TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025151043
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052264
出願日
2024-03-27
発明の名称
光測距装置
出願人
北陽電機株式会社
代理人
弁理士法人ブライタス
主分類
G01S
7/481 20060101AFI20251002BHJP(測定;試験)
要約
【課題】所定の方向に配列された複数の受光素子を備えた偏向装置において、製造コストの上昇を抑えつつ測定範囲を大きくすることができる技術を提供する。
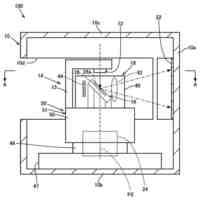
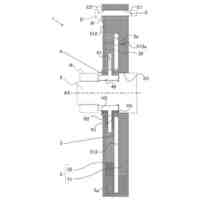
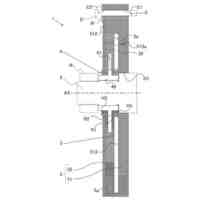
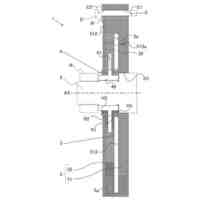
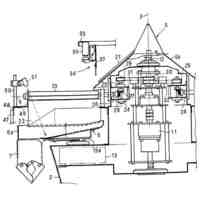
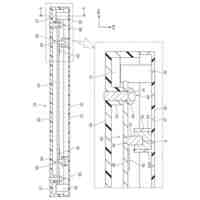
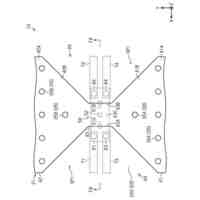
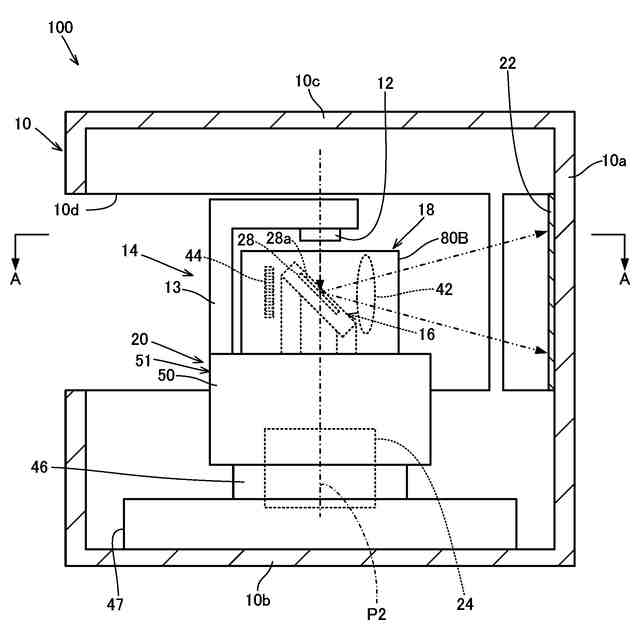
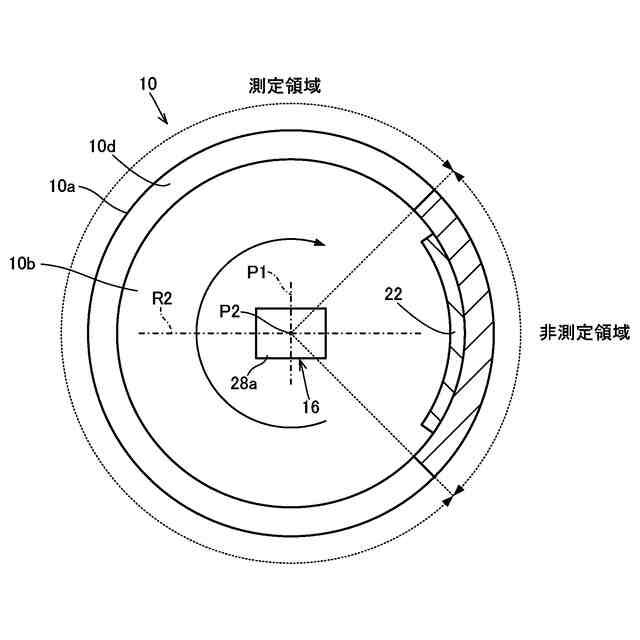
【解決手段】光測距装置100は、投光部12と、第1軸心P1周りに揺動可能な偏向ミラー28aを備えた第1偏向機構16と、第1軸心P1周りの方向に沿う方向に配列される複数の受光素子44aを有する受光部80A,80Bと、第1偏向機構16と受光部80A,80Bとを第2軸心P2周りに回転駆動する第2偏向機構20と、投光部12から出射され偏向ミラー28aで偏向反射した測定光が照射される基準反射部材22と、測定光および反射光に基づいて物体との距離を算出する制御部とを備える。受光部80Aは第1視野V1に対応して設けれ、受光部80Bは第2視野V2に対応して設けられる。受光部80A,80Bは、第2軸心P2を含む第2基準平面R2に対して対称に配置される。
【選択図】図4
特許請求の範囲
【請求項1】
測定光を出射する投光部と、
前記投光部から出射された前記測定光を偏向反射する光偏向部を含みかつ第1軸心周りに揺動可能な可動部および前記可動部を揺動駆動する駆動部を備えた第1偏向機構と、
それぞれ前記第1軸心周りの方向に沿う所定の方向に配列される複数の受光素子を有し、前記測定光のうち物体で反射された反射光をいずれかの前記受光素子で受光する、複数の受光部と、
少なくとも前記第1偏向機構および前記受光部を前記第1軸心とは異なる第2軸心周りに回転駆動する第2偏向機構と、
前記第1偏向機構と、前記第2偏向機構と、前記投光部と、前記受光部と、を制御して前記測定光および前記反射光に基づいて前記物体との距離を算出する制御部と、
を備え、
前記測定光は、前記光偏向部によって偏向反射されることによって、前記第1軸心周りの方向に沿って、前記第2軸心に交差する第1基準平面の一方側および他方側に走査され、
前記複数の受光部は、前記第1軸心周りの方向に沿う前記測定光の走査範囲のうち前記第1基準平面よりも前記一方側の領域を含む第1視野に対応して設けられた第1受光部と、前記走査範囲のうち前記第1基準平面よりも前記他方側の領域を含みかつ前記第1視野とは異なる第2視野に対応して設けられた第2受光部と、を含み、
前記第1受光部および前記第2受光部が、前記第1軸心周りの方向を含むとともに前記第2軸心を含む第2基準平面に対して対称に配置される、
光測距装置。
続きを表示(約 1,300 文字)
【請求項2】
前記走査範囲を前記第1基準平面で2分割した一方の領域が前記第1視野であり、前記走査範囲を前記第1基準平面で2分割した他方の領域が前記第2視野である、
請求項1に記載の光測距装置。
【請求項3】
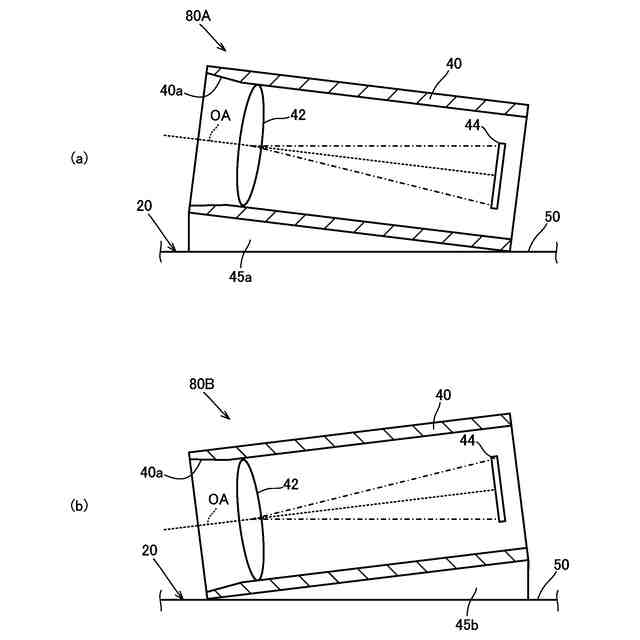
前記第1受光部および前記第2受光部が、それぞれ光学的に共通に設計されて、前記反射光を集光する受光レンズと、前記受光レンズで集光された前記反射光をそのいずれかで受光する前記所定の方向に配列された前記複数の受光素子と、を備え、対応する前記第1視野または前記第2視野に向くように互いに対して傾けて前記第2偏向機構に取り付けられる、
請求項1または2に記載の光測距装置。
【請求項4】
前記第1受光部および前記第2受光部がそれぞれ、前記受光レンズおよび前記複数の受光素子を前記第2偏向機構に取り付ける筐体を有し、2つの前記筐体が、それらの間に前記第1偏向機構によって前記第1軸心周りの方向に沿って走査される前記測定光が通過するガイド部としての空間を規定する、
請求項3に記載の光測距装置。
【請求項5】
前記第1偏向機構は、前記第2軸心周りに回転可能に前記第2偏向機構に支持された固定部と、前記可動部を前記固定部に支持させる梁部とを備えて構成され、
前記梁部は、前記駆動部により捻り回転駆動または撓み揺動駆動され、前記第1軸心として機能する、
請求項1に記載の光測距装置。
【請求項6】
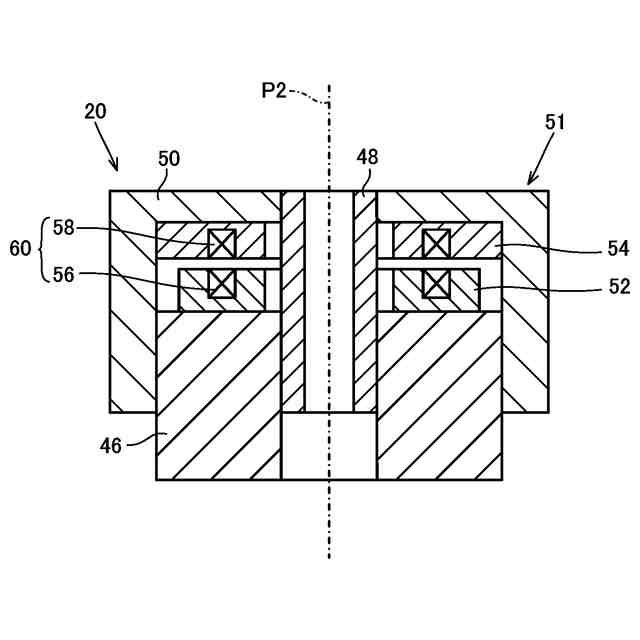
前記第2偏向機構の回転に伴って前記第2軸心周りに回転するように配置された受電部と、前記受電部と共通の軸心上で対向配置された送電部とを有する非接触給電部をさらに備え、
前記非接触給電部では、前記送電部から前記受電部に給電する、
請求項1に記載の光測距装置。
【請求項7】
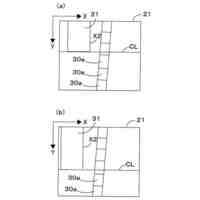
前記投光部から出射されて前記光偏向部で偏向反射された測定光が照射される基準反射部材と、
前記第1偏向機構の前記駆動部を制御する揺動制御部と、をさらに備え、
前記揺動制御部からの制御信号が前記駆動部に伝達される、
請求項1に記載の光測距装置。
【請求項8】
前記基準反射部材は、前記第2軸心周りに沿って反射率が等しい領域を備え、
前記揺動制御部は、前記受光部で受光された前記基準反射部材の前記反射率が等しい領域からの反射光に基づいて前記第1偏向機構による揺動振幅を検知する振幅検知部と、前記振幅検知部で検知された揺動振幅が所定の揺動振幅になるように前記駆動部を制御する振幅制御部と、を備えている、
請求項7に記載の光測距装置。
【請求項9】
前記駆動部は、前記可動部に形成された駆動用の圧電素子を含み、前記振幅制御部は、前記圧電素子に印加する電圧を制御する、請求項8に記載の光測距装置。
【請求項10】
前記駆動部は、前記可動部に形成された駆動用のコイルを含み、前記振幅制御部は、前記コイルに印加する電流を制御する、請求項8に記載の光測距装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、光測距装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
TOF(Time Of Flight)方式を利用して対象物までの距離を測定する測距装置が知られている。TOF方式を利用した測距装置では、対象物に対して測定光を照射した時刻からその測定光の反射光を受信した時刻までの時間を検出することによって、対象物までの距離を測定することができる。
【0003】
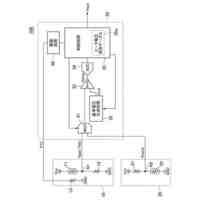
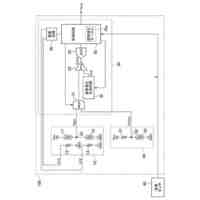
例えば、特許文献1に開示されたレーザー距離計測装置は、光源から出力された出力光を偏向させるMEMSミラーと、出力光が物体によって反射された反射光を検出する光検出器と、検出器によって検出された反射光に基づく信号を増幅する受光回路基板と、受光回路基板から出力された信号に基づいて物体までの距離を計測する制御回路基板と、光源、MEMSミラーおよび光検出器を含む光学系を回転させる回転機構と、を備えている。
【0004】
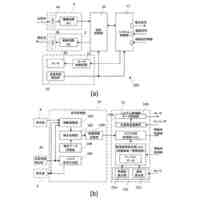
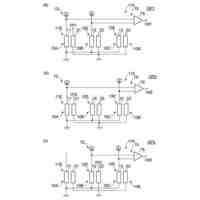
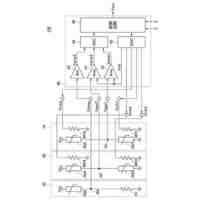
光検出器は、複数の検出素子を有している。受信回路基板は、複数のトランスインピーダンスアンプと、スイッチング回路と、増幅回路とを有している。制御回路基板は、制御回路と、TDC回路と、信号処理回路とを有している。
【0005】
受信回路基板の複数のトランスインピーダンスアンプは、光検出器の複数の検出素子にそれぞれ接続され、検出素子が発生した電流を電圧に変換して電気信号としてスイッチング回路に出力する。スイッチング回路は、制御回路基板の制御回路によって選択された検出素子から発生された電流に基づく電気信号を、トランスインピーダンスアンプを介して増幅回路に出力する。増幅回路は、スイッチング回路から出力された電気信号を増幅して制御回路基板のTDC回路に出力する。制御回路基板のTDC回路は、制御回路から入力されたパルス信号と増幅回路から入力された電気信号との時間差を示す信号を信号処理回路に出力する。信号処理回路は、TDC回路から入力された信号に対応する時間と光速とから物体までの距離を算出する。
【0006】
特許文献1のレーザー距離計測装置では、上記のような構成において、回転機構によって光学系を回転させつつ、MEMSミラーによって出力光を2次元走査することによって、3次元の距離計測を行うことができる。
【先行技術文献】
【特許文献】
【0007】
特開2018-128432号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記のレーザー測距装置において、所定の焦点距離で測定範囲(視野角度)を大きくするためには、各検出素子のサイズを大きくする必要がある。しかしながら、検出素子の製造コストが大幅に上昇し、測距装置の製造コストが上昇する。
【0009】
そこで、本発明の目的の一例は、所定の方向に配列された複数の受光素子を備えた光測距装置において、製造コストの上昇を抑えつつ測定範囲を大きくすることができる技術を提供することにある。
【課題を解決するための手段】
【0010】
(1)上記目的を達成するために、本発明の一側面における光測距装置は、測定光を出射する投光部と、前記投光部から出射された前記測定光を偏向反射する光偏向部を含みかつ第1軸心周りに揺動可能な可動部および前記可動部を揺動駆動する駆動部を備えた第1偏向機構と、それぞれ前記第1軸心周りの方向に沿う所定の方向に配列される複数の受光素子を有し、前記測定光のうち物体で反射された反射光をいずれかの前記受光素子で受光する、複数の受光部と、少なくとも前記第1偏向機構および前記受光部を前記第1軸心とは異なる第2軸心周りに回転駆動する第2偏向機構と、前記第1偏向機構と、前記第2偏向機構と、前記投光部と、前記受光部と、を制御して前記測定光および前記反射光に基づいて前記物体との距離を算出する制御部と、を備え、前記測定光は、前記光偏向部によって偏向反射されることによって、前記第1軸心周りの方向に沿って、前記第2軸心に交差する第1基準平面の一方側および他方側に走査され、前記複数の受光部は、前記第1軸心周りの方向に沿う前記測定光の走査範囲のうち前記第1基準平面よりも前記一方側の領域を含む第1視野に対応して設けられた第1受光部と、前記走査範囲のうち前記第1基準平面よりも前記他方側の領域を含みかつ前記第1視野とは異なる第2視野に対応して設けられた第2受光部と、を含み、前記第1受光部および前記第2受光部が、前記第1軸心周りの方向を含むとともに前記第2軸心を含む第2基準平面に対して対称に配置される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
北陽電機株式会社
光測距装置
9日前
北陽電機株式会社
偏向装置、光走査装置および光測距装置
9日前
北陽電機株式会社
物体検出装置および物体検出装置が搭載される移動体
4か月前
個人
メジャー文具
11日前
個人
アクセサリー型テスター
4日前
個人
高精度同時多点測定装置
3日前
ユニパルス株式会社
ロードセル
10日前
日本精機株式会社
位置検出装置
17日前
日本精機株式会社
位置検出装置
17日前
日本精機株式会社
位置検出装置
17日前
大和製衡株式会社
組合せ秤
22日前
大和製衡株式会社
組合せ秤
22日前
アズビル株式会社
圧力センサ
16日前
株式会社チノー
放射光測温装置
10日前
ダイキン工業株式会社
監視装置
8日前
株式会社ヨコオ
ソケット
9日前
エイブリック株式会社
磁気センサ回路
16日前
トヨタ自動車株式会社
検査装置
19日前
株式会社ヨコオ
ソケット
10日前
株式会社ユーシン
操作検出装置
19日前
株式会社東芝
センサ
22日前
株式会社東芝
センサ
22日前
トヨタ自動車株式会社
監視装置
9日前
TDK株式会社
磁気センサ
9日前
TDK株式会社
ガスセンサ
10日前
TDK株式会社
ガスセンサ
16日前
株式会社東芝
重量測定装置
15日前
ローム株式会社
半導体装置
2日前
東レエンジニアリング株式会社
計量装置
19日前
TDK株式会社
ガスセンサ
15日前
ローム株式会社
半導体装置
2日前
長崎県
形状計測方法
4日前
トヨタ自動車株式会社
測定システム
1日前
日本特殊陶業株式会社
センサ
8日前
ダイハツ工業株式会社
移動支援装置
9日前
株式会社デンソー
電流センサ
2日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ