点から蓄電装置の蓄電割合を高くするモータ走行領域走行制御を蓄電割合調整制御に優先して行なう。モータ走行領域走行制御を蓄電割合走行制御に優先することにより、モータ走行領域のモータ走行を優先して行なうことができる。この結果、渋滞走行制御や下り坂走行制御などの蓄電割合調整制御とモータ走行領域走行制御との調整をより適正に行なうことができる。ここで、「計画された走行経路」は現在地から目的地までの経路案内により設定された走行経路を意味しており、「推定された走行経路」は現在地から走行が推定される走行経路を意味している。
【0009】
本開示のハイブリッド車において、前記蓄電割合調整制御は、計画または推定された走行経路に渋滞が生じているときに渋滞の開始地点より第2所定距離だけ前の地点から渋滞の終了地点まで前記蓄電装置の蓄電割合を高く維持する渋滞走行制御を含み、前記制御装置は、前記渋滞走行制御を開始する地点で前記モータ走行領域走行制御を実行していないときには前記渋滞走行制御の実行を開始し、前記渋滞走行制御を開始する地点で前記モータ走行領域走行制御を実行しているときには前記渋滞走行制御を実行せずに前記モータ走行領域走行制御を継続し、前記渋滞走行制御を実行している最中に前記モータ走行領域走行制御を開始する地点に至ったときには前記モータ走行領域に至るまで前記渋滞走行制御を継続し、前記モータ走行領域に至ったときに前記渋滞走行制御を停止して前記モータ走行領域走行制御を実行するものとしてもよい。こうすれば、モータ走行領域走行制御を渋滞走行制御に優先した状態でモータ走行領域走行制御と渋滞走行制御との調整をより適正に行なうことができる。
【0010】
本開示のハイブリッド車において、前記蓄電割合調整制御は、計画または推定された走行経路に下り坂が存在しているときに前記下り坂の開始地点より第3所定距離だけ前の地点から前記下り坂の開始地点まで前記蓄電装置の蓄電割合が低くなるように制御する下り坂走行制御を含み、前記制御装置は、前記下り坂走行制御の開始地点から前記下り坂の終了地点までの間に前記モータ走行領域が存在するときには前記下り坂走行制御を禁止するものとしてもよい。こうすれば、モータ走行領域走行制御を下り坂走行制御に優先した状態でモータ走行領域走行制御と下り坂走行制御との調整をより適正に行なうことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
方法
8日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
ロータ
19日前
トヨタ自動車株式会社
組電池
8日前
トヨタ自動車株式会社
自動車
12日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
充電器
13日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
制御装置
19日前
トヨタ自動車株式会社
駆動装置
19日前
トヨタ自動車株式会社
判定装置
14日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
二次電池
19日前
トヨタ自動車株式会社
電動車両
19日前
トヨタ自動車株式会社
蓄電装置
22日前
トヨタ自動車株式会社
電源装置
4日前
トヨタ自動車株式会社
蓄電装置
20日前
トヨタ自動車株式会社
電動車両
6日前
トヨタ自動車株式会社
配車装置
4日前
トヨタ自動車株式会社
駆動装置
19日前
トヨタ自動車株式会社
触媒装置
4日前
トヨタ自動車株式会社
検査装置
6日前
トヨタ自動車株式会社
蓄電セル
20日前
トヨタ自動車株式会社
表示装置
4日前
トヨタ自動車株式会社
駆動装置
4日前
トヨタ自動車株式会社
ステータ
4日前
トヨタ自動車株式会社
二次電池
19日前
トヨタ自動車株式会社
充電装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ