TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025072456
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2025015411,2022558706
出願日
2025-01-31,2020-10-29
発明の名称
はんだ付け装置及びはんだ付けシステム、並びに、加工装置
出願人
株式会社ニコン
代理人
個人
主分類
B23K
1/005 20060101AFI20250430BHJP(工作機械;他に分類されない金属加工)
要約
【課題】回路基板に配置されたはんだを溶融する加工光を照射するはんだ付け装置を提供する。
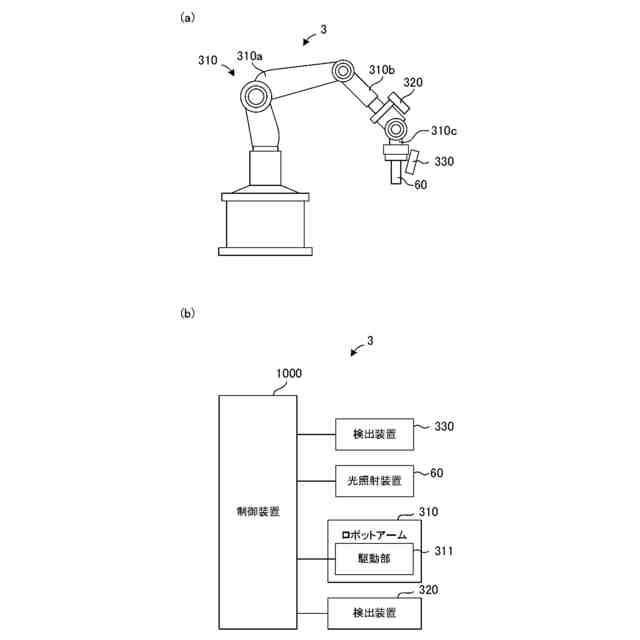
【解決手段】ガルバノミラーを有し、該ガルバノミラーを介して加工光を照射する光照射装置と、回路基板からの光を検出し、画像データと形状データとの少なくとも一方のデータを生成する検出装置と、光照射装置と検出装置とが設けられ、光照射装置と検出装置とを移動させる駆動部を有するロボットアームと、検出装置の変位に伴って変化する少なくとも一方のデータに基づいて、検出装置と共に変位する光照射装置からの加工光が同一位置に照射されるようにガルバノミラーの向きを制御する制御装置と、を備える。
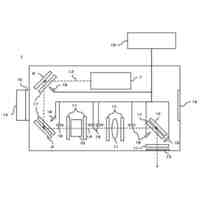
【選択図】図1
特許請求の範囲
【請求項1】
回路基板に配置されたはんだを溶融する加工光を照射するはんだ付け装置であって、
ガルバノミラーを有し、前記ガルバノミラーを介して前記加工光を照射する光照射装置と、
前記回路基板からの光を検出し、画像データと形状データとの少なくとも一方のデータを生成する検出装置と、
前記光照射装置と前記検出装置とが設けられ、前記光照射装置と前記検出装置とを移動させる駆動部を有するロボットアームと、
前記検出装置の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記検出装置と共に変位する前記光照射装置からの前記加工光が同一位置に照射されるように前記ガルバノミラーの向きを制御する制御装置と、
を備えることを特徴とするはんだ付け装置。
続きを表示(約 1,800 文字)
【請求項2】
前記制御装置は、前記駆動部の駆動を停止させるように前記駆動部を制御し、
前記制御装置は、前記駆動部の駆動が停止した後の前記検出装置の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記検出装置と共に変位する前記光照射装置からの前記加工光が前記同一位置に照射されるように前記ガルバノミラーの向きを制御する
ことを特徴とする請求項1に記載のはんだ付け装置。
【請求項3】
前記制御装置は、前記光照射装置と前記検出装置とが移動されるように前記駆動部を制御しつつ、前記ロボットアームにより移動される前記検出装置の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記ロボットアームにより移動される前記光照射装置からの前記加工光が前記同一位置に照射されるように前記ガルバノミラーの向きを制御することを特徴とする請求項1又は2に記載のはんだ付け装置。
【請求項4】
前記制御装置は、前記検出装置の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記検出装置と共に変位する前記光照射装置からの前記加工光の照射位置が第1位置に維持された後に前記第1位置とは異なる第2位置に維持されるように前記ガルバノミラーの向きを制御することを特徴とする請求項1乃至3のいずれか一項に記載のはんだ付け装置。
【請求項5】
前記制御装置は、前記駆動部の駆動を停止させるように前記駆動部を制御し、
前記制御装置は、前記駆動部の駆動が停止した後の前記検出装置の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記検出装置と共に変位する前記光照射装置からの前記加工光の照射位置が前記第1位置に維持された後に前記第2位置に維持されるように前記ガルバノミラーの向きを制御する
ことを特徴とする請求項4に記載のはんだ付け装置。
【請求項6】
前記制御装置は、前記光照射装置と前記検出装置とを移動させるように前記駆動部を制御しつつ、前記ロボットアームにより移動される前記検出装置の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記ロボットアームにより移動される前記光照射装置からの前記加工光の照射位置が前記第1位置に維持された後に前記第2位置に維持されるように前記ガルバノミラーの向きを制御することを特徴とする請求項4又は5に記載のはんだ付け装置。
【請求項7】
前記制御装置は、前記少なくとも一方のデータに基づいて、前記回路基板に前記光照射装置と前記検出装置とが近づくように前記ロボットアームの前記駆動部を制御し、前記光照射装置と前記検出装置とが前記回路基板に所定距離まで近づくと、前記検出装置の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記検出装置と共に変位する前記光照射装置からの前記加工光が前記同一位置に照射されるように前記ガルバノミラーの向きを制御することを特徴とする請求項1乃至6のいずれか一項に記載のはんだ付け装置。
【請求項8】
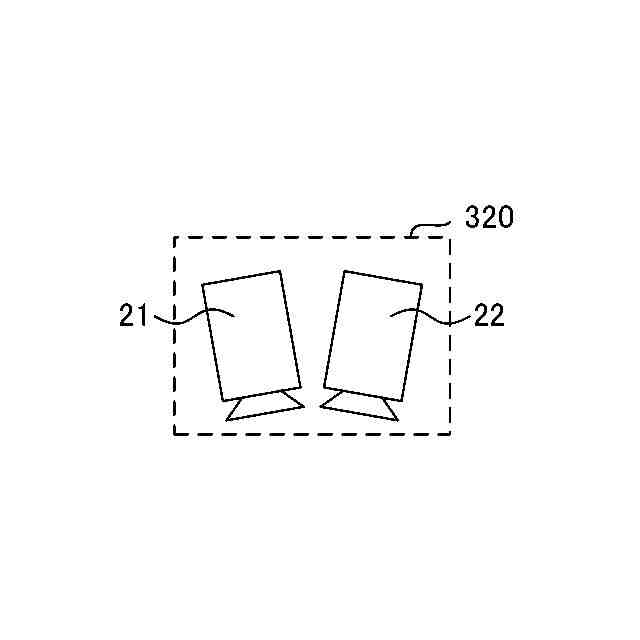
前記検出装置は、第1撮像部と、前記第1撮像部よりも視野の狭い第2撮像部とを有し、
前記制御装置は、前記第1撮像部が前記回路基板からの光を検出することにより生成された前記少なくとも一方のデータに基づいて、前記光照射装置と前記検出装置とが前記回路基板に近づくように前記駆動部を制御し、前記光照射装置と前記検出装置とが前記回路基板に所定距離まで近づくと、前記第2撮像部が前記回路基板からの光を検出することにより生成され、前記第2撮像部の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記第2撮像部と共に変位する前記光照射装置からの前記加工光が前記同一位置に照射されるように前記ガルバノミラーの向きを制御する
ことを特徴とする請求項1乃至7のいずれか一項に記載のはんだ付け装置。
【請求項9】
前記回路基板は、回路が形成された回路フィルムと基板とから成ることを特徴とする請求項1乃至8のいずれか一項に記載のはんだ付け装置。
【請求項10】
前記回路基板は、立体形状を有することを特徴とする請求項1乃至9のいずれか一項に記載のはんだ付け装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、加工光を照射してはんだ付けを行うはんだ付け装置及びはんだ付けシステム、並びに、加工光を照射して対象物を加工する加工装置の技術分野に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
この種の装置として、例えばロボットアームに取り付けられたレーザヘッドからはんだ付けすべき部分に向けてレーザ光を投射する装置が提案されている(特許文献1参照)。その他関連する技術として、特許文献2が挙げられる。この種の装置が有する技術的課題として、例えば立体的形状を有する基板(即ち、3D基板)に適切にはんだ付けを行うことが挙げられる。
【先行技術文献】
【特許文献】
【0003】
米国公開2001/0054637号公報
米国公開2015/0158176号公報
【発明の概要】
【0004】
第1の態様によれば、回路基板に配置されたはんだを溶融する加工光を照射するはんだ付け装置であって、ガルバノミラーを有し、前記ガルバノミラーを介して前記加工光を照射する光照射装置と、前記回路基板からの光を検出し、画像データと形状データとの少なくとも一方のデータを生成する検出装置と、前記光照射装置と前記検出装置とが設けられ、前記光照射装置と前記検出装置とを移動させる駆動部を有するロボットアームと、前記検出装置の変位に伴って変化する前記少なくとも一方のデータに基づいて、前記検出装置と共に変位する前記光照射装置からの前記加工光が同一位置に照射されるように前記ガルバノミラーの向きを制御する制御装置と、を備えるはんだ付け装置が提供される。
【0005】
第2の態様によれば、対象物に加工光を照射する加工装置であって、走査部を有し、前記走査部を介して前記加工光を照射する光照射装置と、前記対象物からの光を検出する検出装置と、前記光照射装置と前記検出装置とが設けられ、前記光照射装置と前記検出装置とを移動させる駆動部を有する移動装置と、前記検出装置の検出結果に基づいて前記走査部を制御する制御装置と、を備える加工装置が提供される。
【0006】
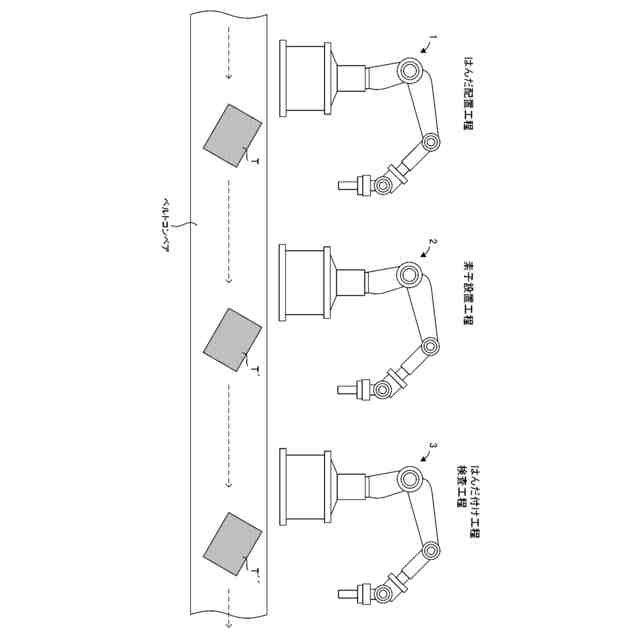
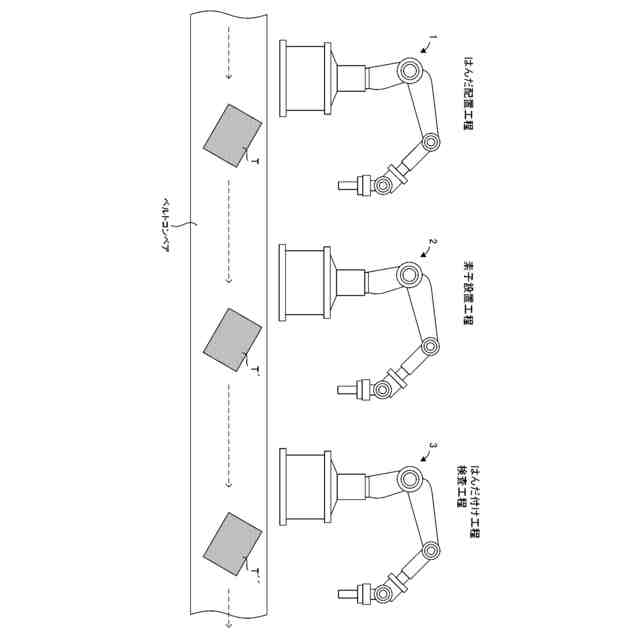
第3の態様によれば、回路基板に素子をはんだ付けするはんだ付けシステムであって、はんだを吐出するはんだ吐出装置が設けられ、前記はんだ吐出装置を移動させる駆動部を有する第1移動装置と、前記素子を保持可能な保持装置が設けられ、前記保持装置を移動させる駆動部を有する第2移動装置と、はんだを溶融する加工光を照射する光照射装置と前記回路基板からの光を検出する検出装置が設けられ、前記光照射装置と前記検出装置とを移動させる駆動部を有する第3移動装置と、(i)前記回路基板の所定部分にはんだが配置されるように前記はんだ吐出装置を制御し、(ii)前記配置された前記はんだを介して前記回路基板に前記素子が配置されるように前記保持装置を制御し、(iii)前記検出装置の検出結果に基づいて、前記回路基板に前記光照射装置を近づけるように前記第3移動装置の前記駆動部を制御し、配置された前記はんだを溶融するように前記光照射装置を制御する制御装置と、を備えるはんだ付けシステムが提供される。
【0007】
第4の態様によれば、回路基板に素子をはんだ付けするはんだ付けシステムであって、はんだを吐出するはんだ吐出装置と、前記素子を保持可能な保持装置と、はんだを溶融する加工光を照射する光照射装置と、前記回路基板からの光を検出する検出装置と、前記はんだ吐出装置、前記保持装置、前記光照射装置及び前記検出装置を移動させる駆動部を有する移動装置と、(i)前記はんだ吐出装置、前記保持装置、前記光照射装置及び前記検出装置が前記回路基板に近づくように前記駆動部を制御し、(ii)前記回路基板の所定部分にはんだが配置されるように前記はんだ吐出装置を制御し、(iii)配置された前記はんだを介して前記回路基板に前記素子が配置されるように前記保持装置を制御し(iv)配置された前記はんだを溶融するように前記光照射装置を制御する制御装置と、を備えるはんだ付けシステムが提供される。
【0008】
第5の態様によれば、対象物に加工光を照射する加工装置であって、前記加工光を照射する光照射装置と、前記対象物からの光を検出する検出装置と、前記光照射装置と前記検出装置とが設けられ、前記光照射装置と前記検出装置とを移動させる駆動部を有する移動装置と、前記検出装置の検出結果に基づいて前記駆動部を制御する制御装置と、を備える加工装置が提供される。
【図面の簡単な説明】
【0009】
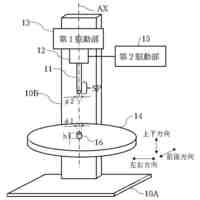
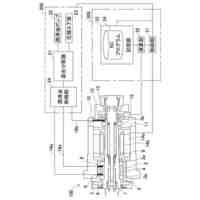
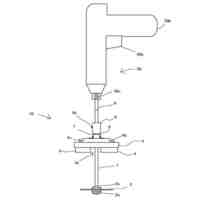
図1は、第1実施形態に係るはんだ付けシステムの全体構造を模式的に示す図である。
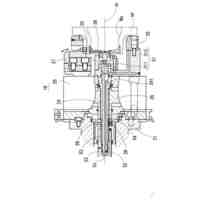
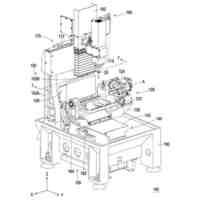
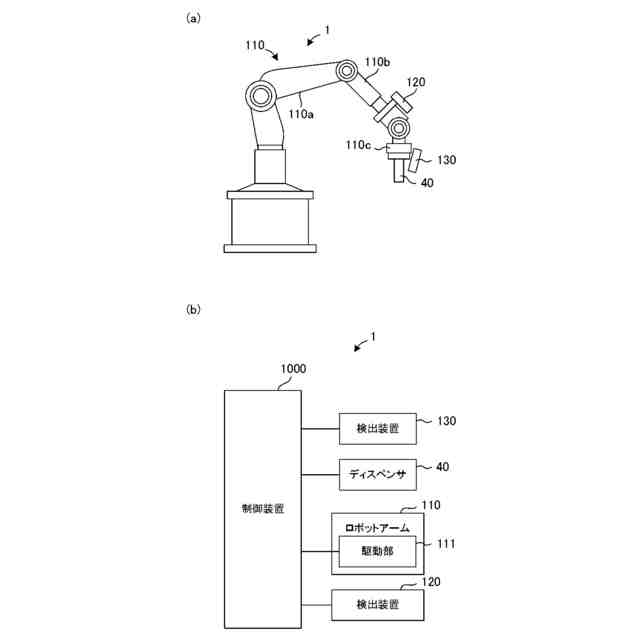
図2は、第1実施形態に係るはんだ付けシステムの一部を構成するロボットの構成を示すシステム構成図である。
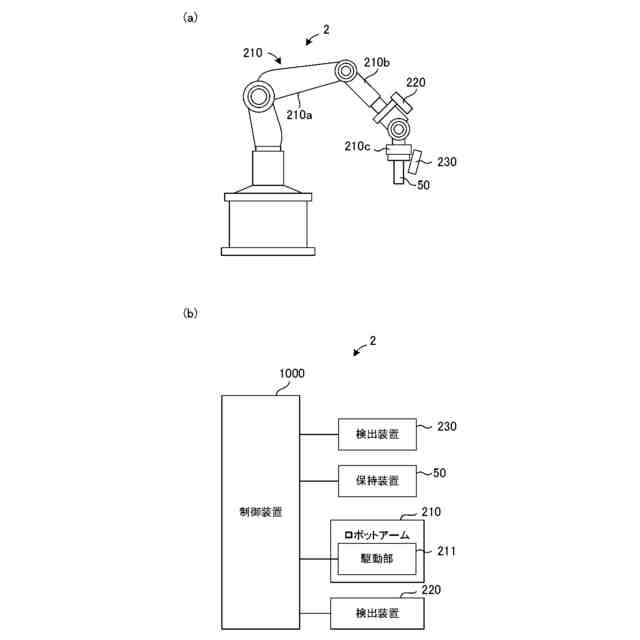
図3は、第1実施形態に係るはんだ付けシステムの他の一部を構成するロボットの構成を示すシステム構成図である。
図4は、第1実施形態に係るはんだ付けシステムの他の一部を構成するロボットの構成を示すシステム構成図である。
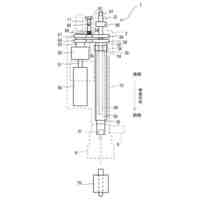
図5は、第1実施形態に係る一の検出装置の構成を模式的に示す図である。
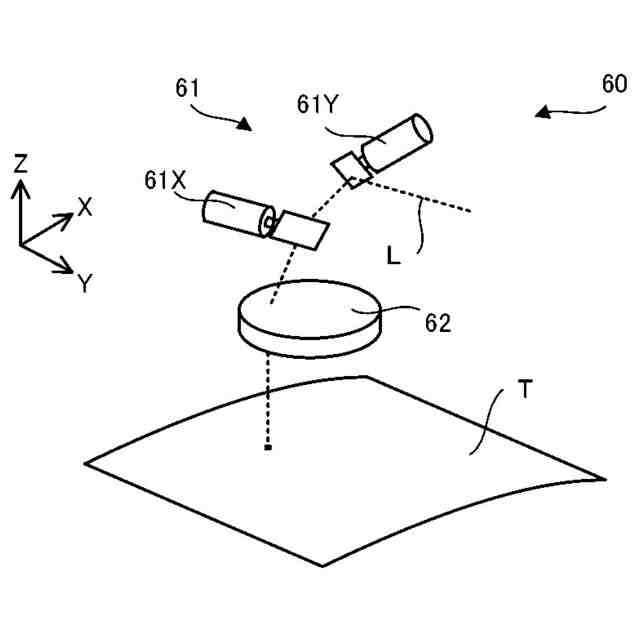
図6は、第1実施形態に係る他の検出装置の構成を模式的に示す図である。
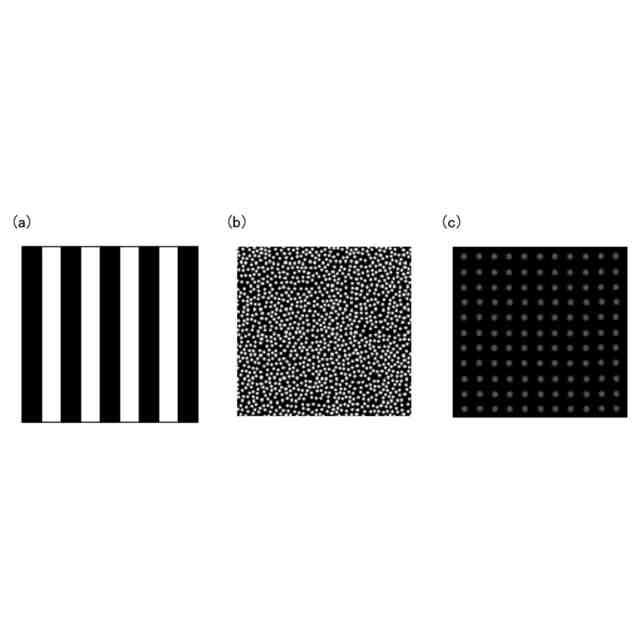
図7は、第1実施形態に係る他の検出装置が有するプロジェクタにより投影される構造光の一例を示す図である。
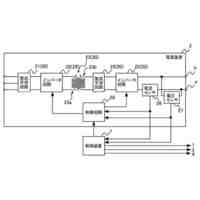
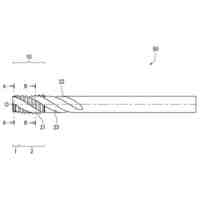
図8、第1実施形態に係る光照射装置が有する光路の一部を示す図である。
図9は、第1実施形態に係る制御装置が有するマッチング処理部の構成を模式的に示す図である。
図10は、第1実施形態に係るマッチング処理の概念を説明するための図である。
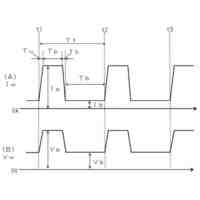
図11は、第1実施形態に係るマッチング処理のタイミングチャートの一例を示す図である。
図12は、第1実施形態に係る制御装置が有するトラッキング部の構成を模式的に示す図である。
図13は、第1実施形態に係るトラッキング処理のタイミングチャートの一例を示す図である。
図14は、第1実施形態に係るはんだ付けシステムの動作を示すフローチャートである。
図15は、加工光の照射方法の一例を示す図である。
図16は、エアブロー及び吸煙機を模式的に示す図である。
図17は、第2実施形態に係るはんだ付けシステムの構成を示すシステム構成図である。
図18は、第2実施形態に係るはんだ付けシステムの動作を示すフローチャートである。
図19は、変形例に係る光照射装置が有する光路の一部を示す図である。
図20は、変形例に係るトラッキング部の構成を模式的に示す図である。
図21は、第3実施形態に係るレーザ溶接システムの全体構成を模式的に示す図である。
図22は、第3実施形態に係るレーザ溶接システムの一部を構成するロボットの構成を示すシステム構成図である。
図23は、第3実施形態に係るレーザ溶接システムの他の一部を構成するロボットの構成を示すシステム構成図である。
図24は、第3実施形態に係るレーザ溶接システムの動作を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、実施形態について図面を参照しながら説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ニコン
細胞操作方法
2日前
株式会社ニコン
加工システム及び表示装置
2日前
株式会社ニコン
眼科装置及び断層画像生成装置
2日前
株式会社ニコン
視野検査方法、視野検査装置、および視野検査プログラム
6日前
株式会社ニコン
画像処理方法、プログラム、画像処理装置、及び眼科システム
2日前
個人
タップ
7日前
個人
加工機
1日前
株式会社不二越
ドリル
今日
株式会社不二越
ドリル
1か月前
日東精工株式会社
ねじ締め機
1か月前
株式会社FUJI
工作機械
1か月前
日東精工株式会社
多軸ねじ締め機
1か月前
有限会社 ナプラ
金属粒子
1か月前
株式会社アンド
半田付け方法
今日
株式会社アンド
半田付け方法
今日
株式会社ダイヘン
多層盛り溶接方法
15日前
日進工具株式会社
エンドミル
17日前
エフ・ピー・ツール株式会社
リーマ
17日前
ブラザー工業株式会社
工作機械
1か月前
株式会社FUJI
チャック装置
1か月前
ブラザー工業株式会社
工作機械
1か月前
トヨタ自動車株式会社
接合方法
29日前
ビアメカニクス株式会社
レーザ加工装置
1か月前
株式会社コスメック
クランプ装置
1か月前
株式会社コスメック
クランプ装置
1か月前
大肯精密株式会社
自動送り穿孔機
29日前
株式会社ダイヘン
溶接装置
28日前
オークマ株式会社
工作機械
1か月前
株式会社プロテリアル
金属箔の溶接方法
1か月前
株式会社不二越
超硬合金製ドリル
13日前
株式会社不二越
管用テーパタップ
1か月前
津田駒工業株式会社
2連回転割出し装置
1か月前
豊田鉄工株式会社
レーザー溶接装置
1か月前
株式会社不二越
通り穴加工用タップ
21日前
株式会社不二越
スカイビングカッタ
1か月前
個人
管の切断装置及び管の切断方法
15日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ