TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025164519
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068538
出願日
2024-04-19
発明の名称
ヒッチ角推定装置、ヒッチ角推定方法及びプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G06T
7/60 20170101AFI20251023BHJP(計算;計数)
要約
【課題】ワールド座標系におけるトレーラのヒッチ角を適切に推定する。
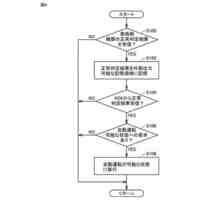
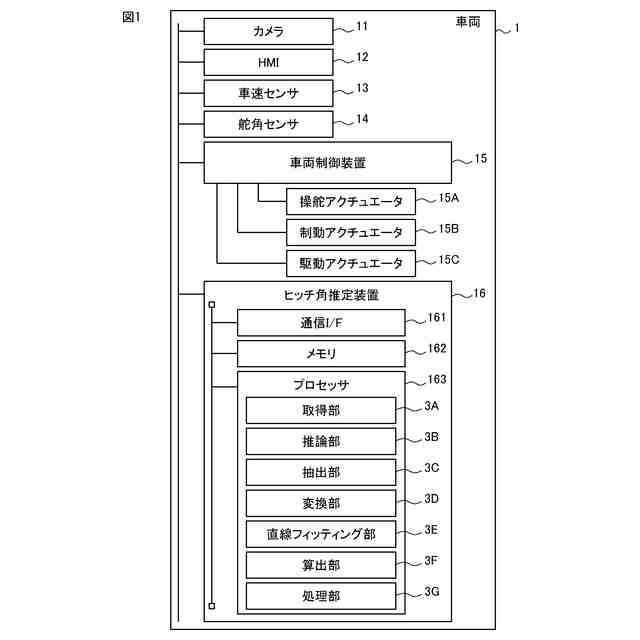
【解決手段】ヒッチ角推定装置16は、牽引バーを介してトレーラを牽引する車両1に搭載されたカメラ11によって撮影された画像上における牽引バー及びトレーラの下端部を示す点列に対してビュー座標系からワールド座標系への変換を実行する変換部3Dと、変換が実行された後の牽引バー及びトレーラの下端部を示す点列の直線フィッティングを実行する直線フィッティング部3Eと、直線フィッティングにより得られたワールド座標系における牽引バーを示す直線とワールド座標系におけるトレーラの下端部を示す直線とに基づいて、ワールド座標系におけるトレーラのヒッチ角を算出する算出部3Fと、算出部3Fによって算出されたワールド座標系におけるトレーラのヒッチ角に対してカルマンフィルタ処理を実行する処理部3Gとを備える。
【選択図】図1
特許請求の範囲
【請求項1】
牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像上における前記牽引バーを示す点列と前記画像上における前記トレーラの下端部を示す点列とに対してビュー座標系からワールド座標系への変換を実行する変換部と、
前記変換部によって変換が実行された後の前記牽引バーを示す点列の直線フィッティングと前記変換部によって変換が実行された後の前記トレーラの下端部を示す点列の直線フィッティングとを実行する直線フィッティング部と、
前記直線フィッティングにより得られた前記ワールド座標系における前記牽引バーを示す直線と前記ワールド座標系における前記トレーラの下端部を示す直線とに基づいて、前記ワールド座標系における前記トレーラのヒッチ角を算出する算出部と、
前記算出部によって算出された前記ワールド座標系における前記トレーラのヒッチ角に対してカルマンフィルタ処理を実行する処理部とを備え、
前記処理部は、
観測関数として前記算出部によって算出された前記ワールド座標系における前記トレーラのヒッチ角を用い、
状態遷移関数として、前記ビュー座標系から前記ワールド座標系への変換を前記画像に対して実行することによって得られる前記車両と前記トレーラと前記牽引バーとを示す運動モデルを用いることによって、
前記カルマンフィルタ処理が実行された後の前記ワールド座標系における前記トレーラのヒッチ角を出力する、
ヒッチ角推定装置。
続きを表示(約 1,700 文字)
【請求項2】
前記カルマンフィルタ処理に用いられるカルマンフィルタは、無香料カルマンフィルタである、請求項1に記載のヒッチ角推定装置。
【請求項3】
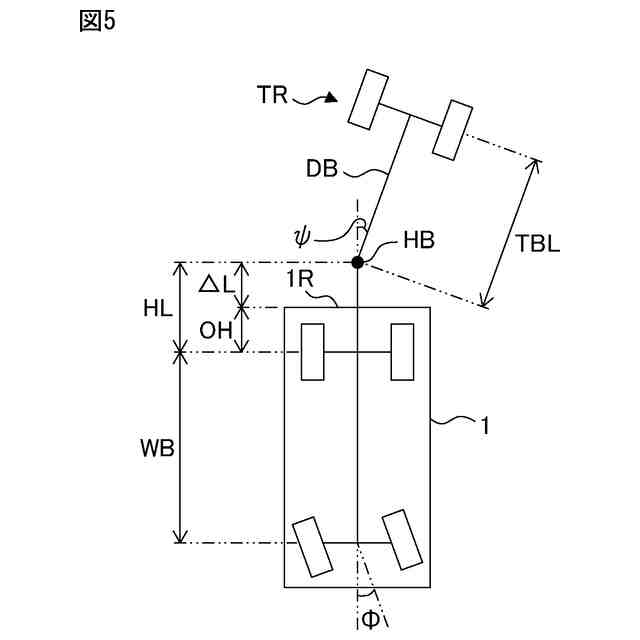
前記車両と前記トレーラと前記牽引バーとを示す運動モデルには、前記ワールド座標系における前記トレーラのヒッチ角と、前記ワールド座標系における前記車両の舵角と、前記ワールド座標系における前記車両の速度と、前記ワールド座標系における前記車両のホイールベースと、前記ワールド座標系における前記車両のヒッチ長と、前記ワールド座標系におけるトレーラビーム長とが含まれる、請求項1又は2に記載のヒッチ角推定装置。
【請求項4】
ヒッチ角推定装置が、牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像上における前記牽引バーを示す点列と前記画像上における前記トレーラの下端部を示す点列とに対してビュー座標系からワールド座標系への変換を実行する変換ステップと、
前記ヒッチ角推定装置が、前記変換ステップにおいて変換が実行された後の前記牽引バーを示す点列の直線フィッティングと前記変換ステップにおいて変換が実行された後の前記トレーラの下端部を示す点列の直線フィッティングとを実行する直線フィッティングステップと、
前記ヒッチ角推定装置が、前記直線フィッティングにより得られた前記ワールド座標系における前記牽引バーを示す直線と前記ワールド座標系における前記トレーラの下端部を示す直線とに基づいて、前記ワールド座標系における前記トレーラのヒッチ角を算出する算出ステップと、
前記ヒッチ角推定装置が、前記算出ステップにおいて算出された前記ワールド座標系における前記トレーラのヒッチ角に対してカルマンフィルタ処理を実行する処理ステップとを備え、
前記処理ステップでは、
観測関数として前記算出ステップにおいて算出された前記ワールド座標系における前記トレーラのヒッチ角が用いられ、
状態遷移関数として、前記ビュー座標系から前記ワールド座標系への変換を前記画像に対して実行することによって得られる前記車両と前記トレーラと前記牽引バーとを示す運動モデルが用いられることによって、
前記カルマンフィルタ処理が実行された後の前記ワールド座標系における前記トレーラのヒッチ角が出力される、
ヒッチ角推定方法。
【請求項5】
プロセッサに、
牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像上における前記牽引バーを示す点列と前記画像上における前記トレーラの下端部を示す点列とに対してビュー座標系からワールド座標系への変換を実行する変換ステップと、
前記変換ステップにおいて変換が実行された後の前記牽引バーを示す点列の直線フィッティングと前記変換ステップにおいて変換が実行された後の前記トレーラの下端部を示す点列の直線フィッティングとを実行する直線フィッティングステップと、
前記直線フィッティングにより得られた前記ワールド座標系における前記牽引バーを示す直線と前記ワールド座標系における前記トレーラの下端部を示す直線とに基づいて、前記ワールド座標系における前記トレーラのヒッチ角を算出する算出ステップと、
前記算出ステップにおいて算出された前記ワールド座標系における前記トレーラのヒッチ角に対してカルマンフィルタ処理を実行する処理ステップとを実行させるためのプログラムであって、
前記処理ステップでは、
観測関数として前記算出ステップにおいて算出された前記ワールド座標系における前記トレーラのヒッチ角が用いられ、
状態遷移関数として、前記ビュー座標系から前記ワールド座標系への変換を前記画像に対して実行することによって得られる前記車両と前記トレーラと前記牽引バーとを示す運動モデルが用いられることによって、
前記カルマンフィルタ処理が実行された後の前記ワールド座標系における前記トレーラのヒッチ角が出力される、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ヒッチ角推定装置、ヒッチ角推定方法及びプログラムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
特許文献1には、画像に基づくトレーラ角度推定について記載されている。特許文献1に記載された技術では、三次元角度測定値に基づく各トレーラ角度測定値に対して、カルマンフィルタリングが適用される。また、特許文献1に記載された技術では、画像中で検出された各車輪及びラインの経路(軌道)が、カルマンフィルタリングプロセスを使用して対応する二次元トレーラ角度と相関させられる。
【先行技術文献】
【特許文献】
【0003】
特開2023-178952号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1には、牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像が不鮮明な場合にその画像に基づいてワールド座標系におけるトレーラのヒッチ角を適切に推定するための技術について記載されていない。そのため、特許文献1に記載された技術では、牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像が不鮮明な場合等にその画像に基づいてワールド座標系におけるトレーラのヒッチ角を適切に推定することができない。
【0005】
上述した点に鑑み、本開示は、牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像が不鮮明な場合等においてもその画像に基づいてワールド座標系におけるトレーラのヒッチ角を適切に推定することができるヒッチ角推定装置、ヒッチ角推定方法及びプログラムを提供することを目的とする。
である。
【課題を解決するための手段】
【0006】
(1)本開示の一態様は、牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像上における前記牽引バーを示す点列と前記画像上における前記トレーラの下端部を示す点列とに対してビュー座標系からワールド座標系への変換を実行する変換部と、前記変換部によって変換が実行された後の前記牽引バーを示す点列の直線フィッティングと前記変換部によって変換が実行された後の前記トレーラの下端部を示す点列の直線フィッティングとを実行する直線フィッティング部と、前記直線フィッティングにより得られた前記ワールド座標系における前記牽引バーを示す直線と前記ワールド座標系における前記トレーラの下端部を示す直線とに基づいて、前記ワールド座標系における前記トレーラのヒッチ角を算出する算出部と、前記算出部によって算出された前記ワールド座標系における前記トレーラのヒッチ角に対してカルマンフィルタ処理を実行する処理部とを備え、前記処理部は、観測関数として前記算出部によって算出された前記ワールド座標系における前記トレーラのヒッチ角を用い、状態遷移関数として、前記ビュー座標系から前記ワールド座標系への変換を前記画像に対して実行することによって得られる前記車両と前記トレーラと前記牽引バーとを示す運動モデルを用いることによって、前記カルマンフィルタ処理が実行された後の前記ワールド座標系における前記トレーラのヒッチ角を出力する、ヒッチ角推定装置である。
【0007】
(2)(1)のヒッチ角推定装置では、前記カルマンフィルタ処理に用いられるカルマンフィルタは、無香料カルマンフィルタ(UKF:Unscented Kalman Filter)であってもよい。
【0008】
(3)(1)又は(2)のヒッチ角推定装置では、前記車両と前記トレーラと前記牽引バーとを示す運動モデルには、前記ワールド座標系における前記トレーラのヒッチ角と、前記ワールド座標系における前記車両の舵角と、前記ワールド座標系における前記車両の速度と、前記ワールド座標系における前記車両のホイールベースと、前記ワールド座標系における前記車両のヒッチ長と、前記ワールド座標系におけるトレーラビーム長とが含まれてもよい。
【0009】
(4)本開示の一態様は、ヒッチ角推定装置が、牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像上における前記牽引バーを示す点列と前記画像上における前記トレーラの下端部を示す点列とに対してビュー座標系からワールド座標系への変換を実行する変換ステップと、前記ヒッチ角推定装置が、前記変換ステップにおいて変換が実行された後の前記牽引バーを示す点列の直線フィッティングと前記変換ステップにおいて変換が実行された後の前記トレーラの下端部を示す点列の直線フィッティングとを実行する直線フィッティングステップと、前記ヒッチ角推定装置が、前記直線フィッティングにより得られた前記ワールド座標系における前記牽引バーを示す直線と前記ワールド座標系における前記トレーラの下端部を示す直線とに基づいて、前記ワールド座標系における前記トレーラのヒッチ角を算出する算出ステップと、前記ヒッチ角推定装置が、前記算出ステップにおいて算出された前記ワールド座標系における前記トレーラのヒッチ角に対してカルマンフィルタ処理を実行する処理ステップとを備え、前記処理ステップでは、観測関数として前記算出ステップにおいて算出された前記ワールド座標系における前記トレーラのヒッチ角が用いられ、状態遷移関数として、前記ビュー座標系から前記ワールド座標系への変換を前記画像に対して実行することによって得られる前記車両と前記トレーラと前記牽引バーとを示す運動モデルが用いられることによって、前記カルマンフィルタ処理が実行された後の前記ワールド座標系における前記トレーラのヒッチ角が出力される、ヒッチ角推定方法である。
【0010】
(5)本開示の一態様は、プロセッサに、牽引バーを介してトレーラを牽引する車両に搭載されたカメラによって撮影された画像上における前記牽引バーを示す点列と前記画像上における前記トレーラの下端部を示す点列とに対してビュー座標系からワールド座標系への変換を実行する変換ステップと、前記変換ステップにおいて変換が実行された後の前記牽引バーを示す点列の直線フィッティングと前記変換ステップにおいて変換が実行された後の前記トレーラの下端部を示す点列の直線フィッティングとを実行する直線フィッティングステップと、前記直線フィッティングにより得られた前記ワールド座標系における前記牽引バーを示す直線と前記ワールド座標系における前記トレーラの下端部を示す直線とに基づいて、前記ワールド座標系における前記トレーラのヒッチ角を算出する算出ステップと、前記算出ステップにおいて算出された前記ワールド座標系における前記トレーラのヒッチ角に対してカルマンフィルタ処理を実行する処理ステップとを実行させるためのプログラムであって、前記処理ステップでは、観測関数として前記算出ステップにおいて算出された前記ワールド座標系における前記トレーラのヒッチ角が用いられ、状態遷移関数として、前記ビュー座標系から前記ワールド座標系への変換を前記画像に対して実行することによって得られる前記車両と前記トレーラと前記牽引バーとを示す運動モデルが用いられることによって、前記カルマンフィルタ処理が実行された後の前記ワールド座標系における前記トレーラのヒッチ角が出力される、プログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車体
15日前
トヨタ自動車株式会社
方法
14日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
方法
12日前
トヨタ自動車株式会社
治具
7日前
トヨタ自動車株式会社
モータ
9日前
トヨタ自動車株式会社
サーバ
9日前
トヨタ自動車株式会社
正極層
12日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
飛行体
19日前
トヨタ自動車株式会社
電動機
12日前
トヨタ自動車株式会社
自動車
13日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
通知装置
12日前
トヨタ自動車株式会社
蓄電セル
12日前
トヨタ自動車株式会社
端末装置
19日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
電源装置
19日前
トヨタ自動車株式会社
バッテリ
12日前
トヨタ自動車株式会社
蓄電セル
12日前
トヨタ自動車株式会社
電源装置
7日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ