TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025111336
公報種別
公開特許公報(A)
公開日
2025-07-30
出願番号
2024005711
出願日
2024-01-17
発明の名称
電動アシスト自転車および電動アシスト自転車の変速比の判定方法
出願人
ミネベアミツミ株式会社
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
主分類
B62M
6/45 20100101AFI20250723BHJP(鉄道以外の路面車両)
要約
【課題】変速比の誤判定のリスクを低減するとともに、変速比を高精度に確定する電動アシスト自転車および電動アシスト自転車の変速比の判定方法の提供。
【解決手段】第1の変速比から第2の変速比に変更されてから、第2の変速比に対応するペダル(4)のアシストが開始されるまでの時間は、第3の変速比から第4の変速比に変更されてから、第4の変速比に対応するペダル(4)のアシストが開始されるまでの時間と異なる、電動アシスト自転車(1)。
【選択図】図4(a)
特許請求の範囲
【請求項1】
第1の変速比から第2の変速比に変更されてから、前記第2の変速比に対応するペダルのアシストが開始されるまでの時間は、第3の変速比から第4の変速比に変更されてから、前記第4の変速比に対応する前記ペダルのアシストが開始されるまでの時間と異なる、電動アシスト自転車。
続きを表示(約 1,900 文字)
【請求項2】
制御装置を備え、
停止した前記制御装置の起動から、変速比に対応するペダルのアシストが開始されるまでの時間は、変速比の変更から、変更後の変速比に対応する前記ペダルのアシストが開始されるまでの時間に対して大きい、
電動アシスト自転車。
【請求項3】
車輪と、
制御装置と、
減速機と、前記ペダルをアシストするモータと、を有する回転装置と、
前記車輪の回転数を検出するセンサと、
前記モータの回転数を検出するセンサと、
を備え、
N
w
を前記車輪の回転数[rpm]、N
m
を前記モータの回転数[rpm]、gr
MDU
を前記回転装置の減速比として、式(1)を定義し、
N
m
/(gr
MDU
・N
w
) 式(1)
前記制御装置は、前記変速比に対応する所定の範囲内に、式(1)の大きさが含まれるかを判定する、
請求項1に記載の電動アシスト自転車。
【請求項4】
車輪と、
減速機と、前記ペダルをアシストするモータと、を有する回転装置と、
前記車輪の回転数を検出するセンサと、
前記モータの回転数を検出するセンサと、
を備え、
N
w
を前記車輪の回転数[rpm]、N
m
を前記モータの回転数[rpm]、gr
MDU
を前記回転装置の減速比として、式(1)を定義し、
N
m
/(gr
MDU
・N
w
) 式(1)
前記制御装置は、前記変速比に対応する所定の範囲内に、式(1)の大きさが含まれるかを判定する、
請求項2に記載の電動アシスト自転車。
【請求項5】
前記変速比に対応する前記ペダルのアシストが開始されるまでの時間は、車輪の1回転にかかる時間以内である、
請求項1から4のいずれかに記載の電動アシスト自転車。
【請求項6】
前記制御装置は、
第1センサからの車輪の回転数を示す信号および第2センサからのモータの回転数を示す信号に基づいて、式(1)に従って回転数の比を計算し、
すべての変速比のうちの1つまたは複数の変速比に関して、前記回転数の比が所定の回数以上閾値範囲内にある場合、前記1つまたは複数の変速比を仮判定し、
一旦仮判定された変速比に関して、前記回転数の比が閾値範囲内になくなった場合、前記変速比を除外し、
仮判定された1つの変速比に隣接する2つの変速比がともに除外された場合、仮判定さ
れた1つの変速比を変速比として判定する、
請求項3または4に記載の電動アシスト自転車。
【請求項7】
所定の変速比に変更されてから第1の期間の経過前に、前記所定の変速比の候補を判定する第1ステップと、
前記第1の期間の経過後で第2の期間の経過前に、前記所定の変速比の候補から前記所定の変速比を判定する第2ステップと、
を有する、電動アシスト自転車の変速比の判定方法。
【請求項8】
前記電動アシスト自転車は、
車輪と、
制御装置と、
減速機と、ペダルをアシストするモータと、を有する回転装置と、
前記車輪の回転数を検出するセンサと、
前記モータの回転数を検出するセンサと、
を備え、
N
w
を前記車輪の回転数[rpm]、N
m
を前記モータの回転数[rpm]、gr
MDU
を前記回転装置の減速比として、式(1)を定義し、
N
m
/(gr
MDU
・N
w
) 式(1)
前記第1ステップにおいて、前記制御装置によって、複数の変速比に対応する数値範囲のうち、式(1)で算出された変速比を含む1つまたは複数の数値範囲が判定され、
前記1つまたは複数の数値範囲に対応する1つまたは複数の変速比が前記所定の変速比の候補である、
請求項7に記載の電動アシスト自転車の変速比の判定方法。
【請求項9】
前記第1の期間および前記第2の期間を含む期間は、車輪の1回転にかかる時間以内である、
請求項7または8に記載の電動アシスト自転車の変速比の判定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動アシスト自転車および電動アシスト自転車の変速比の判定方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、変速機とモータとを有しかつ変速機の変速比の変化に応じてモータの駆動回転数とペダルの駆動回転数との比が変化する電動アシスト自転車のアシスト比を適切に制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-241045号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
電動アシスト自転車の現在の変速比を判定するためには、モータの回転数および車輪の回転数を測定する必要がある。しかしながら、回転数センサの精度の問題から、「隣接する変速比のどちらが正しいか分からない」という状態が発生しうる。例えば、ギア3に設定されている場合でも、モータの回転数および車輪の回転数を測定した結果からは、ギア2とギア3のどちらに設定されているのかが分からない場合がある。この状態において、ギア2に設定されていると誤って判定すると、電動アシスト自転車が期待しない挙動をするおそれがある。
【0005】
そこで、本発明は、「隣接する変速比のどちらが正しいか分からない」という状態の場合、隣接する変速比の両方を候補と仮判定することにより誤判定のリスクを低減すること、および、変速比を高精度に確定することを課題の一例とする。
【課題を解決するための手段】
【0006】
本発明の一例である電動アシスト自転車では、第1の変速比から第2の変速比に変更されてから、前記第2の変速比に対応するペダルのアシストが開始されるまでの時間は、第3の変速比から第4の変速比に変更されてから、前記第4の変速比に対応する前記ペダルのアシストが開始されるまでの時間と異なる。
【0007】
本発明の一例である電動アシスト自転車は、制御装置を備え、
停止した前記制御装置の起動から、変速比に対応するペダルのアシストが開始されるまでの時間は、変速比の変更から、変更後の変速比に対応する前記ペダルのアシストが開始されるまでの時間に対して大きい。
【0008】
本発明の一例である電動アシスト自転車の変速比の判定方法は、
所定の変速比に変更されてから第1の期間の経過前に、前記所定の変速比の候補を判定する第1ステップと、
前記第1の期間の経過後で第2の期間の経過前に、前記所定の変速比の候補から前記所定の変速比を判定する第2ステップと、
を有する。
【図面の簡単な説明】
【0009】
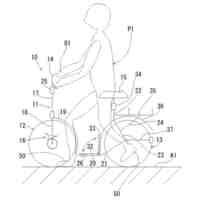
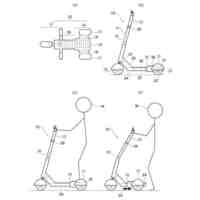
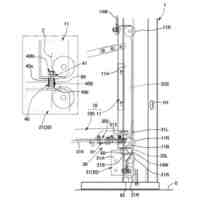
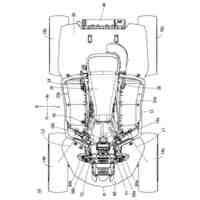
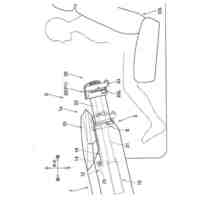
制御装置(モータ制御駆動装置)を備える電動アシスト自転車の側面図である。
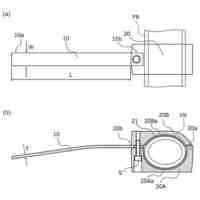
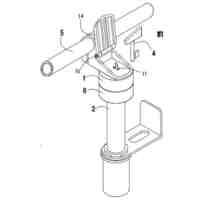
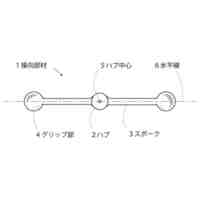
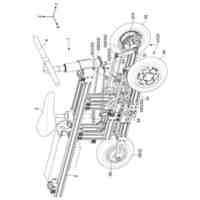
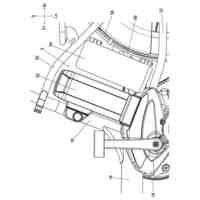
電動アシスト自転車の一部を示す図である。
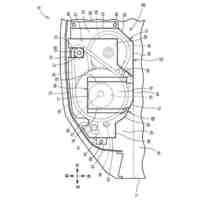
制御装置、第1センサ、第2センサおよびモータの構成を模式的に示すブロック図である。
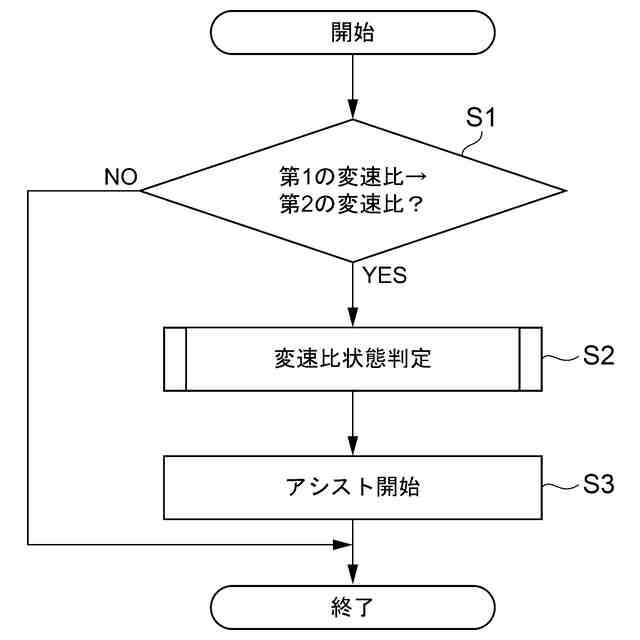
本発明における制御を説明するためのフローチャートである。
本発明における制御を説明するためのタイミング図である。
本発明におけるその他の制御を説明するためのタイミング図である。
本発明におけるその他の制御を説明するためのタイミング図である。
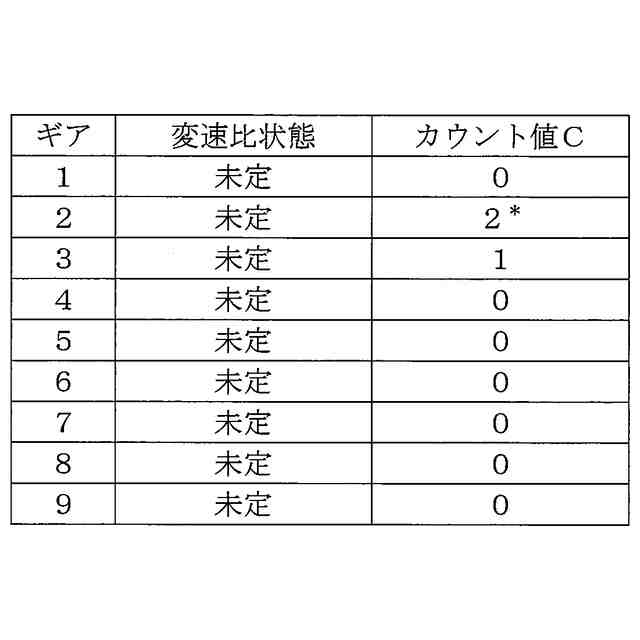
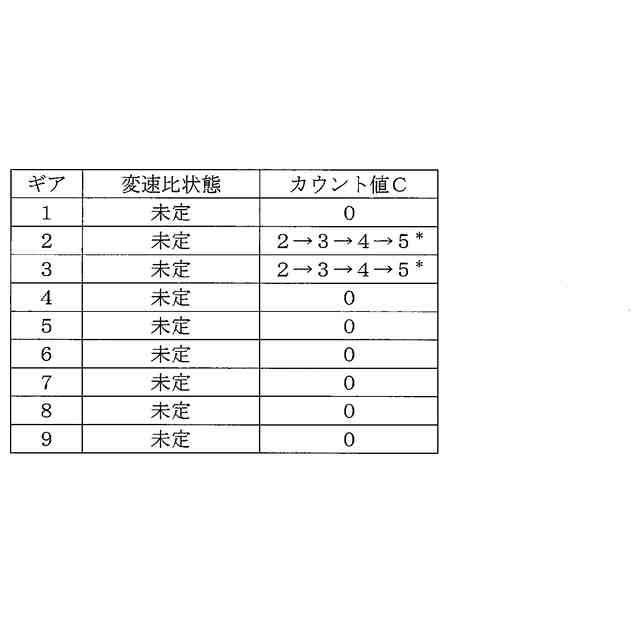
変速比状態判定処理を説明するためのフローチャートである。
電動アシスト自転車における、変速時の検出およびモータ制御を説明するためのシミュレーション図である。
図8(a)のうち、ギア9からギア8に変更され、図7に示す変速比状態判定処理を経てギア8に確定するまでの部分を拡大したシミュレーション図である。
図8(a)のうち、ギア2からギア1に変更され、図7に示す変速比状態判定処理を経てギア1に確定するまでの部分を拡大したシミュレーション図である。
【発明を実施するための形態】
【0010】
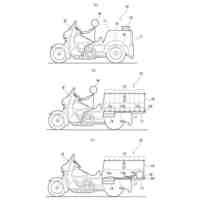
図1は、制御装置(モータ制御駆動装置)を備える電動アシスト自転車の側面図である。
電動アシスト自転車1は、フレームF、ハンドルH、サドルS、伝達体C、電池B、回転装置(MDU:モータドライブユニット)100、第1車輪(前輪)2、第2車輪(後輪)3およびペダル4を備える。運転者が電動アシスト自転車1のサドルSに座り、ペダル4を足で漕いで回転させると、必要に応じて回転装置100によるアシストを受けながら、伝達体Cを介して車輪(典型的には後輪3)に駆動力が伝達され、前方への走行が可能となる。伝達体Cは、チェーンであってもよく、ベルトであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カート
1か月前
個人
走行装置
1か月前
個人
電動走行車両
1か月前
個人
乗り物
3か月前
個人
電動モビリティ
5か月前
個人
折り畳み自転車
8か月前
個人
発音装置
5か月前
個人
閂式ハンドル錠
1か月前
個人
自転車用傘捕捉具
9か月前
個人
“zen-go.”
17日前
個人
ルーフ付きトライク
23日前
個人
自由方向乗車自転車
5か月前
個人
体重掛けリフト台車
8か月前
個人
自転車用荷物台
9か月前
個人
アタッチメント
9か月前
個人
キャンピングトライク
6か月前
株式会社CPM
駐輪機
9か月前
個人
ステアリングの操向部材
6か月前
株式会社豊田自動織機
産業車両
2か月前
三甲株式会社
台車
11か月前
三甲株式会社
台車
11か月前
株式会社三五
リアサブフレーム
8か月前
個人
フロントフットブレーキ。
2か月前
ヤマハ発動機株式会社
車両
10か月前
ヤマハ発動機株式会社
車両
10か月前
ダイハツ工業株式会社
車両
10か月前
学校法人千葉工業大学
車両
8か月前
学校法人千葉工業大学
車両
8か月前
学校法人千葉工業大学
車両
8か月前
個人
ホイールハブ駆動構造
2か月前
豊田鉄工株式会社
小型車両
1か月前
豊田合成株式会社
操舵装置
10か月前
ヤマハ発動機株式会社
車両
10か月前
ヤマハ発動機株式会社
車両
10か月前
ヤマハ発動機株式会社
自転車
2か月前
株式会社オカムラ
搬送用什器
5か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ