TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109232
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024002937
出願日
2024-01-12
発明の名称
長尺用無人搬送台車
出願人
日本車輌製造株式会社
代理人
個人
主分類
B62D
63/02 20060101AFI20250717BHJP(鉄道以外の路面車両)
要約
【課題】長尺搬送対象物の搭載を安定させて搬送する長尺用無人搬送台車を提供すること。
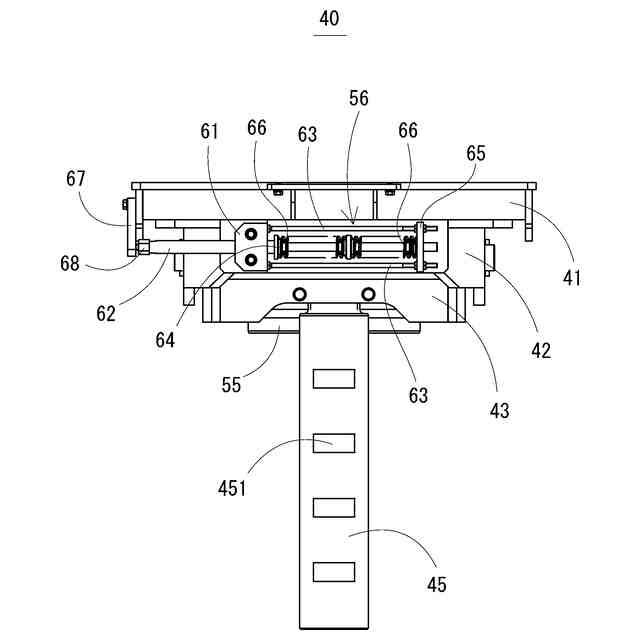
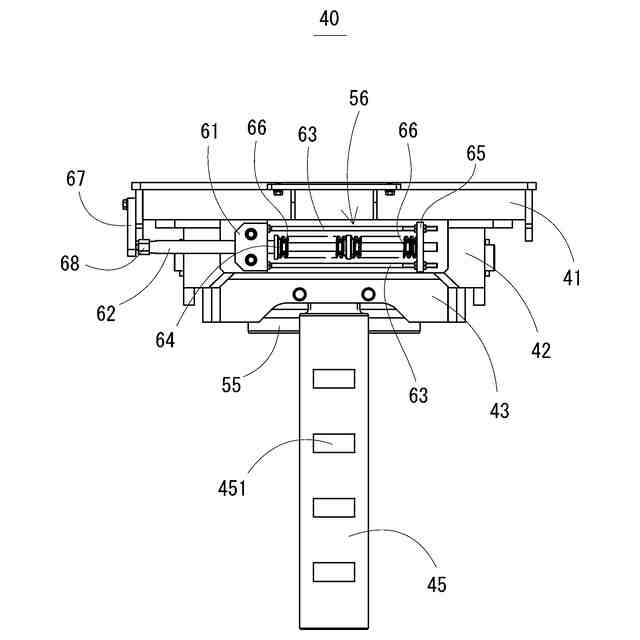
【解決手段】台車フレームの前後左右に各々の駆動モータによって独立して回転する一対の車輪を備えた走行装置と、前記走行装置によって支持された台車本体と、前記台車本体に対して縦軸を中心として回転することにより左右端が交互に前後するヨーイングテーブル41を備えた載置台40と、載置台40の回転角度を検出する回転角度センサと、前記回転角度センサの検出信号を基に前記走行装置に対する駆動制御を行う駆動制御装置と、を有し、載置台40には、ヨーイングテーブル41に対してその回転中心を挟んだ左右両側から回転を制限する変位部材62が当てられ、変位部材62にはそれぞれヨーイングテーブル41の回転に対して復帰バネ66の付勢力が作用するようにした、左右一対の原点復帰機構56が設けられた長尺用無人搬送台車。
【選択図】図8
特許請求の範囲
【請求項1】
長尺搬送対象物を複数台で支持して搬送する長尺用無人搬送台車であって、
矩形の台車フレームの前後左右に各々の駆動モータによって独立して回転する一対の車輪を備えた走行装置と、
前記走行装置によって支持された台車本体と、
前記台車本体に対して縦軸を中心として回転することにより左右端が交互に前後するヨーイングテーブルを備えた載置台と、
前記載置台の回転角度を検出する回転角度センサと、
前記回転角度センサの検出信号を基に前記走行装置に対する駆動制御を行う駆動制御装置と、
を有し、
前記載置台には、前記ヨーイングテーブルに対してその回転中心を挟んだ左右両側から回転を制限する変位部材が当てられ、前記変位部材にはそれぞれ前記ヨーイングテーブルの回転に対して復帰バネの付勢力が作用するようにした、左右一対の原点復帰機構が設けられた長尺用無人搬送台車。
続きを表示(約 620 文字)
【請求項2】
前記原点復帰機構は、前記変位部材が前記ヨーイングテーブルに対して先端が当てられた変位ロッドであり、前記変位ロッドに対して復帰バネの付勢力が作用するように組付けられた請求項1に記載の長尺用無人搬送台車。
【請求項3】
前記原点復帰機構は、前記変位ロッドの先端にボールローラが螺合されたものである請求項2に記載の長尺用無人搬送台車。
【請求項4】
前記原点復帰機構は、前記ヨーイングテーブルを回転支持する支持部側に固定されたホルダと、前記ホルダに対して摺動可能に保持された前記変位ロッドと、前記変位ロッドを挟んで前記ホルダに固定された2本のタイロッドと、前記タイロッドに対する位置を変えて固定可能なバネ力調整板と、前記変位ロッドに固定されたスプリング受と前記バネ力調整板との間に前記復帰バネとして組み込まれたコイルバネと、を有するものである請求項3に記載の長尺用無人搬送台車。
【請求項5】
前記載置台は、前記台車フレームに対して、幅方向の横軸を中心として前後端が上下に揺動するピッチングテーブルと、前記ピッチングテーブルに対して、前後方向の前後軸を中心として左右端が上下に揺動するローリングテーブルと、前記ローリングテーブルに対して、上下方向の縦軸を中心として左右端が前後する前記ヨーイングテーブルとが、上下に重なるようにして一体に構成された請求項1に記載の長尺用無人搬送台車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、鉄道車体などのような長尺搬送対象物の搭載を安定させて搬送する長尺用無人搬送台車に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
鉄道車両検修工場や製造工場あるいは建設現場などでは、鉄道車両の車体や鉄骨による柱部材など長尺なものの搬送が行われている。下記特許文献1は、そうした長尺搬送対象物を搬送するための長尺用無人搬送台車が開示されている。この長尺用無人搬送台車は、長尺な重量物である長尺搬送対象物を、2台の搬送台車によって前部と後部とを支えながら協調搬送するものである。2台の長尺用無人搬送台車は、独立2輪台車あるいは全方向移動台車などからなる走行台車である。マスタ側搬送台車は、移動指令部に送られる指令に従って移動のための駆動制御が行われ、搬送対象物を介してつながったスレーブ側搬送台車は、マスタ側搬送台車に協調した駆動制御が行われる。そして、協調搬送中の位置誤差は位置誤差吸収機構が作動するようになっている。
【先行技術文献】
【特許文献】
【0003】
特開2015-99524号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
長尺用無人搬送台車が走行する場所は、必ずしも平坦に整備されたところばかりではなく、鉄道車両検修工場などは段差や勾配などが存在する。そうした場所を2台の長尺用無人搬送台車で長尺搬送対象物を支えながら横移動する横行搬送(図10参照)は、互いの走行面が異なることによって協調制御であっても走行速度に影響が生じてしまう。そして、2台の長尺用無人搬送台車における相対的な位置関係にズレが生じてしまい、長尺搬送対象物が傾いてしまう。このことにより長尺搬送対象物に自重による応力が作用し、当該部分に変形や損傷を生じさせてしまうことなどが起こり得る。従って、長尺用無人搬送台車において長尺搬送対象物を安定して搭載することが望まれる。
【0005】
そこで、本発明は、かかる課題を解決すべく、長尺搬送対象物の搭載を安定させて搬送する長尺用無人搬送台車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る長尺用無人搬送台車は、長尺搬送対象物を複数台で支持して搬送する長尺用無人搬送台車であって、矩形の台車フレームの前後左右に各々の駆動モータによって独立して回転する一対の車輪を備えた走行装置と、前記走行装置によって支持された台車本体と、前記台車本体に対して縦軸を中心として回転することにより左右端が交互に前後するヨーイングテーブルを備えた載置台と、前記載置台の回転角度を検出する回転角度センサと、前記回転角度センサの検出信号を基に前記走行装置に対する駆動制御を行う駆動制御装置と、を有し、前記載置台には、前記ヨーイングテーブルに対してその回転中心を挟んだ左右両側から回転を制限する変位部材が当てられ、前記変位部材にはそれぞれ前記ヨーイングテーブルの回転に対して復帰バネの付勢力が作用するようにした、左右一対の原点復帰機構が設けられたものである。
【発明の効果】
【0007】
前記構成によれば、長尺搬送対象物を例えば前後の無人搬送台車の載置台に搭載して搬送する際、無人搬送台車同士に相対的な位置ズレが生じたとしてもヨーイングテーブルによって長尺搬送対象物の搭載を安定させて搬送することができ、回転角度センサの検出信号を基に走行装置に対する駆動制御を行うことにより車輪に対する回転および走行角度の調整により位置ズレの修正が可能である。そうした無人搬送台車の相対的な位置ズレの修正制御には長尺搬送対象物を搭載する前にヨーイングテーブルにおける原点出しが必須であるが、原点復帰機構によって正確な原点出しが可能であり、その原点出しが行われたヨーイングテーブルに長尺搬送対象物を搭載することができる。
【図面の簡単な説明】
【0008】
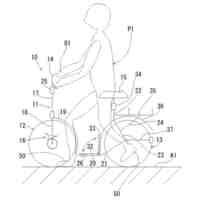
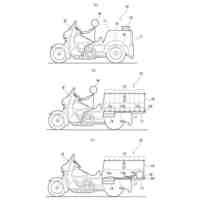
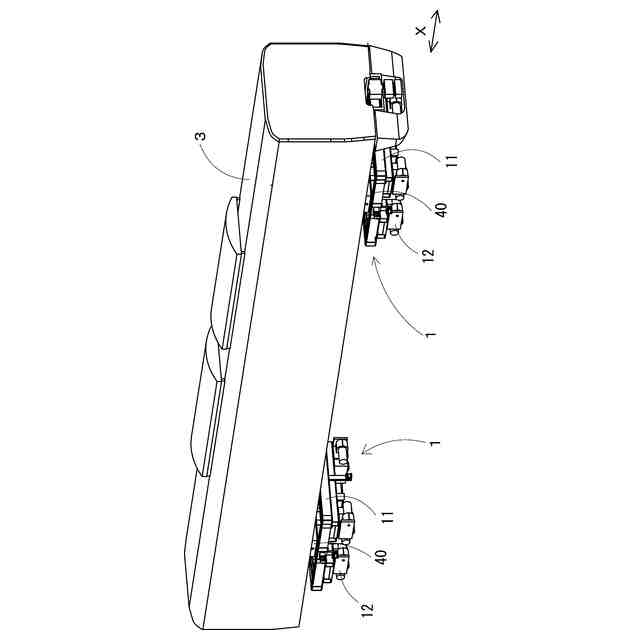
鉄道車体を2台の長尺用無人搬送台車に搭載した搬送時の状態を示した斜視図である。
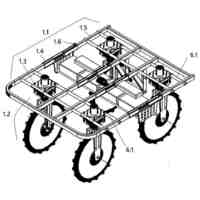
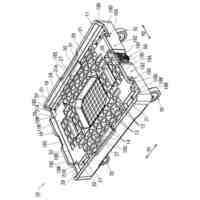
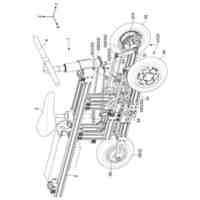
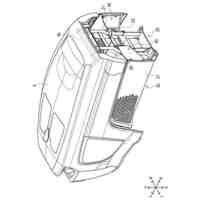
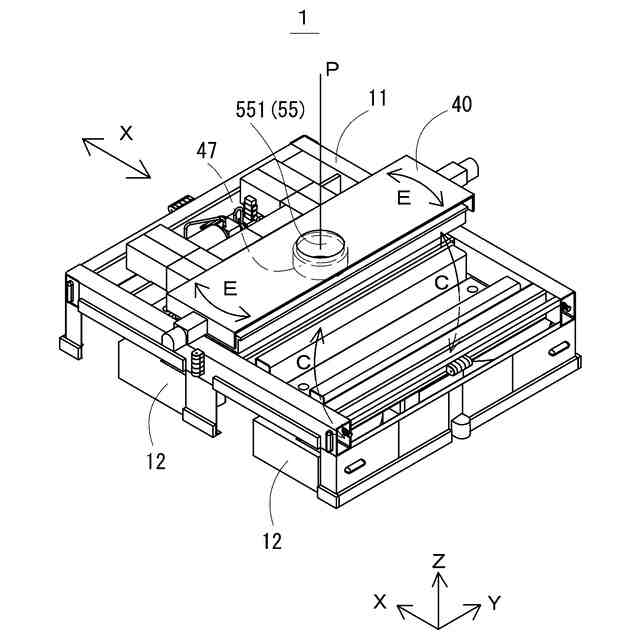
長尺用無人搬送台車を上方から示した斜視図である。
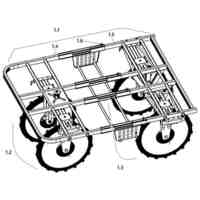
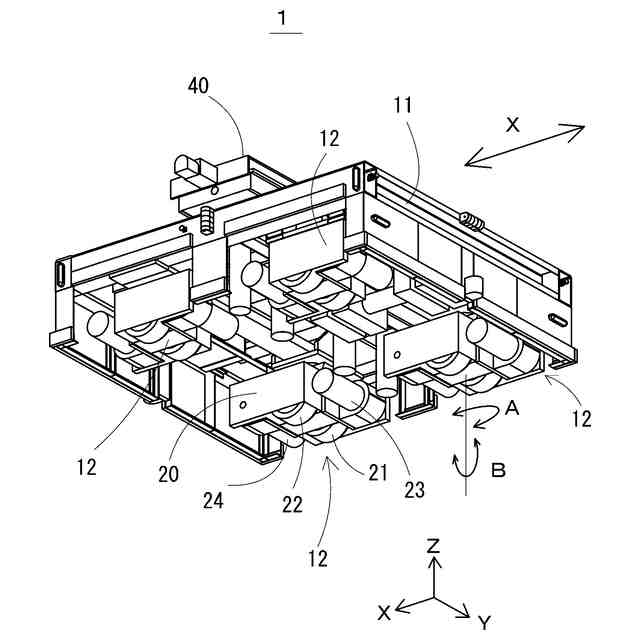
長尺用無人搬送台車を下方から示した斜視図である。
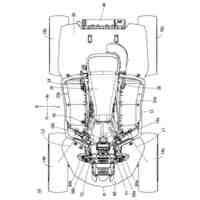
長尺用無人搬送台車を示した平面図である。
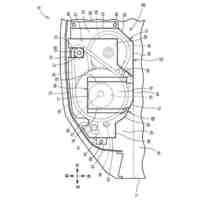
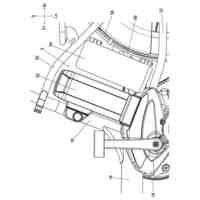
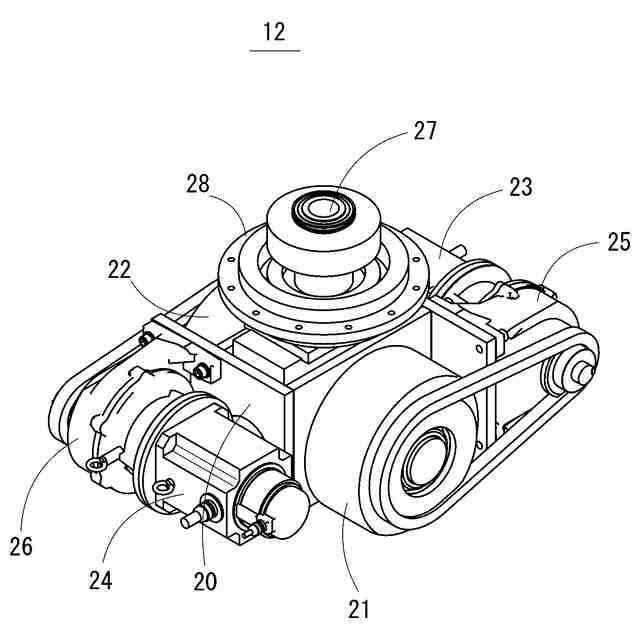
長尺用無人搬送台車の走行装置の外観斜視図である。
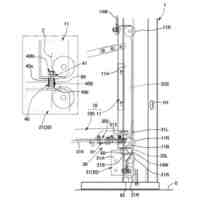
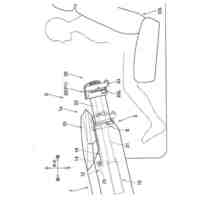
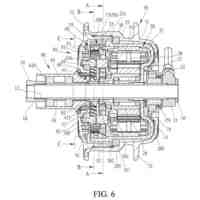
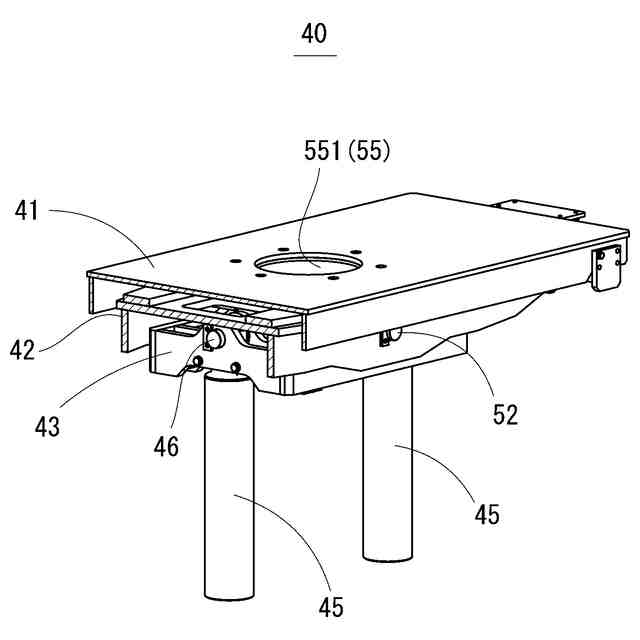
載置台を下側から示した斜視図である。
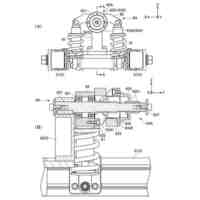
載置台を図6に示すM-M矢視における断面斜視図である。
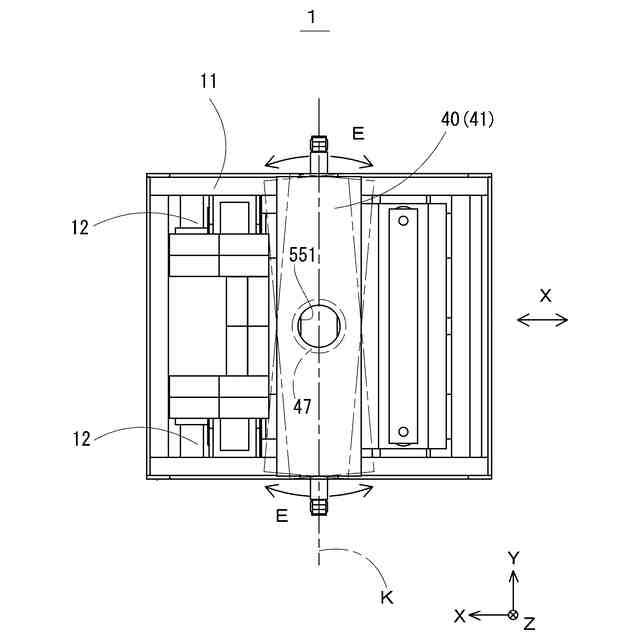
載置台を長手方向(Y軸方向)から見た側面図である。
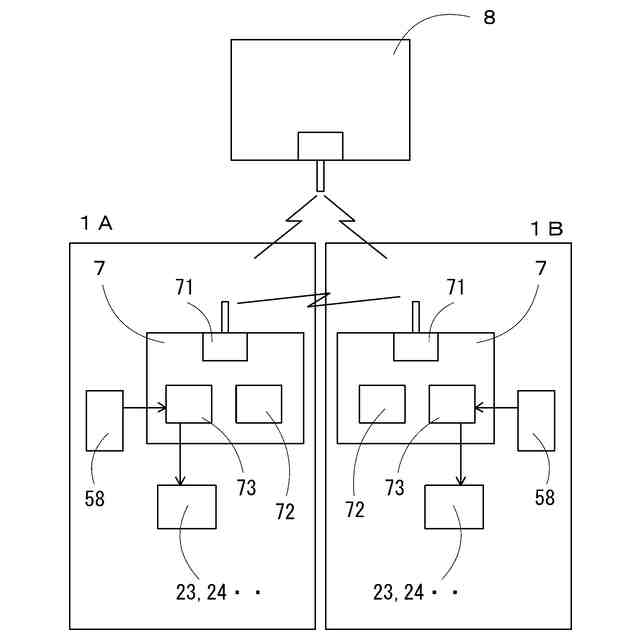
無人搬送台車制御システムの機能構成を簡易的に示したブロック図である。
鉄道車体が横向きになって横行する際、左右の無人搬送台車に相対的な位置ズレが生じた状況を示した図である。
【発明を実施するための形態】
【0009】
本発明に係る長尺用無人搬送台車の一実施形態について、図面を参照しながら以下に説明する。本実施形態では、長尺搬送対象物として鉄道車両の車体部(以下、鉄道車体と記す)を例に挙げ、特に鉄道車体に対する検査や修繕などを行う鉄道車両検修工場において、その鉄道車体を搬送するための長尺用無人搬送台車について説明する。図1は、鉄道車体を2台の長尺用無人搬送台車に搭載した搬送時の状態を示した斜視図である。この鉄道車体3は、通常運転時にはその前部および後部が台車に搭載されて鉄道レールを走行するものであるが、本実施形態の長尺用無人搬送台車(以下、単に「無人搬送台車」という)1は、そうした台車に換えて鉄道車体3を前後で支持し、当該鉄道車体を検査あるいは修繕するために鉄道車両検修工場内を無人搬送するものである。
【0010】
鉄道車体3は、鉄道車両検修工場において定期的に検査などが行われるが、その鉄道車両検修工場には鉄道レールが敷かれており、トラバーサなどの設備が整えられている。従来、その鉄道車両検修工場内を鉄道車体3が移動するには、鉄道車体3が仮台車に載せ替えられて鉄道レールに従った走行が行われていた。しかし、本実施形態の搬送では、鉄道レールに関係なく鉄道車両検修工場を自由に移動でききるようにした無人搬送台車1が使用される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カート
23日前
個人
走行装置
1か月前
個人
乗り物
2か月前
個人
電動走行車両
1か月前
個人
閂式ハンドル錠
1か月前
個人
電動モビリティ
4か月前
個人
折り畳み自転車
7か月前
個人
発音装置
4か月前
個人
自転車用傘捕捉具
9か月前
個人
自由方向乗車自転車
4か月前
個人
ルーフ付きトライク
6日前
個人
体重掛けリフト台車
8か月前
個人
アタッチメント
9か月前
個人
自転車用荷物台
8か月前
個人
キャンピングトライク
6か月前
個人
ステアリングの操向部材
11か月前
株式会社CPM
駐輪機
9か月前
個人
ステアリングの操向部材
6か月前
三甲株式会社
台車
11か月前
株式会社三五
リアサブフレーム
7か月前
株式会社豊田自動織機
産業車両
1か月前
三甲株式会社
台車
11か月前
個人
フロントフットブレーキ。
1か月前
ヤマハ発動機株式会社
車両
9か月前
ダイハツ工業株式会社
車両
10か月前
ヤマハ発動機株式会社
車両
9か月前
豊田鉄工株式会社
小型車両
20日前
豊田合成株式会社
操舵装置
9か月前
ヤマハ発動機株式会社
車両
9か月前
学校法人千葉工業大学
車両
7か月前
学校法人千葉工業大学
車両
7か月前
ヤマハ発動機株式会社
車両
9か月前
学校法人千葉工業大学
車両
7か月前
個人
ホイールハブ駆動構造
1か月前
株式会社クボタ
作業車
3か月前
ヤマハ発動機株式会社
自転車
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ