TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024161732
公報種別
公開特許公報(A)
公開日
2024-11-20
出願番号
2023076710
出願日
2023-05-08
発明の名称
ロボットハンド
出願人
学校法人立命館
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20241113BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
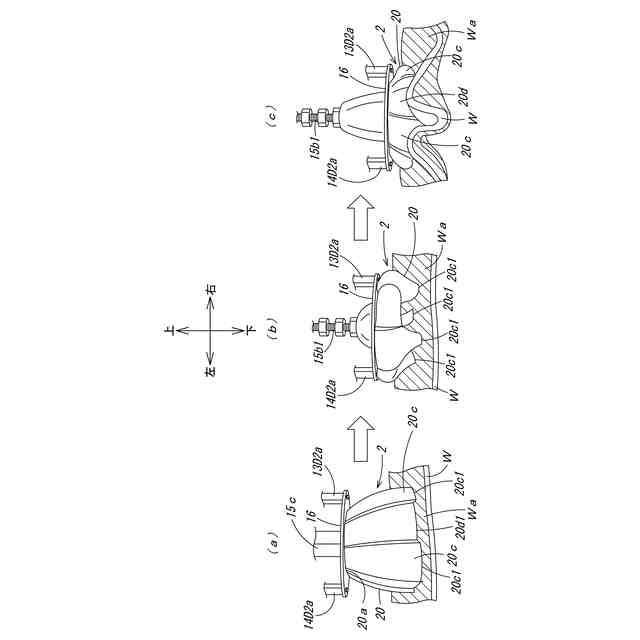
【課題】厚みが薄い形状をした布などの様々なワークを正確に把持することができるロボットハンドを提供する。
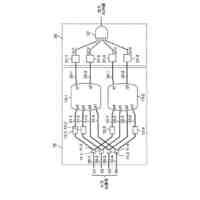
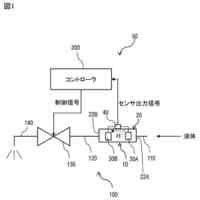
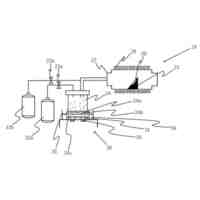
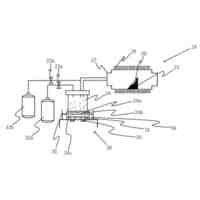
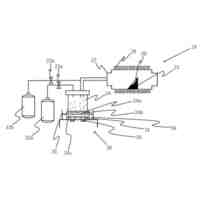
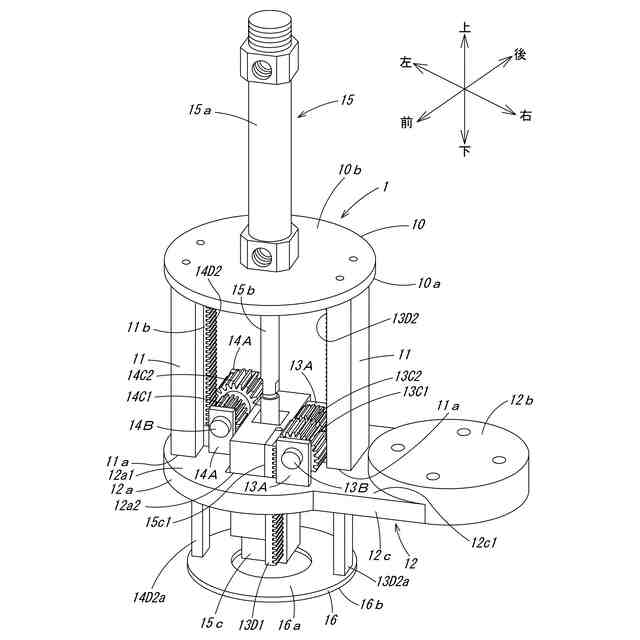
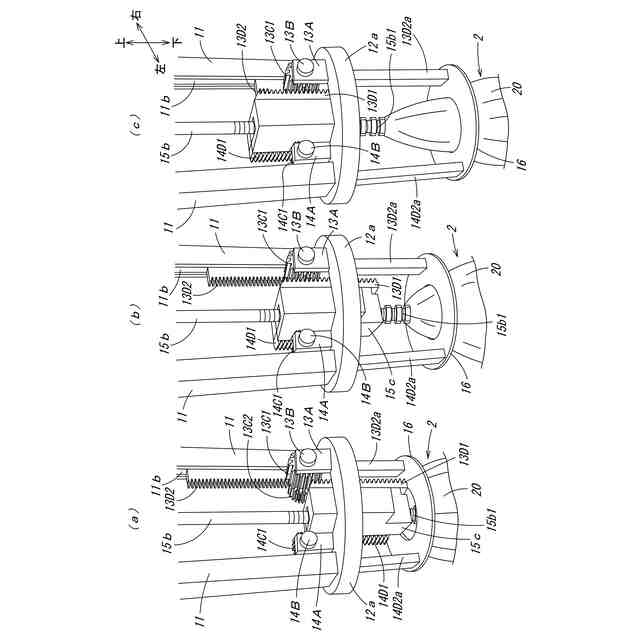
【解決手段】エアシリンダ15のピストンロッド15bが鉛直上方向に移動すると、右側第1ラックレール13D1,左側第1ラックレール14D1も鉛直上方向に移動する。このため、前部右側歯車13C1,後部左側歯車14D2が回転する。これによって、後部右側歯車13C2,前部左側歯車14C1が回転することとなり、これに伴って、右側第2ラックレール14D1,左側第2ラックレール14D2が鉛直下方向に移動する。これにより、下部固定台16が鉛直下方向に移動することとなるから、下部固定台16によって、グリッパが鉛直下方向に押圧される。そのため、ワークに対して該グリッパの接触を維持させながら、該グリッパを閉じることによりワークを把持することができる。
【選択図】図1
特許請求の範囲
【請求項1】
所定のワークを把持することができるグリッパと、
前記グリッパにて前記所定のワークを把持する際、該所定のワークに対して該グリッパの接触を維持させながら、該グリッパを閉じることにより該所定のワークを把持する把持機構と、を有してなるロボットハンド。
続きを表示(約 670 文字)
【請求項2】
前記把持機構は、
前記グリッパを開閉する開閉部材と、
前記グリッパの基端面側に位置する固定部と、
前記開閉部材に取り付けられている第1ラックレールと、
前記固定部に取り付けられている第2ラックレールと、
前記第1ラックレールが噛み合っている第1歯車と、
前記第2ラックレールが噛み合っている第2歯車と、を有し、
前記開閉部材が鉛直上方向に移動すると、前記グリッパが閉じるが、この際、前記第1ラックレールも鉛直上方向に移動するため、前記第1歯車が回転し、これによって、前記第2歯車が回転することとなり、これに伴って、前記第2ラックレールが鉛直下方向に移動し、これにより、前記固定部が鉛直下方向に移動することとなるから、該固定部によって、前記グリッパが鉛直下方向に押圧されるため、前記所定のワークに対して該グリッパの接触を維持させながら、該グリッパを閉じることにより該所定のワークを把持することができる請求項1に記載のロボットハンド。
【請求項3】
前記グリッパは、
基端面及び先端面が開放され、内部が中空に形成されると共に、該先端面が凹凸状に形成され、
前記先端面の凹部分には、前記開閉部材の先端部に取り付けられる取付片が一体的に設けられてなる請求項1又は2に記載のロボットハンド。
【請求項4】
前記グリッパの外周面が凹凸状に形成されていることにより、前記先端面が凹凸状に形成されてなる請求項3に記載のロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンドに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来のロボットハンドとして、例えば、特許文献1に記載のものが知られている。この特許文献1に記載のロボットハンドは、ワークセット位置とワーク補正位置との間を昇降駆動されるワーク保持部を備え、該ワーク保持部において、ワークを吸着して保持するというものである。
【先行技術文献】
【特許文献】
【0003】
特開平06-182689号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のようなロボットハンドでは、ワークを吸着、特に、厚みが薄い形状をした布を吸着しようとすると、布の素材の違いによって、吸着の強さを調節しなければならず、その調節が非常に難しいという問題があった。そのため、様々な種類の布を正確に把持(吸着含む)することは難しいという問題があった。
【0005】
そこで、本発明は、上記問題に鑑み、厚みが薄い形状をした布などの様々なワークを正確に把持することができるロボットハンドを提供することを目的としている。
【課題を解決するための手段】
【0006】
上記本発明の目的は、以下の手段によって達成される。なお、括弧内は、後述する実施形態の参照符号を付したものであるが、本発明はこれに限定されるものではない。
【0007】
請求項1に係るロボットハンドは、所定のワーク(W)を把持することができるグリッパ(2)と、
前記グリッパ(2)にて前記所定のワーク(W)を把持する際、該所定のワーク(W)に対して該グリッパ(2)の接触を維持させながら、該グリッパ(2)を閉じることにより該所定のワーク(W)を把持する把持機構(1)と、を有してなることを特徴としている。
【0008】
請求項2に係るロボットハンドは、上記請求項1に記載のロボットハンドにおいて、
前記把持機構(1)は、
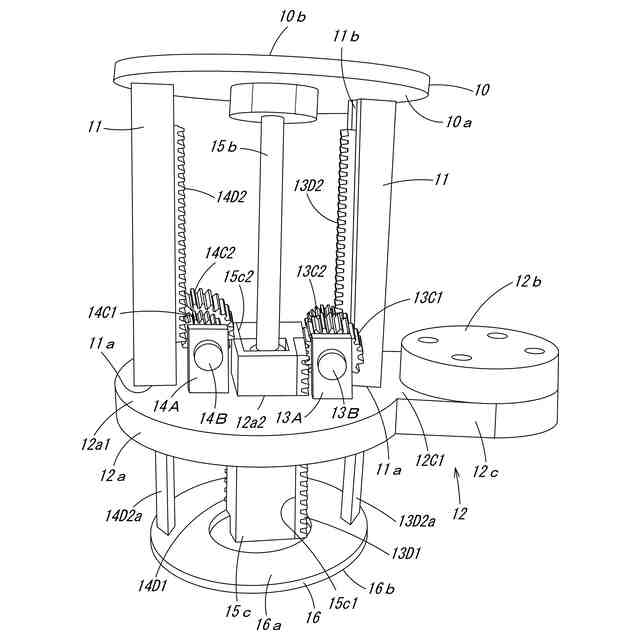
前記グリッパ(2)を開閉する開閉部材(エアシリンダ15)と、
前記グリッパ(2)の基端面(20a)側に位置する固定部(下部固定台16)と、
前記開閉部材(エアシリンダ15の可動台15c)に取り付けられている第1ラックレール(右側第1ラックレール13D1,左側第1ラックレール14D1)と、
前記固定部(下部固定台16)に取り付けられている第2ラックレール(右側第2ラックレール13D2,左側第2ラックレール14D2)と、
前記第1ラックレール(右側第1ラックレール13D1,左側第1ラックレール14D1)が噛み合っている第1歯車(前部右側歯車13C1,後部左側歯車14C2)と、
前記第2ラックレール(右側第2ラックレール13D2,左側第2ラックレール14D2)が噛み合っている第2歯車(後部右側歯車13C2,前部左側歯車14C1)と、を有し、
前記開閉部材(エアシリンダ15のピストンロッド15b)が鉛直上方向に移動すると、前記グリッパ(2)が閉じるが、この際、前記第1ラックレール(右側第1ラックレール13D1,左側第1ラックレール14D1)も鉛直上方向に移動するため、前記第1歯車(前部右側歯車13C1,後部左側歯車14C2)が回転し、これによって、前記第2歯車(後部右側歯車13C2,前部左側歯車14C1)が回転することとなり、これに伴って、前記第2ラックレール(右側第2ラックレール13D2,左側第2ラックレール14D2)が鉛直下方向に移動し、これにより、前記固定部(下部固定台16)が鉛直下方向に移動することとなるから、該固定部(下部固定台16)によって、前記グリッパ(2)が鉛直下方向に押圧されるため、前記所定のワーク(W)に対して該グリッパ(2)の接触を維持させながら、該グリッパ(2)を閉じることにより該所定のワーク(W)を把持することができることを特徴としている。
【0009】
請求項3に係るロボットハンドは、上記請求項1又は2に記載のロボットハンドにおいて、
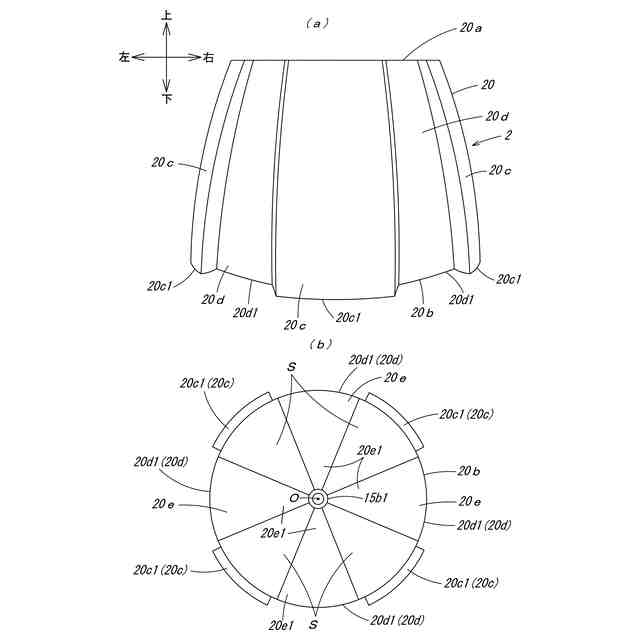
前記グリッパ(2)は、
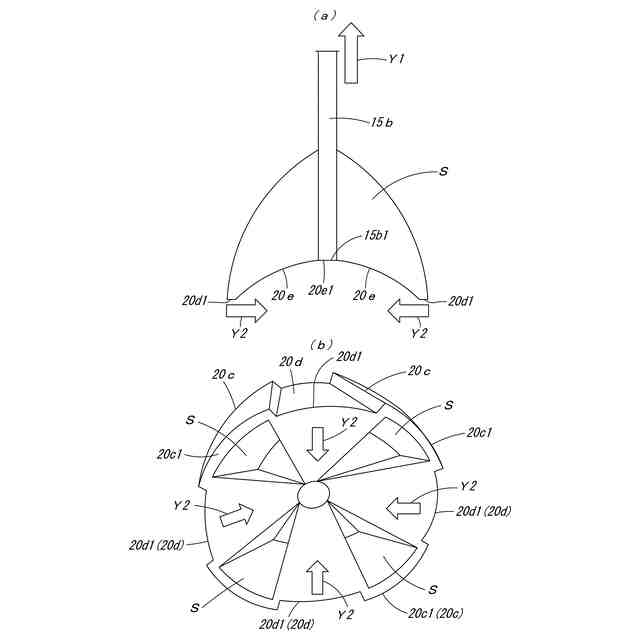
基端面(20a)及び先端面(20b)が開放され、内部が中空(S)に形成されると共に、該先端面(20b)が凹凸状に形成され、
前記先端面(20b)の凹部分(凹部20dの先端面20d1)には、前記開閉部材(エアシリンダ15のピストンロッド15b)の先端部(15b1)に取り付けられる取付片(20e)が一体的に設けられてなることを特徴としている。
【0010】
請求項4に係るロボットハンドは、上記請求項3に記載のロボットハンドにおいて、
前記グリッパ(2)の外周面が凹凸状(凸部20c,凹部20d)に形成されていることにより、前記先端面(20b)が凹凸状(凸部20cの先端面20c1,凹部20dの先端面20d1)に形成されてなることを特徴としている。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人立命館
光演算装置
4か月前
学校法人立命館
液面レベルセンサ
1か月前
学校法人立命館
情報埋め込み方法
2か月前
学校法人立命館
バイオ炭の分析方法
1か月前
学校法人立命館
センサ及びセンサシステム
1か月前
学校法人立命館
運動誘導装置、運動誘導方法
6か月前
学校法人立命館
流路構造、流路構造製造方法
5か月前
トヨタ自動車株式会社
色処理方法
7か月前
株式会社豊田自動織機
電力変換装置
2日前
株式会社東洋レーベル
入眠促進装置
4か月前
学校法人立命館
コマンド入力装置、コマンド入力方法
7か月前
三洋化成工業株式会社
金属回収方法
3か月前
学校法人立命館
配管パイプ型微生物燃料電池及び配管システム
9か月前
学校法人立命館
筋組織カルシウム蓄積を抑制するビタミンD作用
5か月前
学校法人立命館
フェーズドアレーアンテナ装置及び無線通信装置
3か月前
学校法人立命館
個人認証装置、個人認証方法、個人認証プログラム
2か月前
学校法人立命館
感情推定装置、感情推定方法、感情推定プログラム
7か月前
Patentix株式会社
霧化装置及び製膜装置。
6か月前
学校法人立命館
処理装置、音響システム、先行音効果を生じさせる方法
25日前
学校法人立命館
異種タンパク質の大量生産が可能なナス科植物の四重変異体
4か月前
兵庫県
強化炭素繊維、炭素繊維シート及び炭素繊維強化剤
5日前
学校法人立命館
薄膜の膜厚を測定する測定方法、測定装置および測定プログラム
7か月前
学校法人立命館
設計システム、コンピュータ実装方法、及びコンピュータプログラム
7か月前
学校法人立命館
心理的距離推定装置、心理的距離推定方法、心理的距離推定プログラム
8か月前
学校法人立命館
アピイン生産のための新規遺伝子およびそれを用いたアピインの生産方法
8か月前
学校法人立命館
メッシュ生成システム、コンピュータ実装方法及びコンピュータプログラム
5か月前
Patentix株式会社
積層構造体、半導体装置、電子機器及びシステム
6か月前
Patentix株式会社
積層構造体、半導体装置、電子機器及びシステム
6か月前
Patentix株式会社
積層構造体、半導体装置、電子機器及びシステム
6か月前
Patentix株式会社
積層構造体、半導体装置、電子機器及びシステム
6か月前
Patentix株式会社
積層構造体、半導体装置、電子機器及びシステム
6か月前
Patentix株式会社
積層構造体、半導体装置、電子機器及びシステム
6か月前
美津濃株式会社
解析方法、解析装置、解析システム、および解析プログラム
8か月前
Patentix株式会社
積層構造体、半導体装置、電子機器及びシステム
6か月前
学校法人立命館
モデルの作成支援システム、コンピュータ実装方法及びコンピュータプログラム
6か月前
Patentix株式会社
結晶、積層構造体、半導体装置、電子機器及びシステム
6か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ