TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025102216
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219539
出願日
2023-12-26
発明の名称
超解像度学習方法、超解像度学習装置、及び、超解像度学習プログラム
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
3/4053 20240101AFI20250701BHJP(計算;計数)
要約
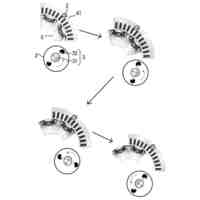
【課題】三次元の物理場を高解像度化する場合であっても、高解像度化を行う学習モデルを作成する時間の増加を抑制することができる、超解像度学習方法、超解像度学習装置、及び、超解像度学習プログラムを提供する。
【解決手段】超解像度学習方法、超解像度学習装置、及び、超解像度学習プログラムによれば、物理場を表現する第1データと、第1データよりも高い空間解像度で物理場を表現する第2データと、を含む教師データを処理する。第1データを学習モデルに入力した際に、学習モデルから出力される出力データを算出し、物理場の各点で、出力データと第2データに基づいて損失を算出し、物理場の各点で、注目する物体からの距離に基づいて係数を設定する。損失に係数を乗算した結果を、物理場の全体で合計して合計損失を算出し、合計損失に基づいて学習モデルの訓練を実行する。距離が第1距離である場合に設定される係数と比較して、距離が第1距離よりも大きな第2距離である場合に設定される係数が小さい。
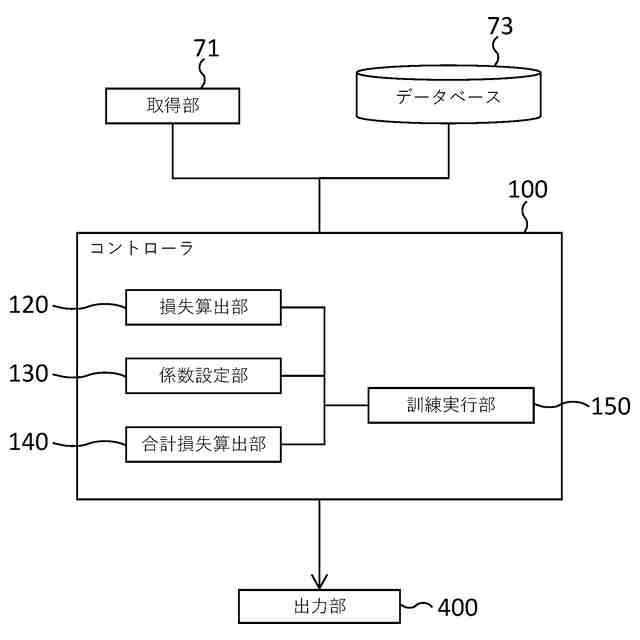
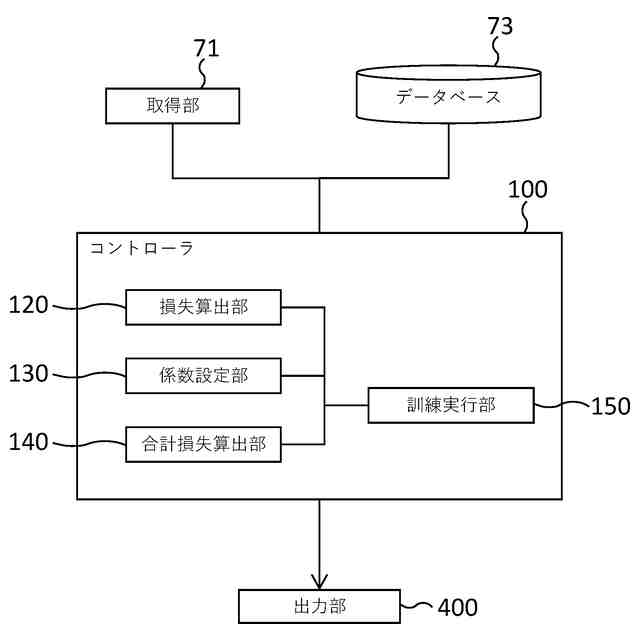
【選択図】図1
特許請求の範囲
【請求項1】
物理場を表現する第1データと、
前記第1データよりも高い空間解像度で前記物理場を表現する第2データと、
を含む教師データが入力されるコントローラを制御する超解像度学習方法であって、
前記コントローラは、
前記第1データを学習モデルに入力した際に、前記学習モデルから出力される出力データを算出し、
前記物理場の各点で、前記出力データと前記第2データに基づいて損失を算出し、
前記物理場の各点で、注目する物体からの距離に基づいて係数を設定し、
前記損失に前記係数を乗算した結果を、前記物理場の全体で合計して合計損失を算出し、
前記合計損失に基づいて前記学習モデルの訓練を実行し、
前記距離が第1距離である場合に設定される前記係数と比較して、前記距離が前記第1距離よりも大きな第2距離である場合に設定される前記係数が小さい、
超解像度学習方法。
続きを表示(約 1,300 文字)
【請求項2】
前記距離が大きい場合に設定される前記係数よりも、前記距離が小さい場合に設定される前記係数が小さい、請求項1に記載の超解像度学習方法。
【請求項3】
前記コントローラは、前記距離が第1所定距離以下である場合に、前記係数を第1所定値に設定する、請求項1に記載の超解像度学習方法。
【請求項4】
前記コントローラは、前記距離が第2所定距離以上である場合に、前記係数を第2所定値に設定する、請求項1に記載の超解像度学習方法。
【請求項5】
前記コントローラは、流体が通過しない領域における前記係数を0に設定する、請求項1に記載の超解像度学習方法。
【請求項6】
前記コントローラは、前記物体の表面からの距離に基づいて前記係数を設定する、請求項1に記載の超解像度学習方法。
【請求項7】
前記物理場は、流体の密度場、速度場、圧力場、密度場、温度場の少なくともいずれかを含む、請求項1~6のいずれか一項に記載の超解像度学習方法。
【請求項8】
物理場を表現する第1データと、
前記第1データよりも高い空間解像度で前記物理場を表現する第2データと、
を含む教師データが入力されるコントローラを備える超解像度学習装置であって、
前記コントローラは、
前記第1データを学習モデルに入力した際に、前記学習モデルから出力される出力データを算出し、
前記物理場の各点で、前記出力データと前記第2データに基づいて損失を算出し、
前記物理場の各点で、注目する物体からの距離に基づいて係数を設定し、
前記損失に前記係数を乗算した結果を、前記物理場の全体で合計して合計損失を算出し、
前記合計損失に基づいて前記学習モデルの訓練を実行し、
前記距離が第1距離である場合に設定される前記係数と比較して、前記距離が前記第1距離よりも大きな第2距離である場合に設定される前記係数が小さい、
超解像度学習装置。
【請求項9】
物理場を表現する第1データと、
前記第1データよりも高い空間解像度で前記物理場を表現する第2データと、
を含む教師データが入力されるコントローラにおいて実行するための超解像度学習プログラムであって、
前記第1データを学習モデルに入力した際に、前記学習モデルから出力される出力データを算出するステップと、
前記物理場の各点で、前記出力データと前記第2データに基づいて損失を算出するステップと、
前記物理場の各点で、注目する物体からの距離に基づいて係数を設定するステップと、
前記損失に前記係数を乗算した結果を、前記物理場の全体で合計して合計損失を算出するステップと、
前記合計損失に基づいて前記学習モデルの訓練を実行するステップと、を含み、
前記距離が第1距離である場合に設定される前記係数と比較して、前記距離が前記第1距離よりも大きな第2距離である場合に設定される前記係数が小さい、
超解像度学習プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、超解像度学習方法、超解像度学習装置、及び、超解像度学習プログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
少数のデータで学習した複数の畳み込みニューラルモデルを併用して、元の画像から複数の高解像度画像の候補を生成し、生成した複数の高解像度画像の候補の中から、元の画像との差分が最も小さい候補を、高解像度画像として出力する技術が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許6236731号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示される技術を用いて三次元の物理場を高解像度化する場合には、学習対象となるデータのサイズが増加することから、少数のデータであっても複数の学習モデルを作成する時間が増加しやすいという問題がある。
【0005】
本発明は、上記問題に鑑みてなされたものである。その目的とするところは、三次元の物理場を高解像度化する場合であっても、高解像度化を行う学習モデルを作成する時間の増加を抑制することができる、超解像度学習方法、超解像度学習装置、及び、超解像度学習プログラムを提供することにある。
【課題を解決するための手段】
【0006】
上述した問題を解決するために、本発明の一態様に係る超解像度学習方法、超解像度学習装置、及び、超解像度学習プログラムによれば、物理場を表現する第1データと、第1データよりも高い空間解像度で物理場を表現する第2データと、を含む教師データを処理する。第1データを学習モデルに入力した際に、学習モデルから出力される出力データを算出し、物理場の各点で、出力データと第2データに基づいて損失を算出し、物理場の各点で、注目する物体からの距離に基づいて係数を設定する。損失に係数を乗算した結果を、物理場の全体で合計して合計損失を算出し、合計損失に基づいて学習モデルの訓練を実行する。距離が第1距離である場合に設定される係数と比較して、距離が第1距離よりも大きな第2距離である場合に設定される係数が小さい。
【発明の効果】
【0007】
本発明によれば、三次元の物理場を高解像度化する場合であっても、高解像度化を行う学習モデルを作成する時間の増加を抑制することができる。
【図面の簡単な説明】
【0008】
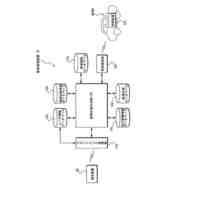
本発明の一実施形態に係る超解像度学習装置の構成を示すブロック図である。
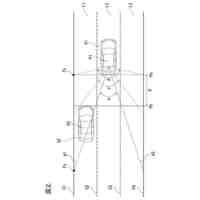
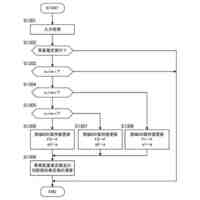
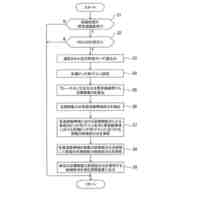
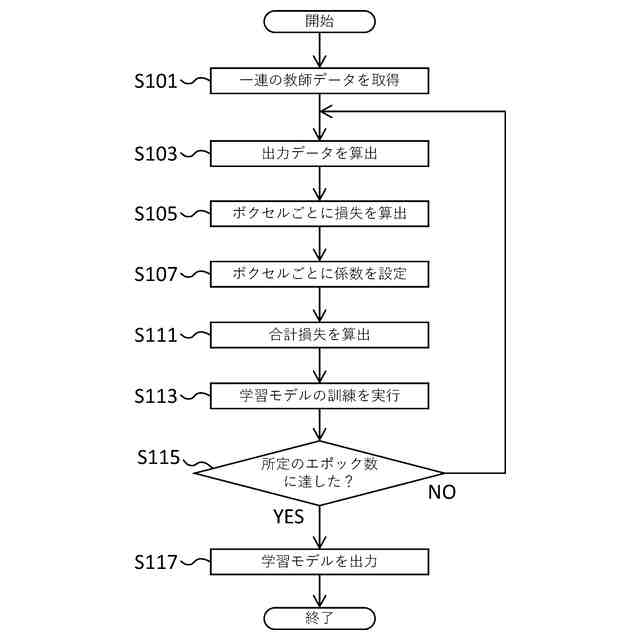
本発明の一実施形態に係る超解像度学習装置の処理を示すフローチャートである。
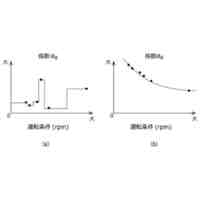
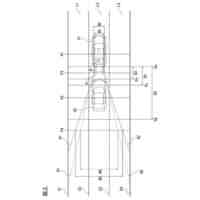
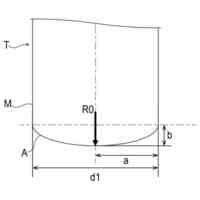
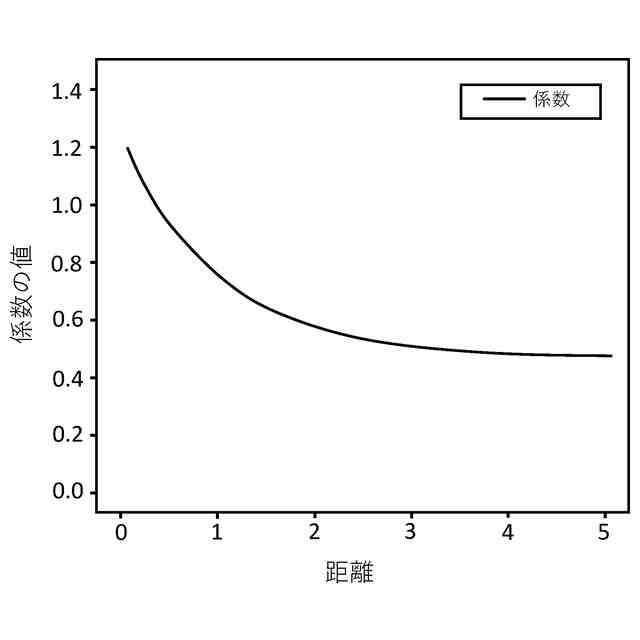
物体からの距離に対する係数の変化を示す図である。
【発明を実施するための形態】
【0009】
次に、図面を参照して、本発明の実施の形態を詳細に説明する。説明において、同一のものには同一符号を付して重複説明を省略する。
【0010】
[超解像度学習装置の構成]
図1は、本実施形態に係る超解像度学習装置の構成を示すブロック図である。図1に示すように、超解像度学習装置は、取得部71と、データベース73と、コントローラ100と、出力部400と、を備える。コントローラ100は、有線あるいは無線の通信路によって、取得部71、データベース73、出力部400と接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
回転電機
今日
日産自動車株式会社
電子機器
4日前
日産自動車株式会社
車載装置
26日前
日産自動車株式会社
冷却装置
20日前
日産自動車株式会社
成形装置
19日前
日産自動車株式会社
逐次成形方法
19日前
日産自動車株式会社
選別回収装置
28日前
日産自動車株式会社
光電変換装置
25日前
日産自動車株式会社
液滴吐出装置
21日前
日産自動車株式会社
位置補正部材
3日前
日産自動車株式会社
燃料電池システム
26日前
日産自動車株式会社
燃料電池システム
26日前
日産自動車株式会社
リチウム二次電池
19日前
日産自動車株式会社
リチウム二次電池
19日前
日産自動車株式会社
リチウム二次電池
19日前
日産自動車株式会社
導電回路の製造方法
20日前
日産自動車株式会社
車両用冷却システム
28日前
日産自動車株式会社
活物質の回復処理方法
27日前
日産自動車株式会社
インクジェットヘッド
20日前
日産自動車株式会社
離散時間モデルの算出方法
25日前
日産自動車株式会社
ロックプレートの圧入治具
19日前
日産自動車株式会社
冷却装置及び気流制御方法
20日前
日産自動車株式会社
半導体装置及びその製造方法
20日前
日産自動車株式会社
配車管理装置及び配車管理方法
27日前
日産自動車株式会社
表示制御方法及び表示制御装置
18日前
日産自動車株式会社
車両制動方法及び車両制動装置
28日前
日産自動車株式会社
表示制御方法及び表示制御装置
18日前
日産自動車株式会社
充電管理方法及び充電管理装置
20日前
日産自動車株式会社
車両制御方法及び車両制御装置
19日前
日産自動車株式会社
車両制動方法及び車両制動装置
28日前
日産自動車株式会社
燃料電池及び燃料電池の製造方法
19日前
日産自動車株式会社
逐次成形用工具及び逐次成形方法
18日前
日産自動車株式会社
キャリア及びキャリアの車両搭載構造
19日前
日産自動車株式会社
内燃機関の凝縮水処理方法および装置
21日前
日産自動車株式会社
車両のバックドア用のスライドフレーム
19日前
日産自動車株式会社
光輝材含有塗膜の形成方法及び形成装置
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ