TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025083750
公報種別
公開特許公報(A)
公開日
2025-06-02
出願番号
2023197315
出願日
2023-11-21
発明の名称
車両運転支援装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
50/08 20200101AFI20250526BHJP(車両一般)
要約
【課題】より確実に運転者の好む形態で車両の車線変更を自動で行うことができる車両運転支援装置を提供する。
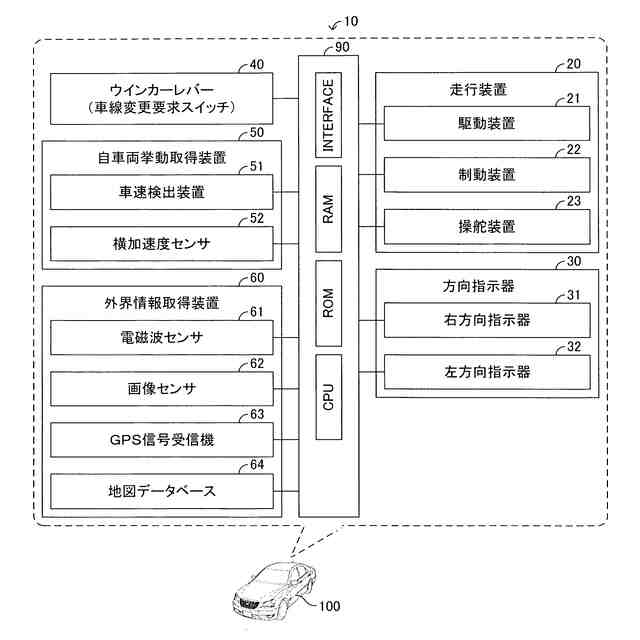
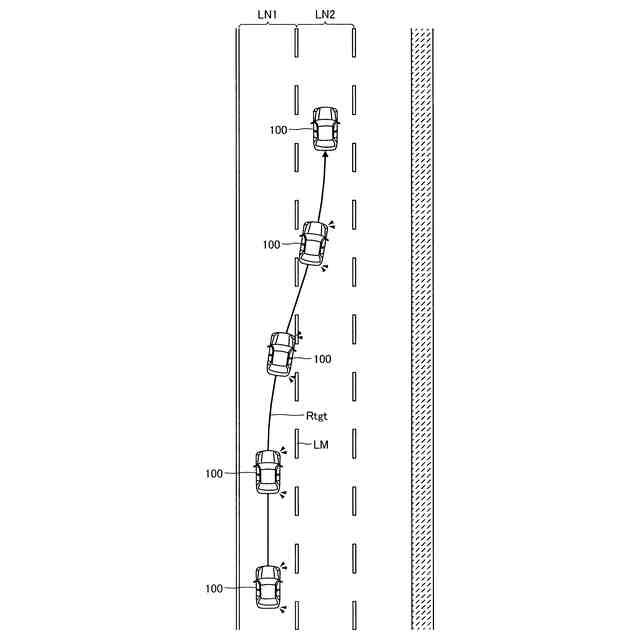
【解決手段】車両運転支援装置10は、自車両100の操作者が手動車線変更を行っている期間に手動車線変更に係る特性を実車線変更特性として取得し、実車線変更特性に基づいて設定した目標車線変更特性に従って自動車線変更を行う。車両運転支援装置は、実車線変更特性として、自車両が所定の状態となってから所定の状態とは別の状態に移行するまでに要した実所要時間、及び、自車両の横速度の最大値である実最大横速度を取得し、目標車線変更特性として、自車両が所定の状態に対応する状態となってから自車両を別の状態に対応する状態に移行させるまでの時間の目標値を実所要時間に基づいて設定し、横速度の最大値の目標値を実最大横速度に基づいて設定する。
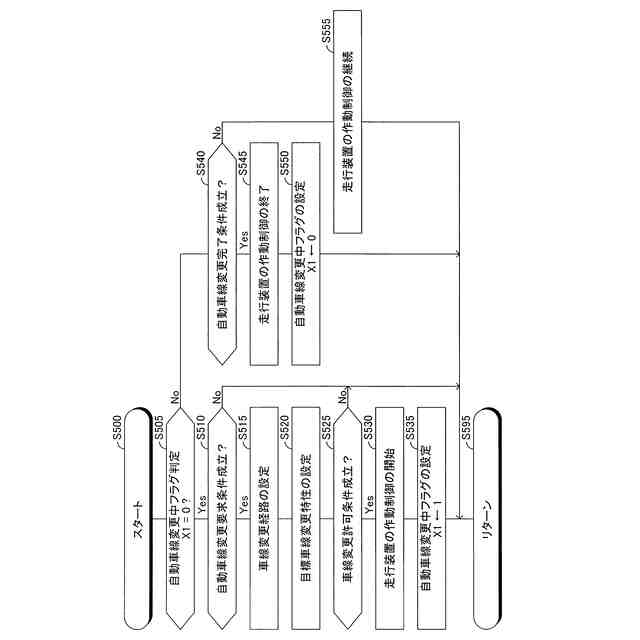
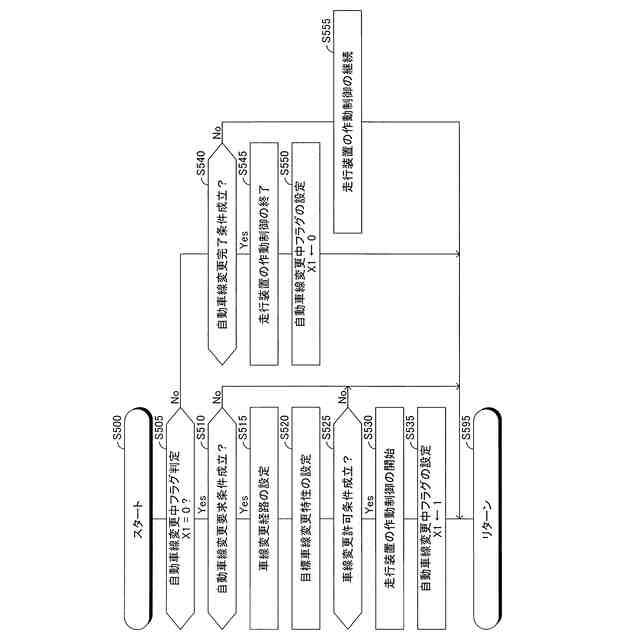
【選択図】 図5
特許請求の範囲
【請求項1】
自車両の車線変更を自動で行う車線変更制御を実行する制御装置を備え、
前記制御装置は、
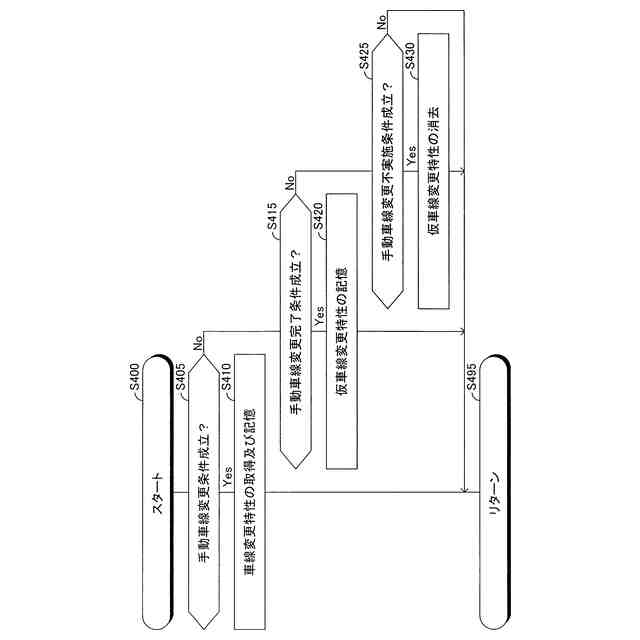
前記自車両の操作者が手動による前記自車両の車線変更である手動車線変更を行っている期間である手動車線変更期間に当該手動車線変更に係る特性を実車線変更特性として取得し、
前記実車線変更特性に基づいて設定した目標車線変更特性に従って前記車線変更制御による前記自車両の車線変更である自動車線変更を行う、
ように構成されている、
車両運転支援装置において、
前記制御装置は、
前記実車線変更特性として、前記自車両が所定の状態となってから該所定の状態とは別の状態に移行するまでに要した時間である実所要時間、及び、横方向への前記自車両の移動速度である横速度の最大値である実最大横速度を取得し、
前記目標車線変更特性として、前記自車両が前記所定の状態に対応する状態となってから前記自車両を前記別の状態に対応する状態に移行させるまでの時間の目標値である目標所要時間を前記実所要時間に基づいて設定し、前記横速度の最大値の目標値である目標最大横速度を前記実最大横速度に基づいて設定する、
ように構成されている、
車両運転支援装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の車両運転支援装置において、
前記制御装置は、
前記実車線変更特性として、横方向への前記自車両の移動が開始されてから前記横速度が最大値に到達するまでに要した時間である実最大横速度到達時間を取得し、
前記目標車線変更特性として、横方向への前記自車両の移動を開始させてから前記横速度を最大値に到達させるまでの時間の目標値である目標最大横速度到達時間を前記実最大横速度到達時間に基づいて設定する、
ように構成されている、
車両運転支援装置。
【請求項3】
請求項1に記載の車両運転支援装置において、
前記制御装置は、
前記実車線変更特性として、横方向への前記自車両の加速度である横加速度の最大値である実最大横加速度と、前記横加速度の変化率である横加速度勾配の最大値である実最大横加速度勾配と、を取得し、
前記目標車線変更特性として、前記横加速度の最大値の目標値である目標最大横加速度を前記実最大横加速度に基づいて設定し、前記横加速度勾配の最大値の目標値である目標最大横加速度勾配を前記実最大横加速度勾配に基づいて設定する、
ように構成されている、
車両運転支援装置。
【請求項4】
請求項1に記載の車両運転支援装置において、
前記制御装置は、
前記実車線変更特性として、前記手動車線変更期間に変化した前記横速度の軌跡である実横速度変化プロファイルと、前記手動車線変更期間に変化した横方向への前記自車両の加速度である横加速度の軌跡である実横加速度変化プロファイルと、前記手動車線変更期間に変化した横方向への前記自車両の加速度の変化率である横加速度勾配の軌跡である実横加速度勾配変化プロファイルと、を取得し、
前記目標車線変更特性として、前記車線変更制御により変化せしめられる前記横速度の目標値の軌跡である目標横速度変化プロファイルを前記実横速度変化プロファイルに基づいて設定し、前記車線変更制御により変化せしめられる前記横加速度の目標値の軌跡である目標横加速度変化プロファイルを前記実横加速度変化プロファイルに基づいて設定し、前記車線変更制御により変化せしめられる前記横加速度勾配の目標値の軌跡である目標横加速度勾配変化プロファイルを前記実横加速度勾配変化プロファイルに基づいて設定する、
ように構成されている、
車両運転支援装置。
【請求項5】
請求項1に記載の車両運転支援装置において、
前記制御装置は、
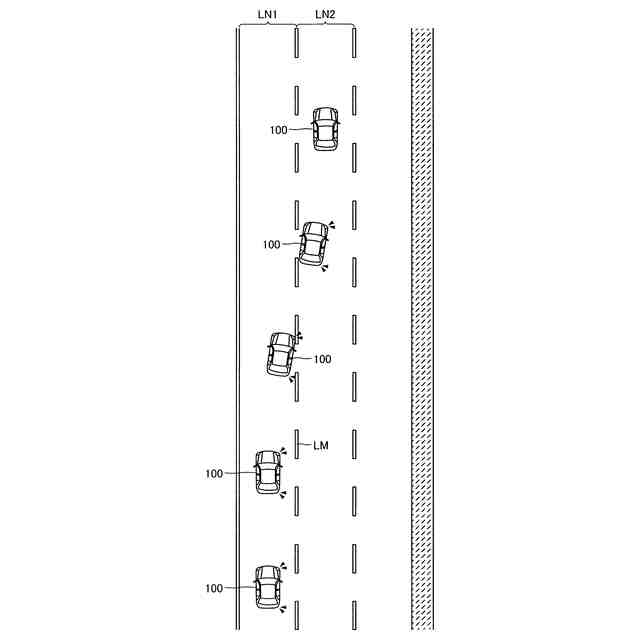
前記実所要時間として、前記操作者が前記手動車線変更を行う意思を示す操作を行ってから横方向への前記自車両の移動が開始されるまでに要した時間である実横移動開始時間、横方向への前記自車両の移動が開始されてから前記自車両が区画線を跨ぎ始めるまでに要した時間である実跨ぎ開始時間、及び、前記自車両が前記区画線を跨ぎ始めてから当該区画線を跨ぎ終えるまでに要した時間である実跨ぎ完了時間を取得し、
前記目標所要時間として、前記車線変更制御の実行を要求する操作が行われてから横方向への前記自車両の移動を開始させるまでの時間の目標値である目標横移動開始時間を前記実横移動開始時間に基づいて設定し、横方向への前記自車両の移動を開始させてから前記自車両に区画線を跨ぎ始めさせるまでの時間の目標値である目標跨ぎ開始時間を前記実跨ぎ開始時間に基づいて設定し、前記自車両に前記区画線を跨ぎ始めさせてから当該区画線を跨ぎ終えさせるまでの時間の目標値である目標跨ぎ完了時間を前記実跨ぎ完了時間に基づいて設定する、
ように構成されている、
車両運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両運転支援装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
車両の車線変更を自動で行う機能を備えた車両運転支援装置が知られている。又、車両の車線変更を自動で行う際、運転者の好む形態で車両の車線変更を行うことが望まれる点が指摘されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-101400号公報
【発明の概要】
【0004】
しかしながら、運転者の好む形態で車両の車線変更を自動で行うために必要な具体的な構成については、改善の余地がある。
【0005】
本発明の目的は、より確実に運転者の好む形態で車両の車線変更を自動で行うことができる車両運転支援装置を提供することにある。
【0006】
本発明に係る車両運転支援装置は、自車両の車線変更を自動で行う車線変更制御を実行する制御装置を備えている。前記制御装置は、前記自車両の操作者が手動による前記自車両の車線変更である手動車線変更を行っている期間である手動車線変更期間に当該手動車線変更に係る特性を実車線変更特性として取得し、前記実車線変更特性に基づいて設定した目標車線変更特性に従って前記車線変更制御による前記自車両の車線変更である自動車線変更を行うように構成されている。更に、前記制御装置は、前記実車線変更特性として、前記自車両が所定の状態となってから該所定の状態とは別の状態に移行するまでに要した時間である実所要時間、及び、横方向への前記自車両の移動速度である横速度の最大値である実最大横速度を取得し、前記目標車線変更特性として、前記自車両が前記所定の状態に対応する状態となってから前記自車両を前記別の状態に対応する状態に移行させるまでの時間の目標値である目標所要時間を前記実所要時間に基づいて設定し、前記横速度の最大値の目標値である目標最大横速度を前記実最大横速度に基づいて設定するように構成されている。
【0007】
操作者が手動で自車両の車線変更を行う場合において、例えば、方向指示器が作動されてから横方向への自車両の移動が開始されるまでの時間や、横方向への自車両の移動が開始されてから自車両が区画線を跨ぎ始めるまでの時間等、自車両の状態が或る状態から別の状態に移行するまでに要した時間(実所要時間)には、車線変更についての操作者の好みが反映される。又、操作者が手動で自車両の車線変更を行う場合において、自車両の横速度の最大値(実最大横速度)にも、車線変更についての操作者の好みが反映される。
【0008】
本発明に係る車両運転支援装置によれば、実所要時間及びが取得され、目標所要時間(自車両が所定の状態に対応する状態となってから自車両を別の状態に対応する状態に移行させるまでの時間の目標値)が実所要時間に基づいて設定され、目標最大横速度(自車両の横速度の最大値の目標値)が実最大横速度に基づいて設定され、これら目標所要時間及び目標最大横速度に従って自動車線変更が行われる。このため、より確実に操作者の好む形態で自車両の車線変更を自動で行うことができる。
【0009】
尚、本発明に係る車両運転支援装置において、前記制御装置は、前記実車線変更特性として、横方向への前記自車両の移動が開始されてから前記横速度が最大値に到達するまでに要した時間である実最大横速度到達時間を取得し、前記目標車線変更特性として、横方向への前記自車両の移動を開始させてから前記横速度を最大値に到達させるまでの時間の目標値である目標最大横速度到達時間を前記実最大横速度到達時間に基づいて設定するように構成され得る。
【0010】
操作者が手動で自車両の車線変更を行う場合において、横方向への自車両の移動が開始されてから自車両の横速度が最大値に到達するまでの時間(実最大横速度到達時間)には、車線変更についての操作者の好みが反映される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
モータ
1日前
トヨタ自動車株式会社
パネル
3日前
トヨタ自動車株式会社
モータ
3日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
関節機構
9日前
トヨタ自動車株式会社
電源装置
3日前
トヨタ自動車株式会社
情報機器
3日前
トヨタ自動車株式会社
回転電機
4日前
トヨタ自動車株式会社
内燃機関
今日
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
内燃機関
4日前
トヨタ自動車株式会社
予測方法
9日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
電動車両
7日前
トヨタ自動車株式会社
二次電池
7日前
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
内燃機関
7日前
トヨタ自動車株式会社
水系電池
今日
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
エンジン
8日前
トヨタ自動車株式会社
ドローン
8日前
トヨタ自動車株式会社
製造装置
8日前
トヨタ自動車株式会社
剥離装置
8日前
トヨタ自動車株式会社
防曇装置
今日
トヨタ自動車株式会社
電池パック
8日前
トヨタ自動車株式会社
電池パック
7日前
トヨタ自動車株式会社
電気自動車
10日前
トヨタ自動車株式会社
カバー部材
3日前
トヨタ自動車株式会社
誘導電動機
今日
トヨタ自動車株式会社
電池パック
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ