TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118880
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2025081822,2023558119
出願日
2025-05-15,2021-12-22
発明の名称
k空間と画像空間とを組み合わせて再構築するイメージング方法及び装置
出願人
浙江大学
,
ZHEJIANG UNIVERSITY
代理人
弁理士法人ATEN
主分類
A61B
5/055 20060101AFI20250805BHJP(医学または獣医学;衛生学)
要約
【課題】磁気共鳴画像の分野に属する、k空間と画像空間とを組み合わせて再構築するイメージング方法及び装置を提供する。
【解決手段】k空間パラレルイメージング方法によって測定オブジェクトが磁気共鳴パラメータの測定に必要なマルチフレームイメージングから取得した自動補正信号を持つアンダーサンプリング画像フレームを再構築し、次に、自動補正信号を持たない他のアンダーサンプリング画像フレームデータを画像空間において再構築する。本発明はアンダーサンプリングデータから正確なSENSE方法に必要な感度マップを生成し、追加の収集を行う必要がない。該方法は従来のGRAPPA方法とほぼ一致する画像を生成し、且つ明らかなアーチファクトを有しないが、速度が従来のGRAPPA方法の4倍以上である。自動補正の再構築方法とされて全サンプリングフレームを必要とせず、特に三次元(3D)マルチフレーム磁気共鳴画像の加速に適する。
【選択図】図8
特許請求の範囲
【請求項1】
マルチフレームイメージングにおけるアンダーサンプリング画像フレームの再構築に用いられるk空間と画像空間とを組み合わせて再構築するイメージング方法であって、
前記アンダーサンプリング画像フレームは自動補正信号を持つ第1アンダーサンプリング画像フレームと、自動補正信号を持たない且つ加速係数が2以上である第2アンダーサンプリング画像フレームとを含み、第1アンダーサンプリング画像フレームの加速係数が第2アンダーサンプリング画像フレームの加速係数以下であり、
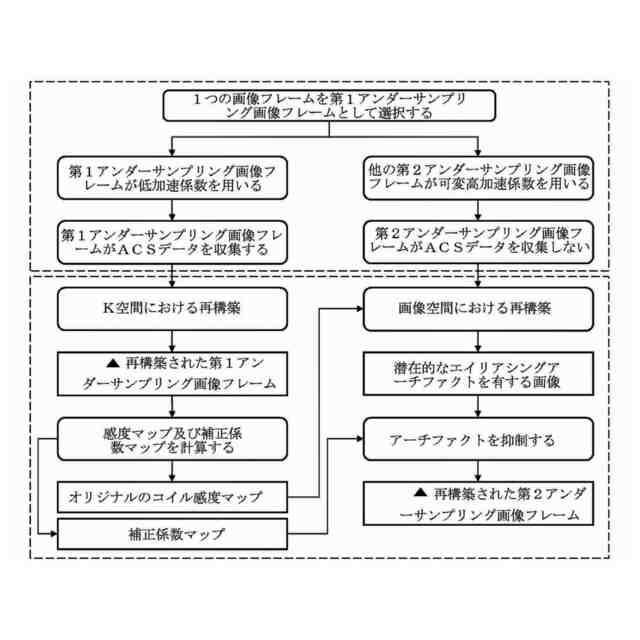
前記再構築する方法は、以下のステップS1~ステップS4を含み、
前記ステップS1では、第1アンダーサンプリング画像フレームをk空間における自動補正のパラレルイメージング方法により再構築して完全な画像フレームを補正フレームとして取得し、補正フレームのk空間データをフーリエ変換して各チャネルのコイル画像を取得し、すべてのチャネルのコイル画像を結合してチャネル結合画像を取得し、
前記ステップS2では、各チャネルのコイル画像を前記チャネル結合画像で割って各チャネルのコイル感度マップを取得し、前記チャネル結合画像から支持領域を識別し、且つ感度マップにおける支持領域に対して平滑化によるノイズ除去を行い、感度マップにおける非支持領域を外挿して、最適化された感度マップを取得し、
前記ステップS3では、最適化された感度マップによって前記補正フレームにおいて加速係数が1のSENSE再構築を行って、参照画像を生成するとともに、前記補正フレームに対して後ろ向きアンダーサンプリングを行って後ろ向きアンダーサンプリングの加速係数を前記第2アンダーサンプリング画像フレームの加速係数と同じにし、更にアンダーサンプリング後のデータに対してSENSE再構築を行って、潜在的なエイリアシングアーチファクトを有する後ろ向き再構築画像を生成し、参照画像及び後ろ向き再構築画像に基づいて補正係数マップを取得し、且つ補正係数マップにおける各位置の画素値を参照画像及び後ろ向き再構築画像における対応位置の画素値の商にし、
前記ステップS4では、第1アンダーサンプリング画像フレーム以外の残りの第2アンダーサンプリング画像フレームに対して前記最適化された感度マップによりSENSE再構築を行い、SENSE再構築後の画像を前記補正係数マップに乗じて、アーチファクトを抑制する完全な画像フレームを取得する
ことを特徴とするk空間と画像空間とを組み合わせて再構築するイメージング方法。
続きを表示(約 1,400 文字)
【請求項2】
前記ステップS1において、前記k空間における自動補正のパラレルイメージング方法はGRAPPA方法であり、コイルの重みを計算してアンダーサンプリング領域に応用することにより、完全な画像フレームを再構築して取得する
ことを特徴とする請求項1に記載のk空間と画像空間とを組み合わせて再構築するイメージング方法。
【請求項3】
前記GRAPPA方法はTikhonov正則化を用いるGRAPPAである
ことを特徴とする請求項2に記載のk空間と画像空間とを組み合わせて再構築するイメージング方法。
【請求項4】
前記第1アンダーサンプリング画像フレームと第2アンダーサンプリング画像フレームとはいずれも二次元画像であり、前記第1アンダーサンプリング画像フレームの加速係数が2であることが好ましく、前記第2アンダーサンプリング画像フレームの加速係数が2~4であることが好ましい
ことを特徴とする請求項1に記載のk空間と画像空間とを組み合わせて再構築するイメージング方法。
【請求項5】
前記第1アンダーサンプリング画像フレームと第2アンダーサンプリング画像フレームとはいずれも三次元画像であり、前記第1アンダーサンプリング画像フレームの加速係数が2×2であることが好ましく、前記第2アンダーサンプリング画像フレームの加速係数がN×Mであることが好ましく、2≦N≦4、2≦M≦4であり、且つ総加速係数が12以下である
ことを特徴とする請求項1に記載のk空間と画像空間とを組み合わせて再構築するイメージング方法。
【請求項6】
前記ステップS1において、平方根方法又は自己適応方法によりすべてのコイル画像を結合する
ことを特徴とする請求項1に記載のk空間と画像空間とを組み合わせて再構築するイメージング方法。
【請求項7】
前記ステップS2において、感度マップにおける支持領域に対してフィッティング方式で平滑化によるノイズ除去を行う
ことを特徴とする請求項1に記載のk空間と画像空間とを組み合わせて再構築するイメージング方法。
【請求項8】
前記ステップS3において、異常値を除去するように、前記補正係数マップをフィルタによりフィルタリングする必要がある
ことを特徴とする請求項1に記載のk空間と画像空間とを組み合わせて再構築するイメージング方法。
【請求項9】
前記ステップS4において、前記最適化された感度マップによりSENSE再構築を行うとき、カットオフ特異値正則化方法を用いる
ことを特徴とする請求項1に記載のk空間と画像空間とを組み合わせて再構築するイメージング方法。
【請求項10】
磁気共鳴イメージング装置であって、
磁気共鳴スキャナ及び制御ユニットを備え、前記制御ユニットにはコンピュータプログラムが記憶され、前記コンピュータプログラムが実行されたとき、請求項1~9のいずれか1項に記載のイメージング方法は、実施され、前記磁気共鳴スキャナは前記第1アンダーサンプリング画像フレーム及び第2アンダーサンプリング画像フレームデータを取得するためのものである
ことを特徴とする磁気共鳴イメージング装置。
発明の詳細な説明
【技術分野】
【0001】
本出願は、出願日が2021年4月8日であり、出願番号が202110379060.9である中国特許出願の優先権を請求しており、そのすべての内容は援用により本出願に組み込まれる。
続きを表示(約 3,300 文字)
【0002】
本発明は磁気共鳴画像の分野に属し、マルチフレーム画像データを必要とする磁気共鳴パラメータの測定に対して高速収集を実現することができる。
【背景技術】
【0003】
磁気共鳴画像(MRI)は核スピン密度、縦緩和時間(T1)、横緩和時間(T2)、見かけ拡散係数(ADC)、脳血流速度、磁化転移速度などを含む組織パラメータを測定するためのものであってもよい。これらのパラメータの信号源は生体内にある内因性化合物の核(例えば、水中の
1
H)であってもよく、外因性物質又はトレーサーであってもよい。組織のMRIパラメータの直接量子化によって神経、筋肉骨格、肝臓及び心筋のイメージングにおける更なる価値のある様々な病理的な臨床情報を提供することができる。
【0004】
これらのパラメータを測定するイメージング技術は緩和時間イメージング、拡散イメージング、灌流イメージング、機能磁気共鳴(fMRI)及び化学交換飽和転移(CEST)イメージングを含み、それらはほとんど同じイメージングオブジェクトに対してパルスシーケンスパラメータ変調を有するマルチフレーム画像データセットを収集する必要がある。これらの変調可能なパルスシーケンスパラメータはエコー時間(TE)、反転角度又は勾配強度などを含み、例えば、拡散イメージングは同じイメージングオブジェクトに対して異なる勾配磁場におけるデータを収集する必要がある。目標パラメータの推定はマルチフレーム画像データセットにおける信号変化を数学的モデルとフィッティングすることで実現され得る。複数回収集する必要があるため、走査時間が長く、これはその臨床での応用を制限する一方、より長い走査時間に起因して追加の運動を引き起こしやすく、このため、技術そのものが運動に比較的敏感である。従って、データ収集時間を短縮してイメージング過程を加速することは患者に利便性を提供するだけでなく、画像品質の向上にも役立つ。
【0005】
マルチフレームイメージングにおけるパラメータ測定を加速するために、中国国内外の研究者は既に多くの方法を提案しており、CEST技術を例とすると、Keyhole-CEST、SLAM、k-w ROSA、CS-CESTなどの方法がある。Keyhole-CESTは取得された低解像度の画像と高解像度の参照画像とを組み合わせて各回収集すべきデータを減少させるが、画像の高周波情報を犠牲にしてしまう。SLAM方法は偵察走査から取得された先験位置決め知識によって直接に任意の形状の関心領域から領域CEST測定値を生成し、従来のシングルボクセル及びマルチボクセル方法よりも遥かに高い信号対雑音比効率を有するが、領域内部の組織の異質性情報が紛失してしまう。モデルに基づく方法のうちのk-w ROSAはサブ空間に基づくZスペクトル信号を分解して測定モデルに結合することにより、直接に完全又は不完全な測定から関心のある非対称なZスペクトルを推定できるが、その加速能力が限られてしまう。圧縮センシングに基づくCS-CEST方法は画像の変換領域におけるスパース性により加速するが、実際の応用においてまだ完全なランダムアンダーサンプリングを実現していない。
【0006】
パラレルイメージング方法はその実用性及びロバスト性により臨床的に広く使用されている。現在、基本的にはGRAPPAを代表とする自動補正のk空間方法及びSENSEを代表とする顕在的なコイル感度に基づく画像空間方法の2種類に分けられる。GRAPPAは自動補正のk空間パラレルイメージングアルゴリズムであり、マルチチャネルデータの線形組み合わせにより欠損点をフィッティングする。GRAPPAの補正方程式は以下の式1に示され、
JPEG
2025118880000002.jpg
12
170
[1]
ここで、Aが自動補正信号(ACS)により生成されるソースデータ行列を示し、yが目標データベクトルを示し、wがフィッティングしようとする重みを示す。過去の研究によって、加速係数がより低い場合、GRAPPAは正確な画像を生成することができ、且つより高いロバスト性を有することが明らかになった。マルチフレームデータを必要とするパラメータの測定の場合には、複数フレームの画像を収集する必要があるため、従来のGRAPPA方法は各画像フレームがいずれもACSを収集する必要があり、これは加速効果を大幅に低減してしまい、1つのみのACSを収集して、これにより算出された重み値をすべてのアンダーサンプリングフレームに応用すれば、未知のアーチファクトを導入してしまう。一方、加速係数が高い場合には、GRAPPAはより遠いk空間収集データから欠損データをフィッティングするしかなく、これは誤差を増加させてしまう。GRAPPAの原理はその加速能力を制限し、実際の二次元(2D)イメージングが一般的に2倍加速を用い、三次元(3D)イメージングが一般的に2×2倍加速を用いる。
【0007】
SENSEは並列再構築を画像空間の線形方程式の反転問題として見なし、感度マップが完全に正確である場合、SENSEは最小二乗意味における最適解を求めることができる。しかしながら、実際には、正確な感度マップが取得されにくく、且つ感度マップにおける微小な誤差に起因して再構築画像における強いラップアラウンドアーチファクトを引き起こす恐れがある。最近、マルチフレーム画像データの収集及びパラメータの測定を加速するために、可変加速感度コーディング(vSENSE)方法が提案されている。マルチフレームイメージングにおいて、異なるフレームの画像は同じイメージングオブジェクトから取得されたものであり、理論的に同じコイル感度を有する。この仮定を基に、vSENSE方法は全サンプリングする又はより低い倍数でアンダーサンプリングする1つの画像フレームから調整された感度マップを取得し、次により高い加速係数でアンダーサンプリングする別の画像フレームを再構築する。vSENSEはより高い加速能力を有するが、3つの明らかな欠点がある。第1として、自動補正方法ではなく、追加の参照走査から初期感度マップを取得すると、非一致性を引き起こす恐れがあり、第2として、最新の3D vSENSE 方法において、全サンプリング画像が取得できないため、2倍加速するSENSE画像フレームが正確なものとして見なされ、その再構築された画像が依然として潜在的なアーチファクトを有し、第3として、3D vSENSE方法における最も高い加速倍数が8であり、且つ既により多くのアーチファクトが現れており、その加速効果が依然として制限されてしまう。
【0008】
従って、マルチフレームイメージングを必要とするMRパラメータの測定分野において、自動補正再構築が可能であるとともに、一層高い加速係数が許容されて高いロバスト性を有する方法を提供することは、極めて重要な意味を有する。
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明の目的は、従来技術におけるマルチフレームイメージング再構築において自動補正が不可能で、且つ再構築画像が潜在的なアーチファクトを有し、加速効果が大幅に制限されているといった問題を解決し、且つk空間と画像空間とを組み合わせて再構築する高速イメージング方法(英語の名称はjoint K-space and Image-space Parallel Imagingであり、以下にKIPI方法と略称されてもよい)及び装置を提供することにあり、高度にアンダーサンプリングされたk空間データから正確な画像を回復することができる。
【課題を解決するための手段】
【0010】
本発明が用いる具体的な技術案は以下のとおりである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
浙江大学
水平軸方向角振動装置
10か月前
浙江大学
可変粘性流れ抵抗構造
7か月前
浙江大学
超狭線幅レーザ発生装置
7か月前
浙江大学
斜面土壌体浸透係数モニタリング方法とシステム
26日前
浙江大学
SNP分子で標識されたHu羊純血種の評価方法
3か月前
浙江大学
超臨界ウェーハ洗浄/乾燥媒体回収方法及びシステム
1か月前
浙江大学
氷点下の温度に基づく多孔質炭素電極の凍結転写方法
2か月前
浙江大学
降雨型地滑りモニタリング・早期警報方法とシステム
23日前
浙江大学
ベース歪み発生装置およびベース歪み感度計測システム
8か月前
浙江大学
地下水水位標高の測定方法、貯水量測定システム及び応用
3か月前
浙江大学
マルチインバータ駆動交流モータの給電における高調波の制御装置
3か月前
浙江大学濱江研究院
高強度のシルクフィブロインヒドロゲル人工腱/人工靭帯の製造方法
4か月前
浙江大学
個人化の下肢リハビリテーション歩行パターンの生成装置及び制御方法
10か月前
浙江大学
下肢リハビリテーション訓練用の外骨格の歩行パラメータの最適化方法
9か月前
浙江大学
高鉄含有量の非晶質ナノ結晶軟磁性合金を調製するための過冷却凝固法
10か月前
浙江大学
複数の変数を同期的にモニタリングする地滑りモデル試験方法及び装置
6か月前
浙江大学
4Dプリントに基づく迷路状インターロックスマート構造及びそのロック方法
7か月前
浙江大学
全周回転型非接触電力伝送コネクタ装置及びこれに基づく電気エネルギー伝送方法
1か月前
杭州師範大学
水質を改善するための人文生態浄化システムおよび方法
3か月前
浙江大学
マルチノズルアレイによって勾配孔隙マクロポーラスゼラチンを3D印刷する装置及び方法
3か月前
浙江大学嘉興研究院
メタノール改質と高効率な膜分離との連結に基づくコンパクト型船舶用炭素回収のシステム、方法及び応用
7か月前
浙江大学
k空間と画像空間とを組み合わせて再構築するイメージング方法及び装置
11日前
湖北万潤新能源科技股フン有限公司
ナトリウム電池用正極材料及びその製造方法
10か月前
個人
健康器具
6か月前
個人
短下肢装具
1か月前
個人
鼾防止用具
6か月前
個人
脈波測定方法
6か月前
個人
洗井間専家。
4か月前
個人
前腕誘導装置
1か月前
個人
嚥下鍛錬装置
1か月前
個人
脈波測定方法
6か月前
個人
白内障治療法
5か月前
個人
ホバーアイロン
4か月前
個人
矯正椅子
2か月前
個人
バッグ式オムツ
2か月前
個人
歯の修復用材料
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ