TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025158632
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061372
出願日
2024-04-05
発明の名称
レーザレーダ装置
出願人
株式会社デンソーウェーブ
代理人
個人
,
個人
主分類
G01S
7/481 20060101AFI20251009BHJP(測定;試験)
要約
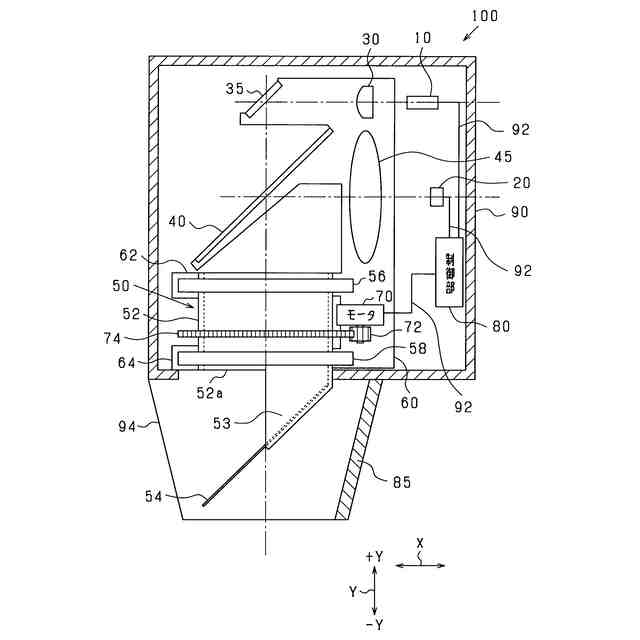
【課題】360°範囲の物体検知と測定距離補正とを共に行うことができるレーザレーダ装置を提供する。
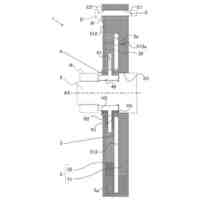
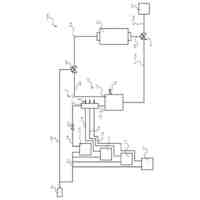
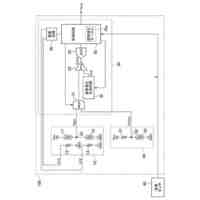
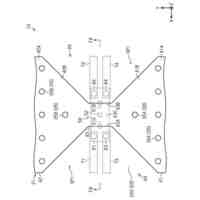
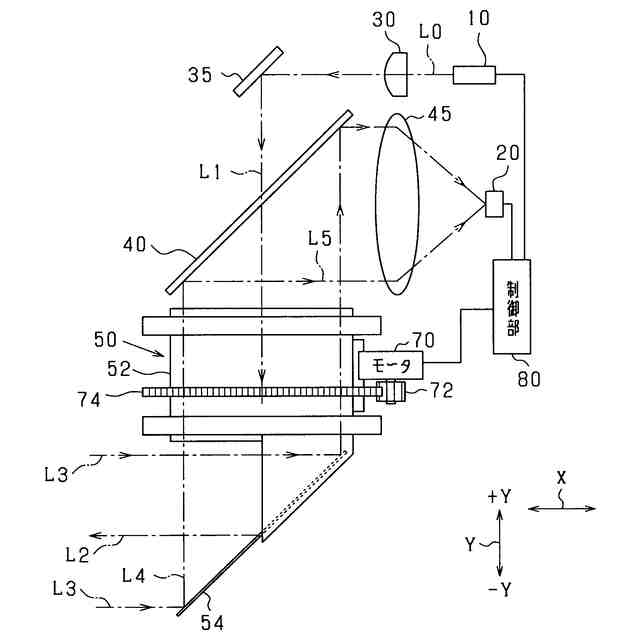
【解決手段】回転ミラー(54)は、所定の回転軸を中心として360°回転可能である。基準物体(85)は、回転ミラーから外部空間までの間に配置され、距離算出部(80)により算出されるべき真の距離が既知の基準距離であり、透明状態と不透明状態とに変化できる。距離算出部は、基準物体を不透明状態に変化させて基準物体によりレーザ光を反射させて測定した測定時間に基づき算出した基準物体までの距離と基準距離との相違に基づいて補正値を算出し、基準物体を透明状態に変化させて基準物体をレーザ光が透過する状態で測定した測定時間と補正値とに基づいて物体までの距離を算出する。
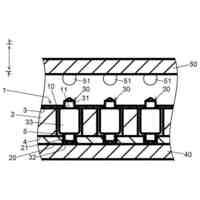
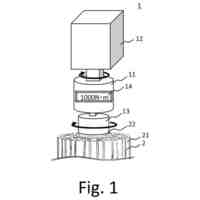
【選択図】 図2
特許請求の範囲
【請求項1】
レーザ光を投光する投光部と、
物体により反射された前記レーザ光である反射光を受光する受光部と、
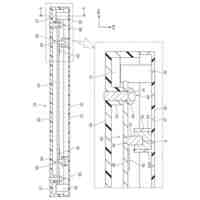
所定の回転軸を中心として360°回転可能であり、前記投光部により投光されて入射した前記レーザ光を360°範囲の外部空間に向けて反射し、入射した前記反射光を前記受光部により受光できるように反射する回転ミラーと、
前記投光部により前記レーザ光が投光されてから前記受光部により前記反射光が受光されるまでの時間を測定した測定時間に基づいて前記物体までの距離を算出する距離算出部と、
を備えるレーザレーダ装置であって、
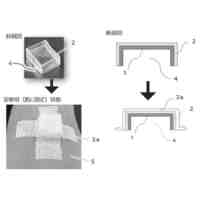
前記回転ミラーから前記外部空間までの間に配置され、前記距離算出部により算出されるべき真の距離が既知の基準距離であり、透明状態と不透明状態とに変化できる基準物体を備え、
前記距離算出部は、前記基準物体を前記不透明状態に変化させて前記基準物体により前記レーザ光を反射させて測定した前記測定時間に基づき算出した前記基準物体までの距離と前記基準距離との相違に基づいて補正値を算出し、前記基準物体を前記透明状態に変化させて前記基準物体を前記レーザ光が透過する状態で測定した前記測定時間と前記補正値とに基づいて前記物体までの距離を算出する、レーザレーダ装置。
続きを表示(約 840 文字)
【請求項2】
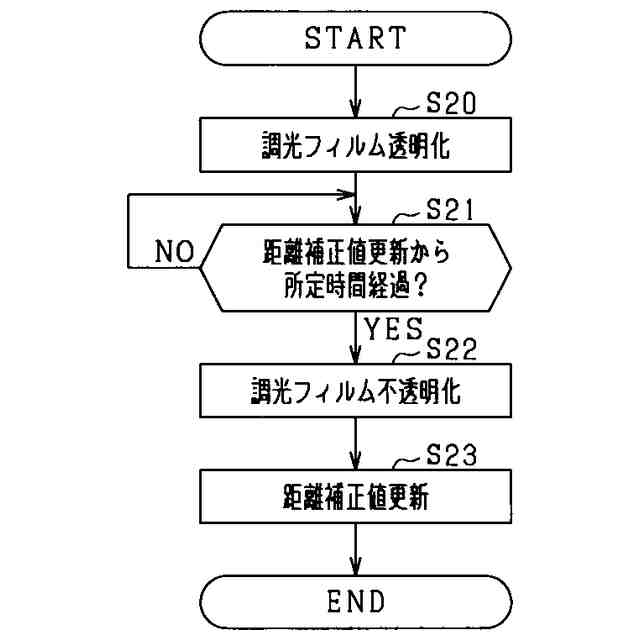
前記距離算出部は、所定時間が経過する毎に前記基準物体を前記不透明状態に変化させて前記補正値を算出してそれ以前の前記補正値を前記算出した補正値に更新した後、前記基準物体を前記透明状態に変化させる、請求項1に記載のレーザレーダ装置。
【請求項3】
前記距離算出部は、前記所定時間が経過する毎に、前記基準物体を前記不透明状態に変化させる前に前記レーザ光を前記基準物体を透過させて測定した前記測定時間と前記補正値とに基づいて前記物体までの距離を算出し、算出した前記物体までの距離が所定範囲である場合に、前記基準物体を前記不透明状態に変化させて前記補正値を算出することを禁止する、請求項2に記載のレーザレーダ装置。
【請求項4】
前記所定時間は、20[min]よりも長く且つ40[min]よりも短く設定されている、請求項3に記載のレーザレーダ装置。
【請求項5】
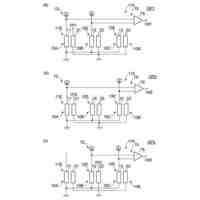
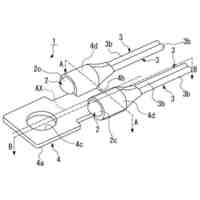
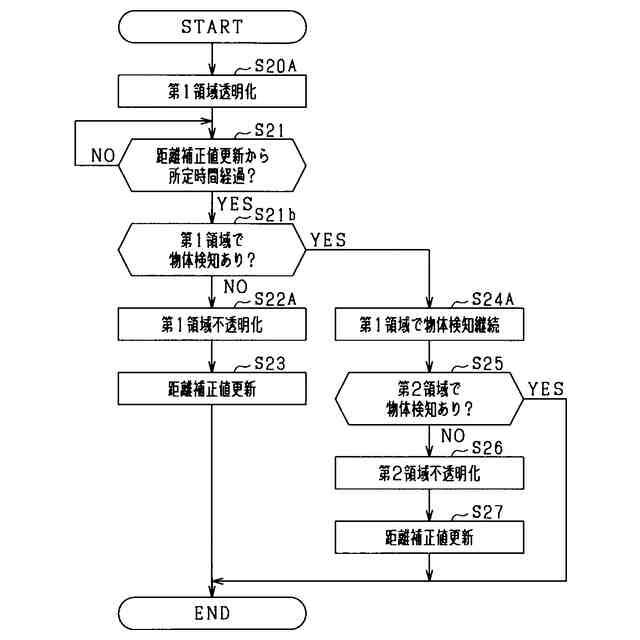
前記基準物体は、個別に前記透明状態と前記不透明状態とに変化できる複数の領域を有し、
前記距離算出部は、前記所定時間が経過する毎に、各領域を前記不透明状態に変化させる前に前記レーザ光を前記各領域を透過させて測定した前記測定時間と前記補正値とに基づいて前記物体までの距離を算出し、算出した前記物体までの距離が所定範囲になった前記領域である所定領域が存在する場合に前記所定領域を前記不透明状態に変化させて前記補正値を算出することを禁止し、前記複数の領域のうち前記所定領域以外の前記領域を前記不透明状態に変化させて前記補正値を算出する、請求項2に記載のレーザレーダ装置。
【請求項6】
前記距離算出部は、前記レーザレーダ装置の起動時に、前記基準物体を前記不透明状態に変化させて前記補正値を算出してそれ以前の前記補正値を前記算出した補正値に更新することを、所定の暖機時間が経過するまで継続する、請求項1~5のいずれか1項に記載のレーザレーダ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明はレーザレーダ装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
例えば、レーザ光を水平方向に向けて反射する反射鏡を備え、回転可能に配設された円筒部の下側の開口端面に反射鏡を配設し、反射鏡よりも上側に設けたモータによって円筒部を回転駆動するレーザレーダ装置がある(例えば特許文献1参照)。特許文献1に記載のレーザレーダ装置では、円筒部を360°回転させて、360°全周に亘ってレーザ光を投光するようにしても、モータを制御部につなぐ配線や、円筒部及び反射鏡を支持するフレームが、外部空間に向けて投光するレーザ光を遮ることがない。したがって、特許文献1に記載のレーザレーダ装置によれば、360°全周をレーザ光により走査して物体検知を行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開2018-132534号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、レーザレーダ装置の筐体内においてレーザ光の走査範囲の一部に基準物体を配置し、基準物体までの既知距離と基準物体までの測定距離との相違に基づいて、信号伝達遅延や、処理遅延、温度変化による特性変化、経年変化等による距離誤差を補正することが考えられる。しかし、特許文献1に記載のレーザレーダ装置のように360°範囲の物体検知を行う構成においては、筐体内においてレーザ光の走査範囲の一部に基準物体を配置することができず、測定距離補正を行うことができない。
【0005】
本発明は、こうした課題を解決するためになされたものであり、その主たる目的は、360°範囲の物体検知と測定距離補正とを共に行うことができるレーザレーダ装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するための第1の手段は、
レーザ光を投光する投光部と、
物体により反射された前記レーザ光である反射光を受光する受光部と、
所定の回転軸を中心として360°回転可能であり、前記投光部により投光されて入射した前記レーザ光を360°範囲の外部空間に向けて反射し、入射した前記反射光を前記受光部により受光できるように反射する回転ミラーと、
前記投光部により前記レーザ光が投光されてから前記受光部により前記反射光が受光されるまでの時間を測定した測定時間に基づいて前記物体までの距離を算出する距離算出部と、
を備えるレーザレーダ装置であって、
前記回転ミラーから前記外部空間までの間に配置され、前記距離算出部により算出されるべき真の距離が既知の基準距離であり、透明状態と不透明状態とに変化できる基準物体を備え、
前記距離算出部は、前記基準物体を前記不透明状態に変化させて前記基準物体により前記レーザ光を反射させて測定した前記測定時間に基づき算出した前記基準物体までの距離と前記基準距離との相違に基づいて補正値を算出し、前記基準物体を前記透明状態に変化させて前記基準物体を前記レーザ光が透過する状態で測定した前記測定時間と前記補正値とに基づいて前記物体までの距離を算出する。
【0007】
上記構成によれば、投光部はレーザ光を投光する。回転ミラーは、所定の回転軸を中心として360°回転可能であり、前記投光部により投光されて回転ミラーに入射した前記レーザ光を、360°範囲の外部空間に向けて反射する。このため、レーザレーダ装置は、360°範囲の外部空間をレーザ光により走査することができる。また、回転ミラーは、物体により反射されて回転ミラーに入射した反射光を、受光部により受光できるように反射する。受光部は反射光を受光する。そして、距離算出部は、前記投光部により前記レーザ光が投光されてから前記受光部により前記反射光が受光されるまでの時間を測定した測定時間に基づいて前記物体までの距離を算出する。したがって、レーザレーダ装置は、360°範囲の物体検知を行うことができる。
【0008】
ここで、基準物体は、前記回転ミラーから前記外部空間までの間に配置されており、透明状態と不透明状態とに変化できる。このため、基準物体を不透明状態に変化させることにより、基準物体によりレーザ光を反射することができ、前記測定時間に基づいて基準物体までの距離を算出することができる。また、前記距離算出部により算出されるべき真の距離は既知の基準距離である。算出した前記基準物体までの距離と前記基準距離との相違は、信号伝達遅延や、処理遅延、温度変化による特性変化、経年変化等が、物体までの距離の算出に現在及ぼしている影響を反映している。このため、前記距離算出部は、この相違に基づいて、測定距離補正に用いる補正値を算出することができる。
【0009】
一方、基準物体を透明状態に変化させることにより、レーザ光を基準物体を透過させて外部空間へ投光することができる。このため、基準物体が前記回転ミラーから前記外部空間までの間に配置されていても、レーザレーダ装置は360°範囲の物体検知を行うことができる。さらに、距離算出部は、前記基準物体を前記レーザ光が透過する状態で測定した前記測定時間と前記補正値とに基づいて、前記物体までの距離を算出する。このため、距離算出部は、補正値に基づいて測定距離を補正することができ、物体までの距離を正確に算出することができる。したがって、レーザレーダ装置は、360°範囲の物体検知と測定距離補正とを共に行うことができる。
【0010】
第2の手段では、前記距離算出部は、所定時間が経過する毎に前記基準物体を前記不透明状態に変化させて前記補正値を算出してそれ以前の前記補正値を前記算出した補正値に更新した後、前記基準物体を前記透明状態に変化させる。こうした構成によれば、所定時間が経過する毎に補正値が更新されるため、例えばレーザレーダ装置を設置した場所の外気温の変化に伴って測定距離の誤差が変化したとしても、補正値を適切な値に更新することができる。そして、距離算出部は、補正値を更新した後に前記基準物体を前記透明状態に変化させる。このため、レーザレーダ装置は、360°範囲の物体検知を継続しつつ、必要な時のみ基準物体を不透明状態に変化させて補正値を更新することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
13日前
個人
高精度同時多点測定装置
5日前
個人
アクセサリー型テスター
6日前
ユニパルス株式会社
ロードセル
12日前
日本精機株式会社
位置検出装置
19日前
日本精機株式会社
位置検出装置
19日前
日本精機株式会社
位置検出装置
19日前
大和製衡株式会社
組合せ秤
24日前
大和製衡株式会社
組合せ秤
24日前
アズビル株式会社
圧力センサ
18日前
株式会社ヨコオ
ソケット
11日前
トヨタ自動車株式会社
監視装置
11日前
ダイキン工業株式会社
監視装置
10日前
エイブリック株式会社
磁気センサ回路
18日前
株式会社ユーシン
操作検出装置
21日前
株式会社ヨコオ
ソケット
12日前
株式会社東芝
センサ
24日前
株式会社東芝
センサ
24日前
トヨタ自動車株式会社
検査装置
21日前
株式会社チノー
放射光測温装置
12日前
TDK株式会社
ガスセンサ
17日前
東レエンジニアリング株式会社
計量装置
21日前
ローム株式会社
半導体装置
4日前
株式会社東芝
重量測定装置
17日前
TDK株式会社
ガスセンサ
12日前
TDK株式会社
ガスセンサ
18日前
TDK株式会社
磁気センサ
11日前
ローム株式会社
半導体装置
4日前
株式会社ナリス化粧品
角層細胞採取用具
1か月前
長崎県
形状計測方法
6日前
トヨタ自動車株式会社
測定システム
3日前
三菱マテリアル株式会社
温度センサ
1か月前
TDK株式会社
電磁波センサ
12日前
三菱マテリアル株式会社
温度センサ
13日前
日本特殊陶業株式会社
センサ
10日前
日本特殊陶業株式会社
センサ
10日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ