TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125321
公報種別
公開特許公報(A)
公開日
2025-08-27
出願番号
2024021296
出願日
2024-02-15
発明の名称
モータ制御装置、装着ヘッド及びモータ制御装置の制御方法
出願人
株式会社FUJI
代理人
弁理士法人ネクスト
,
個人
,
個人
主分類
H02P
8/20 20060101AFI20250820BHJP(電力の発電,変換,配電)
要約
【課題】ステッピングモータで移動させる接触部材をストッパに接触させる場合に、適切な制御を行うことができるモータ制御装置、装着ヘッド及びモータ制御装置の制御方法を提供すること。
【解決手段】本開示のモータ制御装置は、ステッピングモータと、ステッピングモータの回転に応じて移動する接触部材と、接触部材と接触し接触部材の移動を規制するストッパと、パルス信号に基づいてステッピングモータを回転駆動するドライバ回路と、接触部材がストッパに接触していない非接触状態において、第1パルス周波数のパルス信号をドライバ回路に出力してドライバ回路を制御し、接触部材がストッパに接触している接触状態において、第1パルス周波数とは異なる周波数である第2パルス周波数のパルス信号をドライバ回路に出力してドライバ回路を制御する制御装置と、を備える。
【選択図】図10
特許請求の範囲
【請求項1】
ステッピングモータと、
前記ステッピングモータの回転に応じて移動する接触部材と、
前記接触部材と接触し前記接触部材の移動を規制するストッパと、
パルス信号に基づいて前記ステッピングモータを回転駆動するドライバ回路と、
前記接触部材が前記ストッパに接触していない非接触状態において、第1パルス周波数の前記パルス信号を前記ドライバ回路に出力して前記ドライバ回路を制御し、前記接触部材が前記ストッパに接触している接触状態において、前記第1パルス周波数とは異なる周波数である第2パルス周波数の前記パルス信号を前記ドライバ回路に出力して前記ドライバ回路を制御する制御装置と、
を備えるモータ制御装置。
続きを表示(約 2,400 文字)
【請求項2】
前記第1パルス周波数は、
非接触状態において前記接触部材に発生する振動の振動方向に合わせた周波数が設定されており、前記ステッピングモータの回転に応じて前記接触部材を移動させたい進行方向とは逆方向に前記接触部材が振動しているタイミング、又は前記ステッピングモータの回転に応じて前記接触部材を移動させたい進行方向から逆方向に向かって振動方向が変化するタイミングのうち、一方のタイミングでパルスが切り替わる周波数である、請求項1に記載のモータ制御装置。
【請求項3】
前記第2パルス周波数は、
接触状態において前記接触部材に発生する振動の振動方向に合わせた周波数が設定されており、前記ステッピングモータの回転に応じて前記接触部材を移動させたい進行方向に前記接触部材が振動しているタイミング、又は前記ステッピングモータの回転に応じて前記接触部材を移動させたい進行方向とは逆方向から進行方向に向かって振動方向が変化するタイミングのうち、一方のタイミングでパルスが切り替わる周波数である、請求項1又は請求項2に記載のモータ制御装置。
【請求項4】
前記第2パルス周波数は、
前記第1パルス周波数に比べて高い周波数である、請求項1又は請求項2に記載のモータ制御装置。
【請求項5】
前記接触部材は、
前記ステッピングモータの出力軸に取り付けられ、前記出力軸とともに回転し、
前記ストッパは、
前記接触部材の回転方向への移動を規制する、請求項1又は請求項2に記載のモータ制御装置。
【請求項6】
前記制御装置は、
前記第1パルス周波数の前記パルス信号で前記ドライバ回路を制御し、前記ストッパに向かって前記接触部材を移動させる第1回転制御と、
前記第1回転制御を実行し前記接触部材が前記ストッパに接触した後、前記第2パルス周波数の前記パルス信号で前記ドライバ回路を制御し、前記接触部材を前記ストッパ側へ移動させる第2回転制御と、
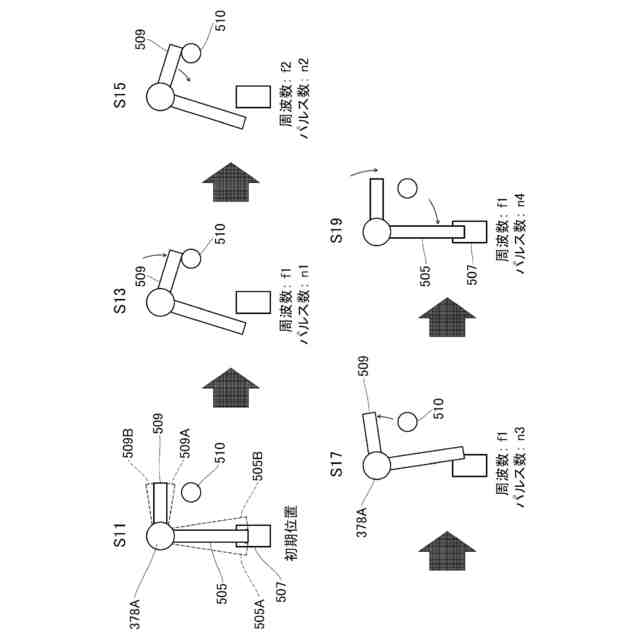
前記第2回転制御を実行した後、前記ステッピングモータの回転方向を切り替え、前記接触部材を前記ストッパから離れる方向へ移動させ、且つ、前記第1パルス周波数の前記パルス信号で所定の第3制御用パルス数だけ前記ドライバ回路を制御して前記接触部材を移動させる第3回転制御と、
前記第3回転制御を実行した後、前記ステッピングモータの回転方向を切り替え、前記接触部材を前記ストッパに近づく方向へ移動させ、且つ、前記第1パルス周波数の前記パルス信号で所定の第4制御用パルス数だけ前記ドライバ回路を制御して前記接触部材を移動させ、前記ステッピングモータの回転位置を所定の回転位置に合わせる第4回転制御と、
を実行する、請求項1又は請求項2に記載のモータ制御装置。
【請求項7】
前記ステッピングモータの出力軸に取り付けられ前記出力軸とともに回転する被検出部材と、
回転方向において前記被検出部材が所定の回転位置に配置された場合に、前記被検出部材を検出するセンサと、
をさらに備え、
前記制御装置は、
前記第4回転制御を実行した後、前記被検出部材を前記センサで検出できるか否かを判断する、請求項6に記載のモータ制御装置。
【請求項8】
前記制御装置は、
前記第1回転制御において、前記第1パルス周波数の前記パルス信号で所定の第1制御用パルス数だけ前記ドライバ回路を制御した後、前記第2回転制御を開始し、
前記第1制御用パルス数は、
予め設定された原点位置から前記ストッパに接触する位置まで前記第1パルス周波数で前記接触部材を移動させるのに必要なパルス数である、請求項6に記載のモータ制御装置。
【請求項9】
ステッピングモータと、
前記ステッピングモータの回転に応じて移動する接触部材と、
前記接触部材と接触し前記接触部材の移動を規制するストッパと、
パルス信号に基づいて前記ステッピングモータを回転駆動するドライバ回路と、
前記接触部材が前記ストッパに接触していない非接触状態において、第1パルス周波数の前記パルス信号を前記ドライバ回路に出力して前記ドライバ回路を制御し、前記接触部材が前記ストッパに接触している接触状態において、前記第1パルス周波数とは異なる周波数である第2パルス周波数の前記パルス信号を前記ドライバ回路に出力して前記ドライバ回路を制御する制御装置と、
を備え
前記制御装置は、
前記ストッパに向かって前記接触部材を移動させる接触制御と、
前記接触制御を実行し前記接触部材が前記ストッパに接触した後、前記ステッピングモータの回転方向を切り替え、前記接触部材を前記ストッパから離れる方向へ移動させ、所定のパルス数だけ前記ドライバ回路を制御して前記接触部材を移動させる離間制御と、
前記離間制御を実行した後、前記ステッピングモータの回転方向を切り替え、前記接触部材を前記ストッパに近づく方向へ前記ドライバ回路を制御して移動させ、前記ステッピングモータの回転位置を所定の回転位置に合わせる調整制御と、
を実行する、モータ制御装置。
【請求項10】
請求項1又は請求項2に記載のモータ制御装置と、
負圧を供給されることで部品を吸着し、負圧の供給が解除されることで前記部品の吸着を解除し前記部品を基板に装着する吸着ノズルと、
前記吸着ノズルに負圧を供給するか否かを切り替える切換弁と、
前記モータ制御装置の前記ステッピングモータの回転に応じて移動し、前記切換弁を切り替える切換部材と、
を備える装着ヘッド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ステッピングモータの回転制御に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、ステッピングモータを駆動源とする装置が種々提案されている。下記特許文献1には、車両の空調に用いる冷凍サイクル装置の弁を、ステッピングモータで駆動するモータ制御装置について記載されている。モータ制御装置は、ステッピングモータで駆動する軸部を、軸部の可動域の端部に突き当てて原点位置を更新するイニシャライズ処理を実行している。
【先行技術文献】
【特許文献】
【0003】
特開2019-221021号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した特許文献1のように、ステッピングモータで移動させる部材を、移動を規制するストッパに接触させて原点位置の更新等をする場合、移動させる部材がストッパに接触することで部材の振動の態様が変化する。その結果、部材の振動が増幅する虞があった。
【0005】
本開示は、そのような実情に鑑みてなされたものであり、ステッピングモータで移動させる接触部材をストッパに接触させる場合に、適切な制御を行うことができるモータ制御装置、装着ヘッド及びモータ制御装置の制御方法を提供することを課題とする。
【課題を解決するための手段】
【0006】
本明細書は、ステッピングモータと、前記ステッピングモータの回転に応じて移動する接触部材と、前記接触部材と接触し前記接触部材の移動を規制するストッパと、パルス信号に基づいて前記ステッピングモータを回転駆動するドライバ回路と、前記接触部材が前記ストッパに接触していない非接触状態において、第1パルス周波数の前記パルス信号を前記ドライバ回路に出力して前記ドライバ回路を制御し、前記接触部材が前記ストッパに接触している接触状態において、前記第1パルス周波数とは異なる周波数である第2パルス周波数の前記パルス信号を前記ドライバ回路に出力して前記ドライバ回路を制御する制御装置と、を備えるモータ制御装置を開示する。
【0007】
また、本明細書に開示される内容は、モータ制御装置としての実施に限らず、モータ制御装置を備える装着ヘッド、モータ制御装置を制御する制御方法として実施しても極めて有益である。
【発明の効果】
【0008】
接触部材がストッパに接触すると振動の態様が変化するため、接触状態と非接触状態とで、適切なパルス周波数が異なってくる。本開示によれば、非接触状態では第1パルス周波数のパルス信号を用いてドライバ回路を制御し、接触状態では第1パルス周波数とは異なる第2パルス周波数のパルス信号を用いてドライバ回路を制御する。これにより、非接触状態の振動態様に合わせた第1パルス周波数と、接触状態の振動態様に合わせた第2パルス周波を用いることで、適切な制御を行うことができる。
【図面の簡単な説明】
【0009】
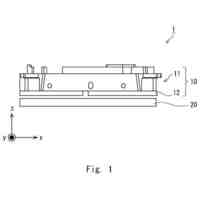
本実施形態の装着モジュールを複数備えた電子回路部品装着ラインの一部を示す斜視図。
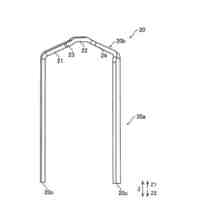
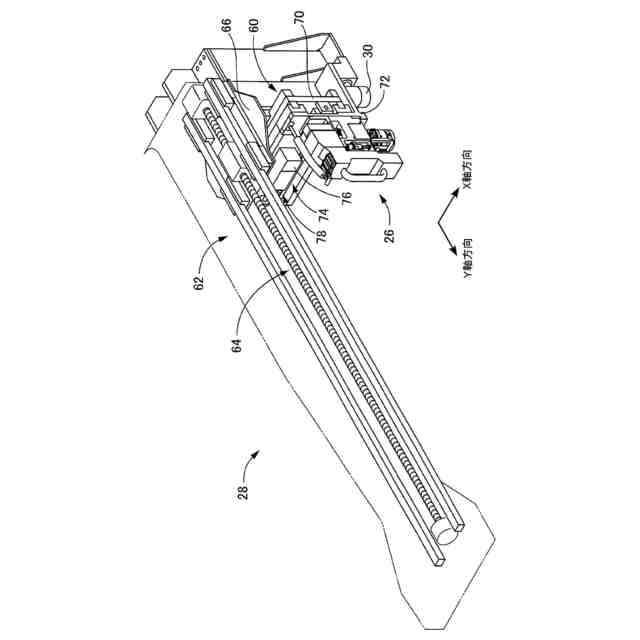
装着モジュールのロータリ型装着ヘッドと装着ヘッド移動装置とを示す斜視図。
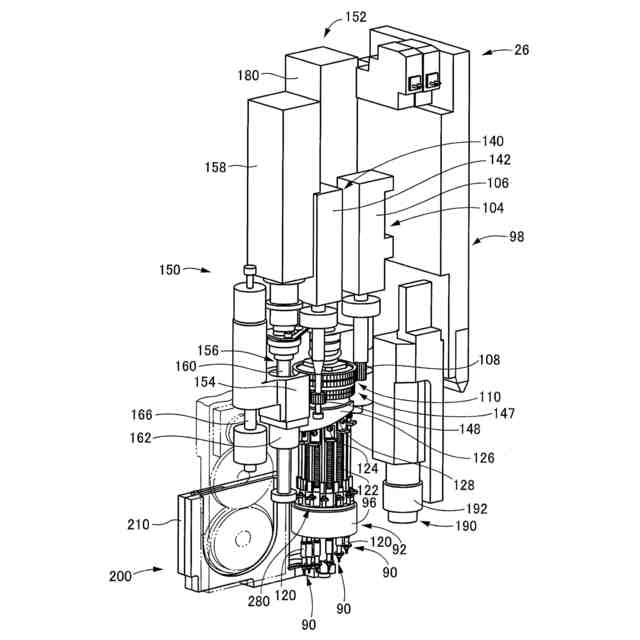
装着ヘッドを示す斜視図。
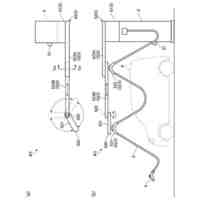
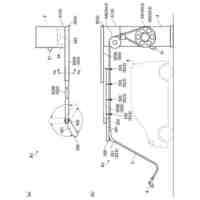
装着ヘッドの部品装着位置近傍部分を示す斜視図。
装着ヘッドの部品受取位置近傍部分を示す斜視図。
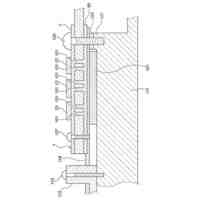
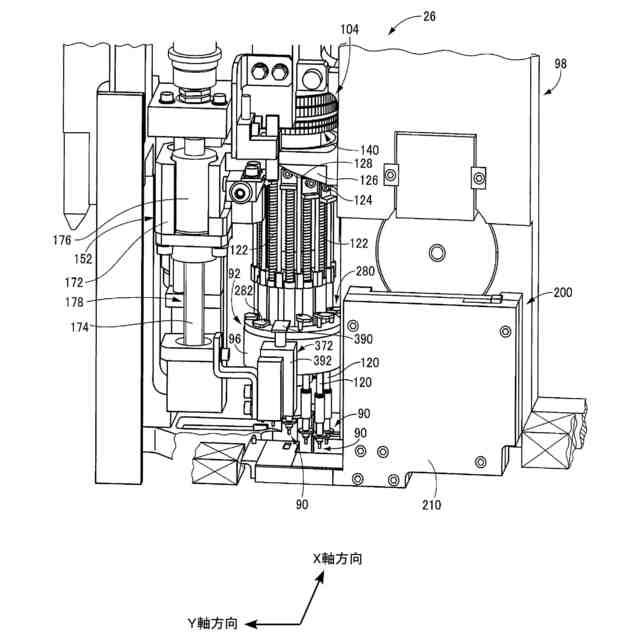
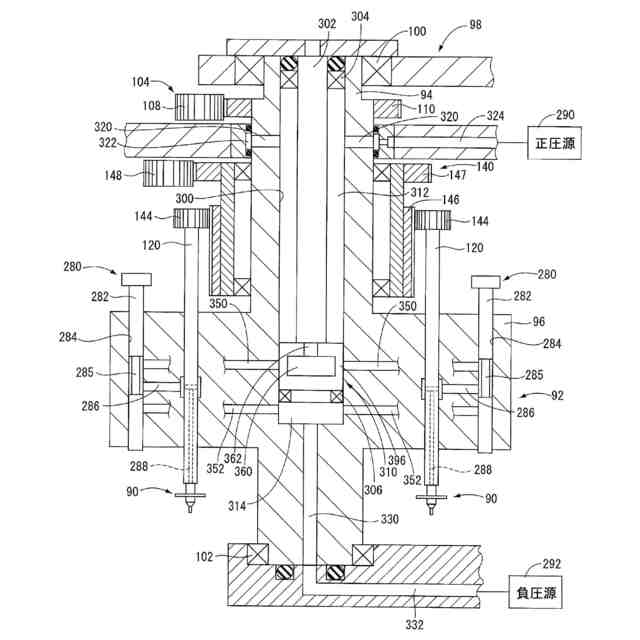
装着ヘッドを概略的に示す側面断面図。
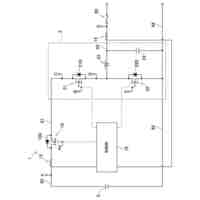
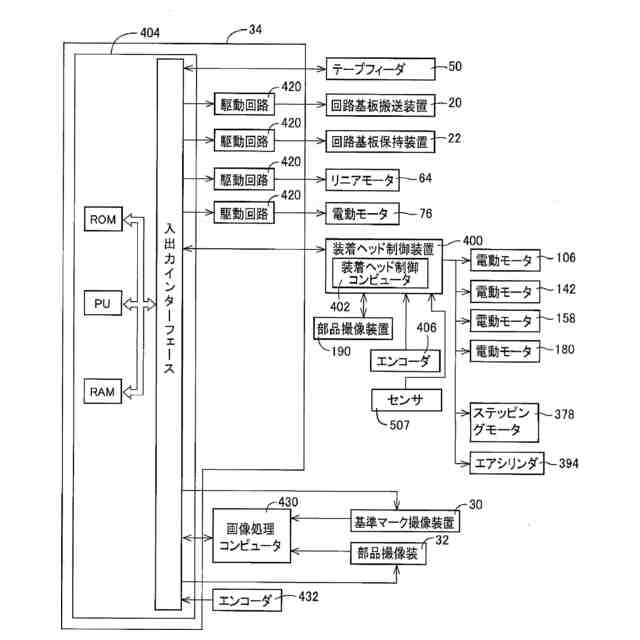
装着モジュールの制御装置等を概念的に示すブロック図。
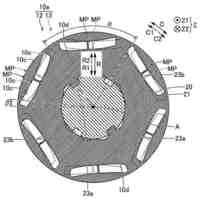
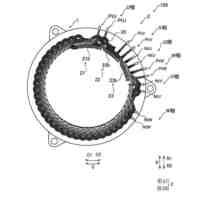
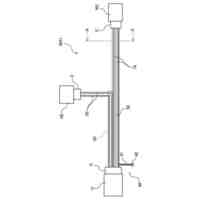
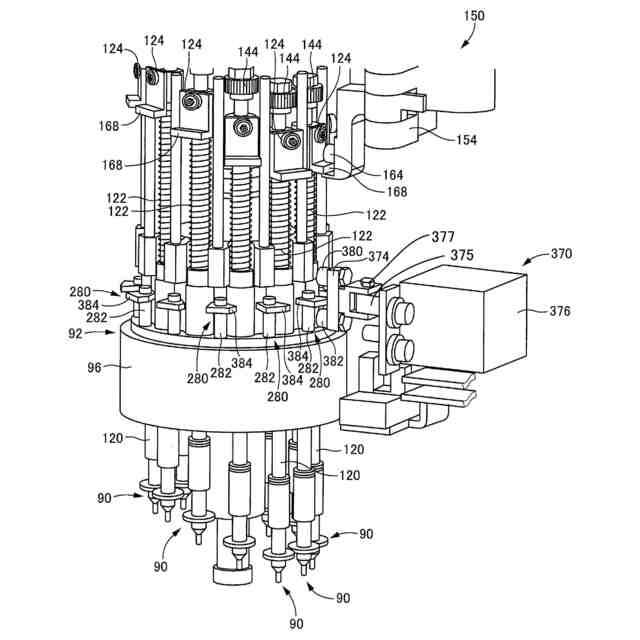
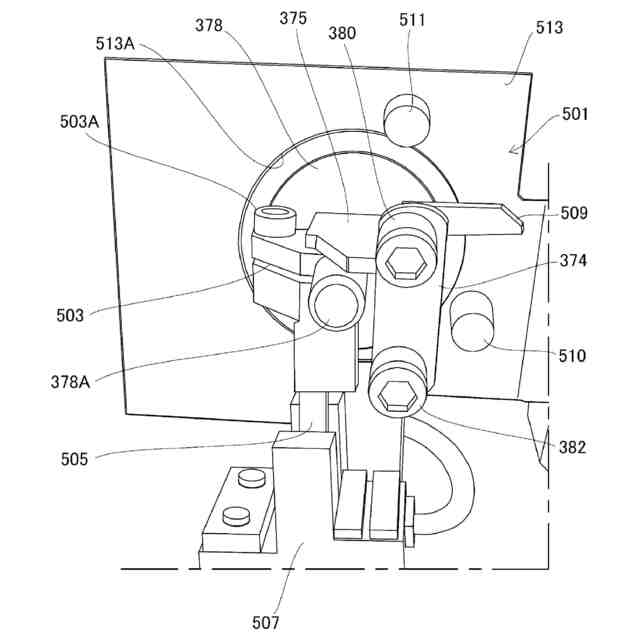
ステッピングモータの出力部分に設けられた復帰装置を示す斜視図。
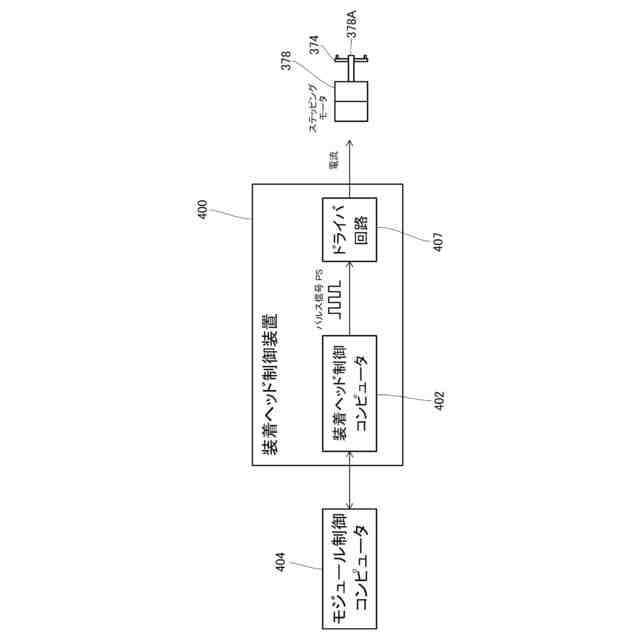
モジュール制御コンピュータ、装着ヘッド制御装置、ステッピングモータの制御の構成を示す図。
原点復帰動作を説明するための模式図。
接触部材が第1ストッパに接触する前後の被検出部材に発生する振動の変位を示すグラフ。
第1パルス周波数の切り替えタイミングを説明するためのグラフ。
【発明を実施するための形態】
【0010】
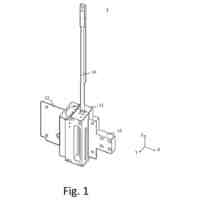
以下、本開示に係るモータ制御装置を実施するための一実施形態を、図を参照しつつ説明する。図1は、本実施形態のモータ制御装置を備える装着モジュール10の斜視図を示している。図1に示す例では、2台の装着モジュール10が、一つのベース12上に、互いに隣接して1列に配列され、装着ラインを構成している。装着モジュール10として、例えば、特開2004-104075号公報に記載された構成を採用できる。このため、以下の説明では、装着モジュール10の説明において上記公報の構成を採用できる部分については、その説明を適宜省略する。また、以下の説明において、電子回路部品を部品と略称する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社FUJI
工作機械
6日前
株式会社FUJI
部品実装機
9日前
株式会社FUJI
造形装置およびディスペンサヘッドの制御方法
2日前
株式会社FUJI
アラーム情報表示装置、及びアラーム情報表示システム
9日前
株式会社FUJI
サイクルタイム表示装置、及びサイクルタイム表示システム
9日前
株式会社FUJI
対基板作業機、および雄型コネクタと雌型コネクタとの接続維持方法
2日前
個人
単極モータ
2日前
株式会社アイシン
ロータ
6日前
株式会社アイシン
ロータ
2日前
トヨタ自動車株式会社
固定子
7日前
株式会社デンソー
回転機
今日
トヨタ自動車株式会社
製造装置
7日前
株式会社ダイヘン
充電装置
6日前
株式会社アイシン
ステータ
6日前
株式会社アイシン
ステータ
6日前
株式会社アイシン
ステータ
6日前
株式会社ダイヘン
充電装置
6日前
個人
太陽エネルギー収集システム
7日前
株式会社アイシン
ステータ
6日前
株式会社ダイヘン
充電装置
6日前
株式会社ダイヘン
充電装置
6日前
トヨタ自動車株式会社
被膜形成装置
7日前
株式会社kaisei
発電システム
2日前
株式会社ミツバ
回転電機
6日前
ASTI株式会社
電力変換装置
7日前
株式会社デンソー
電力変換装置
1日前
株式会社アイシン
保護装置
7日前
株式会社ダイヘン
インバータ装置
1日前
キヤノン株式会社
無線電力伝送システム
7日前
株式会社アイシン
駆動装置
7日前
シャープ株式会社
表示装置
7日前
矢崎総業株式会社
ワイヤーハーネス
2日前
大阪瓦斯株式会社
蓄電制御装置
7日前
株式会社デンソー
ステータ及びモータ
2日前
大阪瓦斯株式会社
動作制御装置
7日前
本田技研工業株式会社
電気機器
7日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ