TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075560
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186822
出願日
2023-10-31
発明の名称
位置推定システム、位置推定装置、位置推定方法及び位置推定プログラム
出願人
グローリー株式会社
代理人
個人
,
個人
主分類
G06T
7/70 20170101AFI20250508BHJP(計算;計数)
要約
【課題】三次元空間における物体の位置を効率よく推定することが課題である。
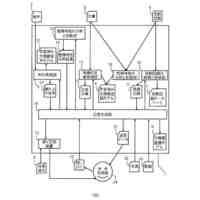
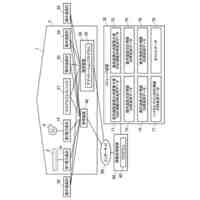
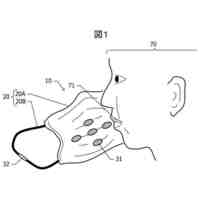
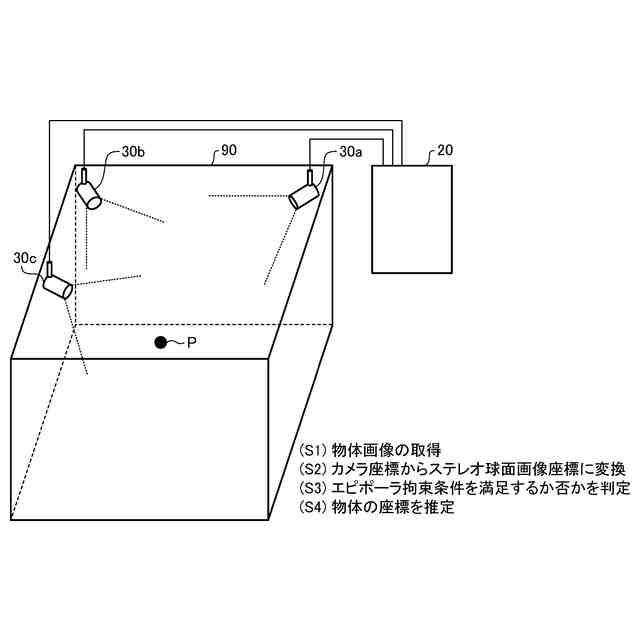
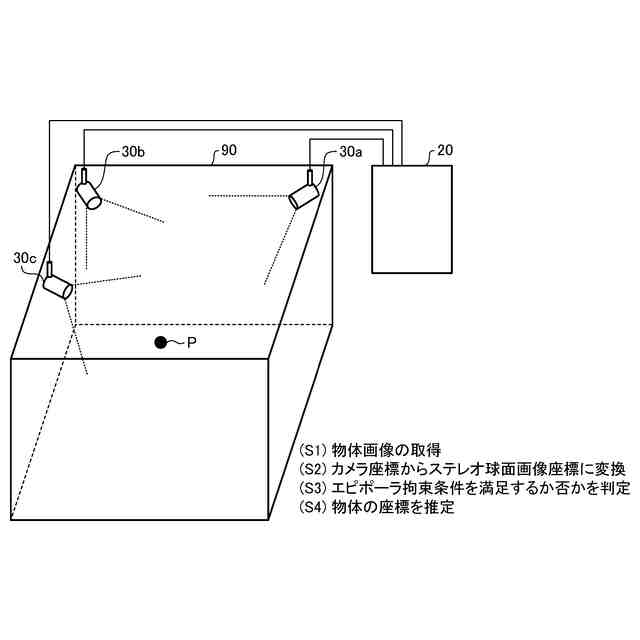
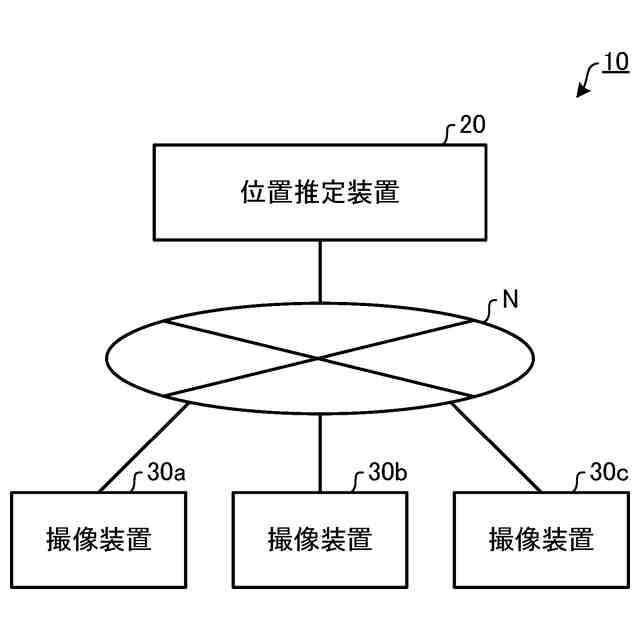
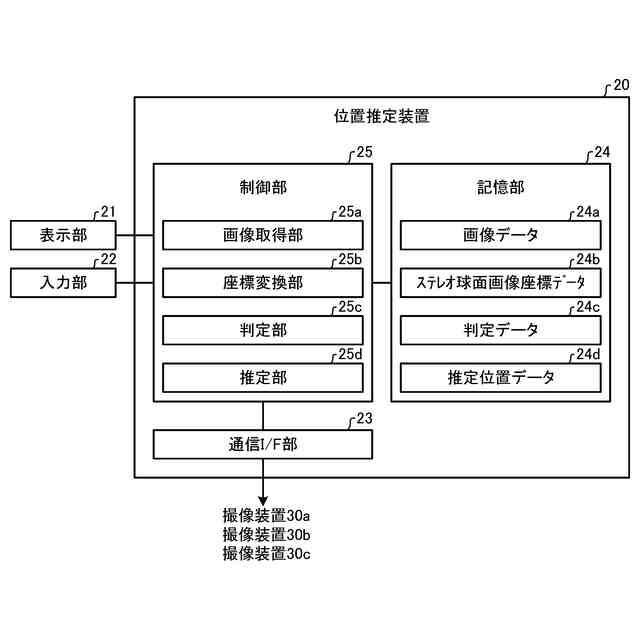
【解決手段】位置推定システム10は、位置推定装置20と3台の撮像装置30を有し、3台の撮像装置30を各撮像装置30の結像位置が三角形を形成する位置に配置する。そして、位置推定装置20は、3台の撮像装置30からの画像を取得し、画像座標からステレオ球面画像座標に変換後、各ステレオ球面画像座標においてエピポーラ拘束条件を満足するか否かを判定し、エピポーラ拘束条件を満足した場合に、判定した座標点を物体Pの座標位置であると推定する。
【選択図】図1
特許請求の範囲
【請求項1】
3台の撮像装置と、各撮像装置により撮像された画像に基づいて物体の三次元空間における位置を推定する位置推定装置とを有する位置推定システムであって、
前記3台の撮像装置は、
各撮像装置の結像位置が三角形を形成する位置に配置され、
前記位置推定装置は、
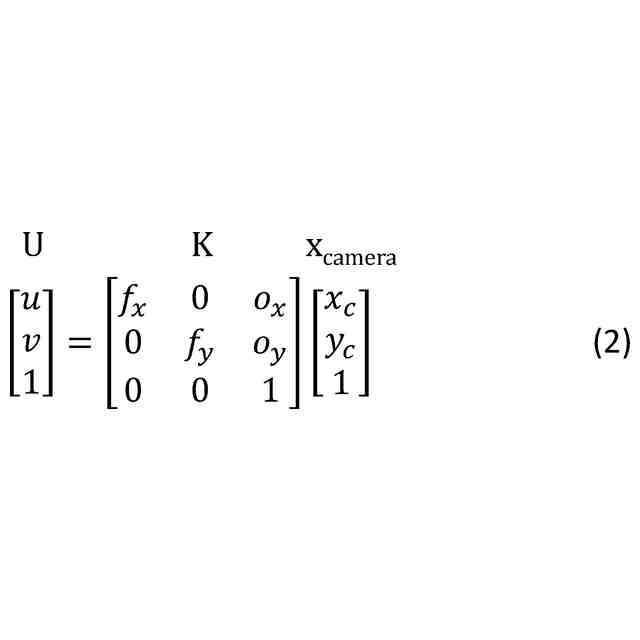
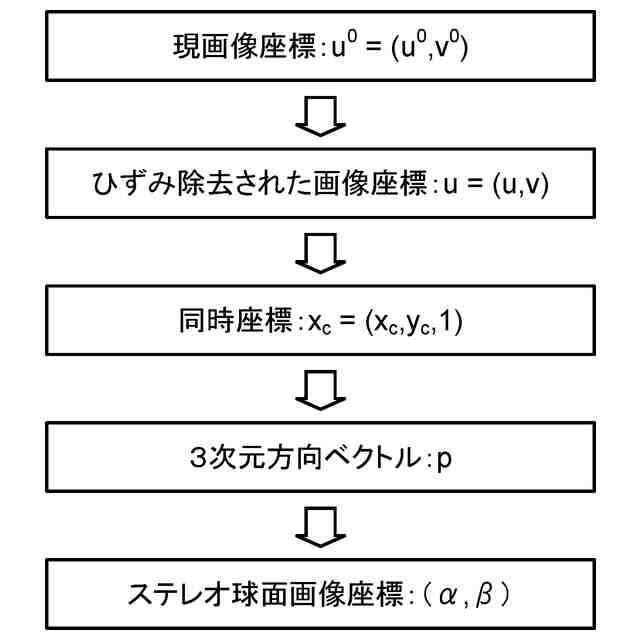
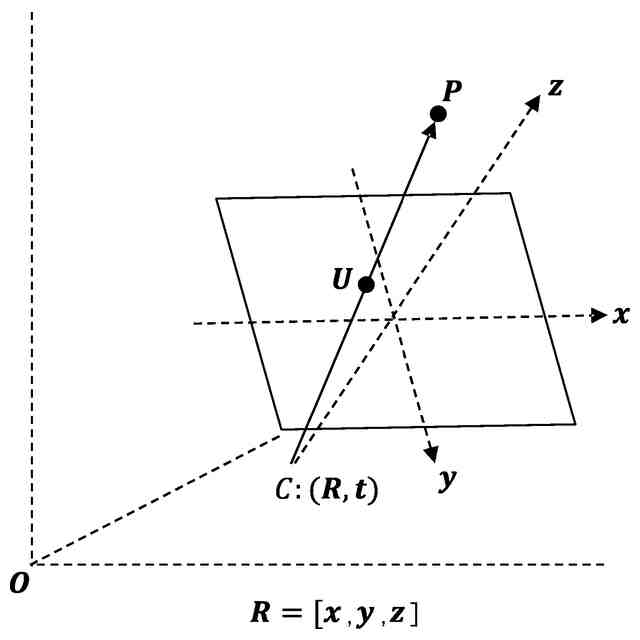
各撮像装置の画像座標における前記物体の座標点をステレオ球面画像座標における座標点にそれぞれ変換する座標変換手段と、
前記ステレオ球面画像座標における2つの撮像装置の座標点が、エピポーラ拘束を満たすか否かを判定する判定手段と、
前記判定手段により前記エピポーラ拘束を満たすと判定された座標点を前記物体の座標位置であると推定する推定手段と
を備えたことを特徴とする位置推定システム。
続きを表示(約 2,200 文字)
【請求項2】
前記座標変換手段は、
第1の撮像装置で撮像された画像座標における前記物体の座標点を前記ステレオ球面画像座標における座標点p1に変換し、
第2の撮像装置で撮像された画像座標における前記物体の座標点を前記ステレオ球面画像座標における座標点p2に変換し、
第3の撮像装置で撮像された画像座標における前記物体の座標点を前記ステレオ球面画像座標における座標点p3に変換する
ことを特徴とする請求項1に記載の位置推定システム。
【請求項3】
前記判定手段は、
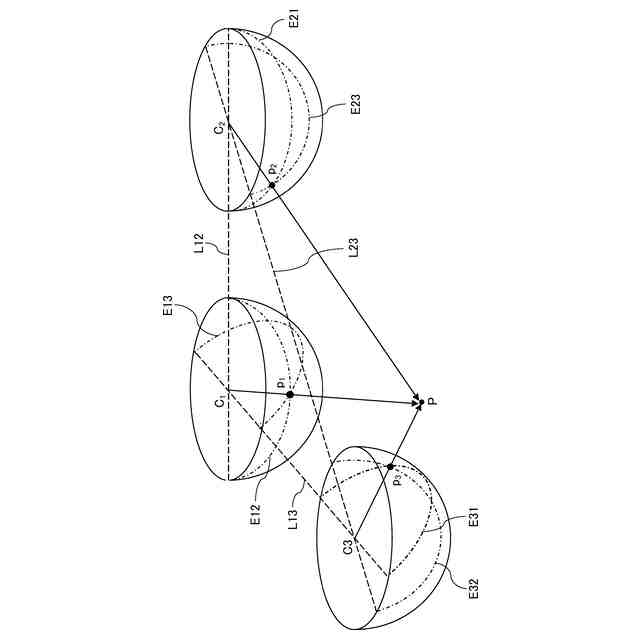
前記第1の撮像装置の結像位置を原点C1としたステレオ球面画像座標系のyz平面と前記座標点p1を通る大円との交点をなす座標点p’1と、前記第2の撮像装置の結像位置を原点C2としたステレオ球面画像座標系のyz平面と前記座標点p2を通る大円との交点をなす座標点p’2とが等しく、かつ、前記座標点p’1と前記ステレオ球面画像座標の原点とを結ぶ直線とy軸とが成す角度β1と、前記座標点p’2と前記ステレオ球面画像座標の原点とを結ぶ直線とy軸とが成す角度β2とが等しい場合に、前記ステレオ球面画像座標における前記第1の撮像装置の前記座標点p’1と前記第2の撮像装置の前記座標点p’2とがエピポーラ拘束を満たすと判定することを特徴とする請求項2に記載の位置推定システム。
【請求項4】
前記位置推定装置は、
各撮像装置で撮像された人物を前記物体として骨格の推定を行う骨格推定手段をさらに備え、
前記推定手段は、
前記骨格推定手段により推定された骨格の首又は手首の座標位置を推定することを特徴とする請求項1に記載の位置推定システム。
【請求項5】
前記位置推定装置は、
前記推定手段により推定された手首の座標位置と、所定の物品が取り出された場合に得られる位置情報に基づいて、前記物品の取り出しの有無を検出する物品取出検出手段と、
前記物品取出検出手段による前記物品の取り出しが検出されたならば、前記物品の位置と前記手首の位置とが最も近い人物と取り出された前記物品との紐付けを行う紐付け手段と
をさらに備えたことを特徴とする請求項4に記載の位置推定システム。
【請求項6】
前記位置推定装置は、
各撮像装置で撮像された人物を前記物体として骨格の推定を行う骨格推定手段をさらに備え、
前記骨格推定手段により推定された骨格の首、肘及び手首の座標位置を推定する第2の推定手段と、
前記首、肘及び手首の座標位置と物品との平均距離と分散に基づいて尤度を算出する尤度算出手段と、
前記尤度算出手段による算出結果に基づいて、前記物品と人物との紐付けを行う第2の紐付け手段と
を備えたことを特徴とする請求項1に記載の位置推定システム。
【請求項7】
各撮像装置の結像位置が三角形を形成する位置に配置され3台の撮像装置により撮像された画像に基づいて物体の三次元空間における位置を推定する位置推定装置であって、
各撮像装置の画像座標における前記物体の座標点をステレオ球面画像座標における座標点にそれぞれ変換する座標変換手段と、
前記ステレオ球面画像座標における2つの撮像装置の座標点が、エピポーラ拘束を満たすか否かを判定する判定手段と、
前記判定手段により前記エピポーラ拘束を満たすと判定された座標点を前記物体の座標位置であると推定する推定手段と
を備えたことを特徴とする位置推定装置。
【請求項8】
3台の撮像装置と、各撮像装置により撮像された画像に基づいて物体の三次元空間における位置を推定する位置推定装置とを有する位置推定システムで実行される位置推定方法であって、
前記3台の撮像装置が、各撮像装置の結像位置が三角形を形成する位置に配置され、
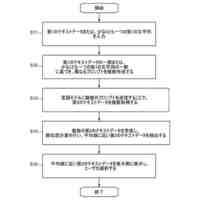
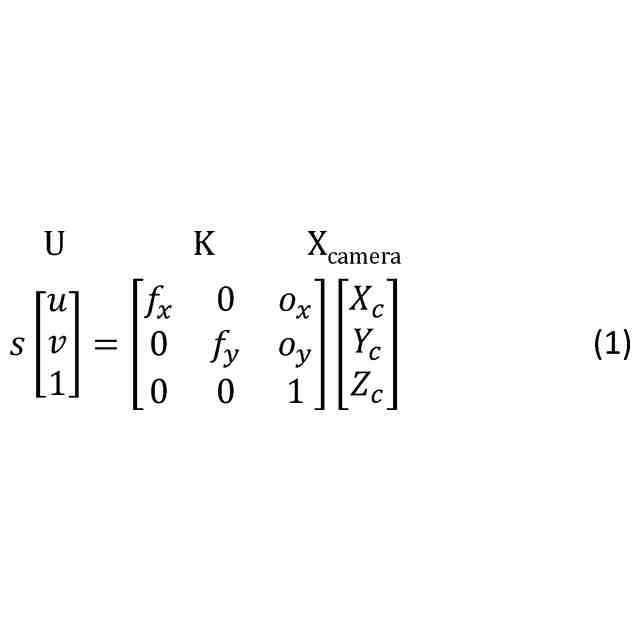
前記位置推定装置が、各撮像装置の画像座標における前記物体の座標点をステレオ球面画像座標における座標点にそれぞれ変換する座標変換工程と、
前記位置推定装置が、前記ステレオ球面画像座標における2つの撮像装置の座標点が、エピポーラ拘束を満たすか否かを判定する判定工程と、
前記位置推定装置が、前記判定工程により前記エピポーラ拘束を満たすと判定された座標点を前記物体の座標位置であると推定する推定工程と
を含むことを特徴とする位置推定方法。
【請求項9】
各撮像装置の結像位置が三角形を形成する位置に配置され3台の撮像装置により撮像された画像に基づいて物体の三次元空間における位置を推定する位置推定装置で実行される位置推定プログラムであって、
各撮像装置の画像座標における前記物体の座標点をステレオ球面画像座標における座標点にそれぞれ変換する座標変換手順と、
前記ステレオ球面画像座標における2つの撮像装置の座標点が、エピポーラ拘束を満たすか否かを判定する判定手順と、
前記判定手順により前記エピポーラ拘束を満たすと判定された座標点を前記物体の座標位置であると推定する推定手順と
をコンピュータに実行させることを特徴とする位置推定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、三次元空間における物体の位置を効率よく推定する位置推定システム、位置推定装置、位置推定方法及び位置推定プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、無人店舗において商品の無人販売を行う場合に、どの顧客がどの商品を手に取ったのかを特定することが重要となる。このため、店舗で商品を購入する際に、顧客が商品棚から商品を取出して精算所に行くだけで、顧客がどの商品を購入しようとしているかを自動で判定し、精算を自動で行うことができる技術が知られている。
【0003】
例えば特許文献1には、店内に設けられた複数のカメラ(距離センサ)により顧客を追跡して顧客の位置情報を取得し、商品棚に設けられた重量センサからどの商品が取り出されたかを検出し、顧客と商品を紐づけて管理することにより、顧客が購入しようとしている商品を特定し、係員等が居なくても自動で精算が行えるよう構成した情報処理システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第7225434号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1のものは、複数のカメラ(距離センサ)により顧客の位置情報を正確に取得することが難しいという問題がある。特に、複数台のカメラでそれぞれ撮像した物体の位置がずれる場合に、同じ物体を指すか否かの判定に処理時間を要することになる。
【0006】
本発明は、上記従来技術による問題点(課題)を解決するためになされたものであって、三次元空間における物体の位置を効率よく推定することができる位置推定システム、位置推定装置、位置推定方法及び位置推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するため、本発明は、3台の撮像装置と、各撮像装置により撮像された画像に基づいて物体の三次元空間における位置を推定する位置推定装置とを有する位置推定システムであって、前記3台の撮像装置は、各撮像装置の結像位置が三角形を形成する位置に配置され、前記位置推定装置は、各撮像装置の画像座標における前記物体の座標点をステレオ球面画像座標における座標点にそれぞれ変換する座標変換手段と、前記ステレオ球面画像座標における2つの撮像装置の座標点が、エピポーラ拘束を満たすか否かを判定する判定手段と、前記判定手段により前記エピポーラ拘束を満たすと判定された座標点を前記物体の座標位置であると推定する推定手段とを備えたことを特徴とする。
【0008】
また、本発明は、上記発明において、前記座標変換手段は、第1の撮像装置で撮像された画像座標における前記物体の座標点を前記ステレオ球面画像座標における座標点p
1
に変換し、第2の撮像装置で撮像された画像座標における前記物体の座標点を前記ステレオ球面画像座標における座標点p
2
に変換し、第3の撮像装置で撮像された画像座標における前記物体の座標点を前記ステレオ球面画像座標における座標点p
3
に変換することを特徴とする。
【0009】
また、本発明は、上記発明において、前記判定手段は、前記第1の撮像装置の結像位置を原点C
1
としたステレオ球面画像座標系のyz平面と前記座標点p
1
を通る大円との交点をなす座標点p’
1
と、前記第2の撮像装置の結像位置を原点C
2
としたステレオ球面画像座標系のyz平面と前記座標点p
2
を通る大円との交点をなす座標点p’
2
とが等しく、かつ、前記座標点p’
1
と前記ステレオ球面画像座標の原点とを結ぶ直線とy軸とが成す角度β
1
と、前記座標点p’
2
と前記ステレオ球面画像座標の原点とを結ぶ直線とy軸とが成す角度β
2
とが等しい場合に、前記ステレオ球面画像座標における前記第1の撮像装置の前記座標点p’
1
と前記第2の撮像装置の前記座標点p’
2
とがエピポーラ拘束を満たすと判定することを特徴とする。
【0010】
また、本発明は、上記発明において、前記位置推定装置は、各撮像装置で撮像された人物を前記物体として骨格の推定を行う骨格推定手段をさらに備え、前記推定手段は、前記骨格推定手段により推定された骨格の首又は手首の座標位置を推定することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非正規コート
1か月前
個人
物品給付年金
3日前
個人
RFタグ読取装置
16日前
個人
人物再現システム
1か月前
個人
在宅介護システム
16日前
個人
AI飲食最適化プラグイン
24日前
キヤノン株式会社
通信装置
4日前
個人
電話管理システム及び管理方法
25日前
有限会社ノア
データ読取装置
1か月前
個人
広告提供システムおよびその方法
1か月前
株式会社ザメディア
出席管理システム
1か月前
株式会社CROSLAN
支援装置
16日前
個人
日誌作成支援システム
1か月前
株式会社タクテック
商品取出集品システム
1か月前
ミサワホーム株式会社
情報処理装置
3日前
ひびきの電子株式会社
認証システム
18日前
長屋印刷株式会社
画像形成システム
16日前
個人
ポイント還元付き配送システム
1か月前
トヨタ自動車株式会社
工程計画装置
1か月前
ミサワホーム株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
作業判定方法
1か月前
オムロン株式会社
回転装置及びマウス
20日前
オベック実業株式会社
接続構造
1か月前
株式会社ユピテル
電子機器及びプログラム等
6日前
株式会社村田製作所
動き検知装置
1か月前
トヨタ自動車株式会社
情報処理システム
1か月前
ゼネラル株式会社
RFIDタグ付き物品
1か月前
個人
アルバム作成システム及びアルバム作成方法
18日前
個人
コンテンツ配信システム
1か月前
株式会社国際電気
支援システム
1か月前
株式会社実身美
ワーキングシェアリングシステム
1か月前
トヨタ自動車株式会社
情報処理方法
1か月前
トヨタ自動車株式会社
情報処理装置
2日前
株式会社ドクター中松創研
生成AIの適切使用法
1か月前
株式会社デンソー
電子制御装置
10日前
株式会社半導体エネルギー研究所
情報処理システム
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ