TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025073537
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023184437
出願日
2023-10-27
発明の名称
モータ
出願人
ミネベアミツミ株式会社
代理人
個人
,
個人
主分類
H02K
5/10 20060101AFI20250502BHJP(電力の発電,変換,配電)
要約
【課題】容易に組み立てることができるモータを提供する。
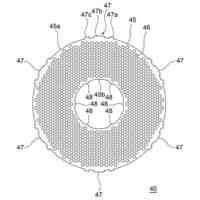
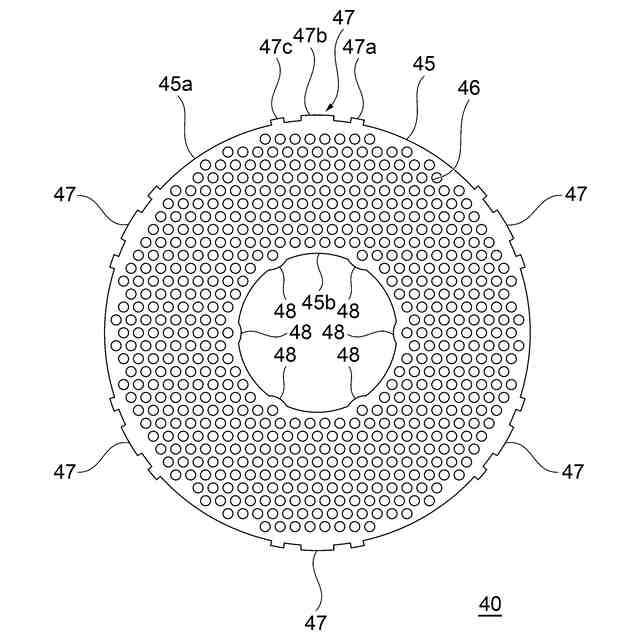
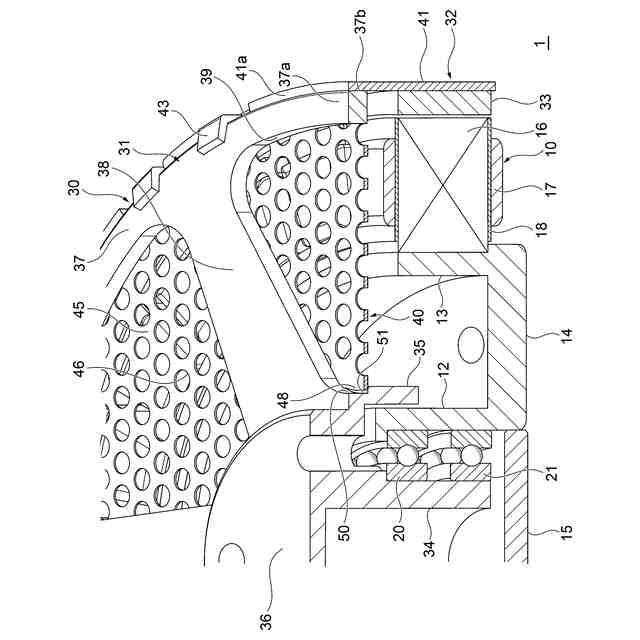
【解決手段】モータ1は、開口39を有するハウジング31と、ヨーク32と、前記ハウジング31の前記開口39を覆うプレート40と、を有するロータ30を備えている。前記プレート40は、径方向に延びる1又は複数の凸部47、48を有し、回転軸方向において、前記ヨーク32は前記ハウジング31に支持されている。前記回転軸方向において、前記凸部47、48は前記ハウジング31及び/又は前記ヨーク32に接触する。
【選択図】図4
特許請求の範囲
【請求項1】
開口を有するハウジングと、ヨークと、前記ハウジングの前記開口を覆うプレートと、を有するロータを備え、
前記プレートは、径方向に延びる1又は複数の凸部を有し、
回転軸方向において、前記ヨークは前記ハウジングに支持されており、
前記回転軸方向において、前記凸部は前記ハウジング及び/又は前記ヨークに接触する、モータ。
続きを表示(約 370 文字)
【請求項2】
前記複数の凸部は、前記プレートの外周部に配置された第1凸部を有し、
前記第1凸部は前記ハウジングと前記ヨークとの間に挟まれている、請求項1に記載のモータ。
【請求項3】
前記ハウジングは、筒と、前記筒を囲む環状の枠と、前記筒と前記環状の枠とを接続する複数のスポークと、を備え、
前記複数の凸部は、前記プレートの内周部にある第2凸部を有し、
前記第2凸部は、前記複数のスポークのうちの周方向に隣接する2つの前記スポークの間で前記筒に支持されている、請求項1又は2に記載のモータ。
【請求項4】
前記第2凸部は前記筒の凹部に収容されている、請求項3に記載のモータ。
【請求項5】
前記凹部が前記筒の外周面に形成されている、請求項4に記載のモータ。
発明の詳細な説明
【技術分野】
【0001】
本発明はモータに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
例えば特許文献1にはドローン用モータが開示されている。このモータでは、天板に形成された開口部がパンチングプレートで覆われている。このパンチングプレートによって、モータ内への塵埃の侵入を防止することができる。
【先行技術文献】
【特許文献】
【0003】
特開2023-86311号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
パンチングプレートは、天板の下面に形成されたカシメ部に係止されることによって天板に取り付けられる。この係止にあたって、天板の下面に形成された円筒部の一部を径方向に折り曲げる必要があり、プレートの取り付けには手間がかかる。
【0005】
そこで、本発明は、容易に組み立てることができるモータを提供することを課題の一例とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係るモータは、開口を有するハウジングと、ヨークと、前記ハウジングの前記開口を覆うプレートと、を有するロータを備え、前記プレートは、径方向に延びる1又は複数の凸部を有し、回転軸方向において、前記ヨークは前記ハウジングに支持されており、前記回転軸方向において、前記凸部は前記ハウジング及び/又は前記ヨークに接触する。
【図面の簡単な説明】
【0007】
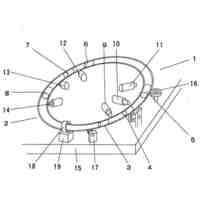
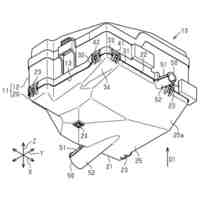
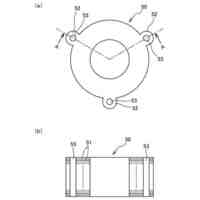
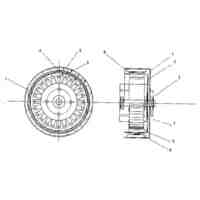
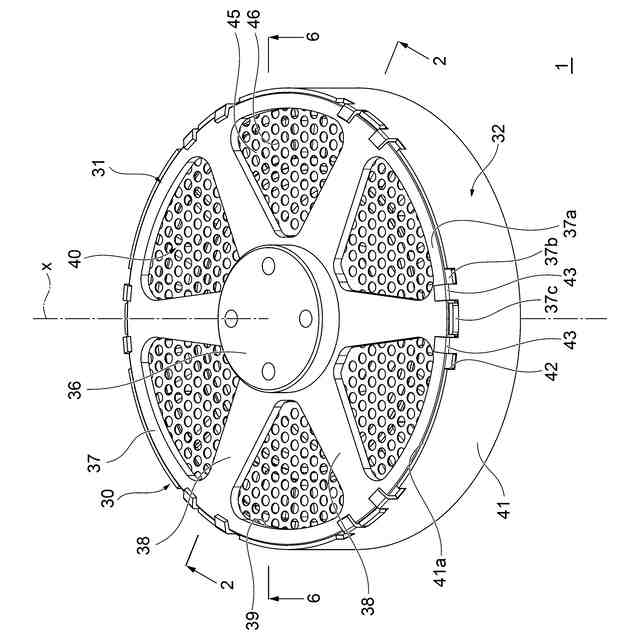
本発明の一実施形態に係るモータ1の構造を概略的に示す斜視図である。
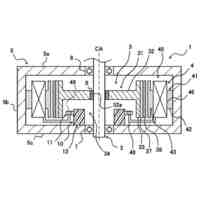
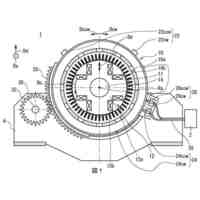
図1の2-2線に沿ったモータ1の断面図である。
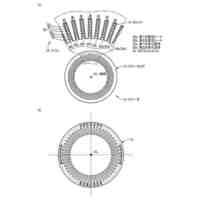
ハウジング31及びヨーク32の構造を概略的に示す部分拡大斜視図である。
一具体例に係るプレート40の構造を概略的に示す平面図である。
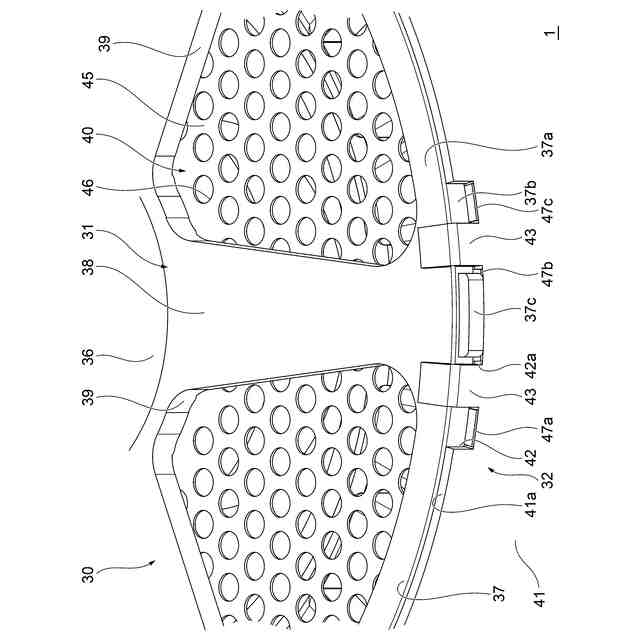
図1の2-2線に沿った断面における部分拡大斜視断面図である。
図1の6-6線に沿った断面における部分拡大斜視断面図である。
一具体例に係るハウジング31の構造を概略的に示すハウジング31の単体の部分拡大斜視図である。
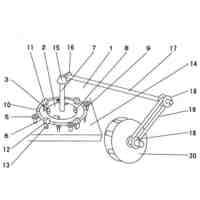
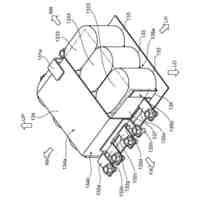
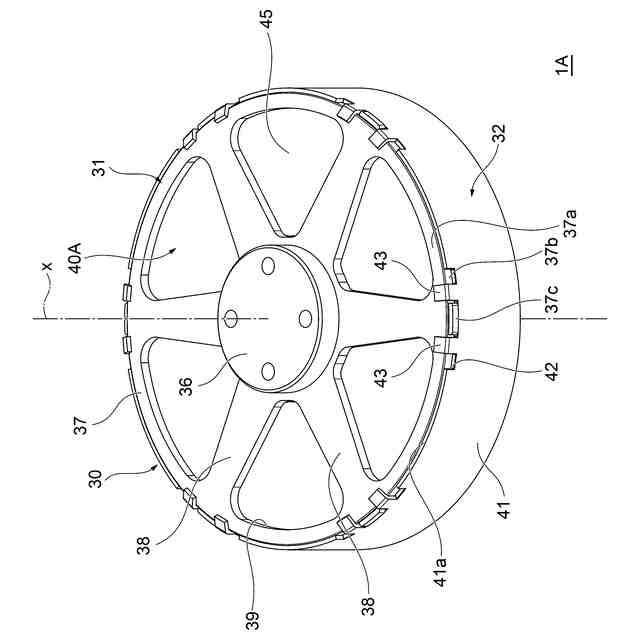
本発明の別の実施形態に係るモータ1Aの構造を概略的に示す斜視図である。
【発明を実施するための形態】
【0008】
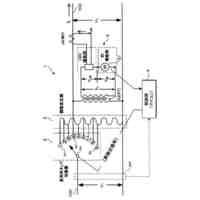
以下、添付図面を参照して、本発明の実施形態について説明する。図1は、本発明の一実施形態に係るモータ1の構造を概略的に示す斜視図である。図1は、モータ1の回転軸心を構成する回転軸線(以下、単に「軸線」と呼称する。)xに沿った方向(以下、「回転軸方向」と呼称する。)において、一方の側である上側から見たモータ1の外観の斜視図である。図2は、図1の2-2線に沿ったモータ1の断面図である。この断面図は、軸線xを含む仮想平面に沿ったモータ1の垂直断面図である。モータ1は、例えばドローン等の無人機の推進装置に組み込まれるモータである。
【0009】
以下の本実施形態の説明では、回転軸方向において、一方の側を上側と規定し、一方側の反対の他方の側を下側と規定する。この上側及び下側は、重力方向における上下関係とは必ずしも一致しない。また、軸線xに垂直な方向にモータ1の径方向が規定される。この径方向において、軸線xから遠ざかる側を外周側と規定する一方で、軸線xに近づく方向を内周側と規定する。さらに、軸線x周りにモータ1の周方向が規定される。この周方向において、モータ1を上側から見た場合に軸線x回りに時計回り及び反時計回りが規定される。
【0010】
図2に示すように、モータ1は、ステータ10と、ステータ10に回転自在に支持されたロータ30と、を備えている。ステータ10はホルダ11を有している。ホルダ11は、内周側の筒状の部分(以下、「内周部」と呼称する。)12と、内周部12よりも外周側に配置された筒状の部分(以下、「外周部」と呼称する。)13と、内周部12及び外周部13の下端同士を互いに接続する部分(以下、「接続部」と呼称する。)14と、を有している。ホルダ11は、例えば樹脂材料や金属材料から一体的に形成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
21日前
個人
発電機
17日前
ニデック株式会社
モータ
13日前
個人
発電システム
今日
西芝電機株式会社
回転電機
3日前
住友電装株式会社
電気接続箱
今日
トヨタ自動車株式会社
充電システム
2日前
住友電装株式会社
電気接続箱
今日
マツダ株式会社
電力変換装置
今日
富士電機株式会社
半導体装置
21日前
株式会社ミツバ
回転電機
今日
株式会社アイドゥス企画
負荷追従電動モータ
7日前
ダイハツ工業株式会社
モータ製造装置
6日前
株式会社ダイヘン
電圧調整装置
13日前
新光電子株式会社
発振器
2日前
トヨタ自動車株式会社
ステータ
今日
ミネベアミツミ株式会社
モータ
2日前
株式会社アイシン
回転電機用ステータ製造方法
8日前
株式会社デンソー
電気機器
2日前
トヨタ紡織株式会社
磁石挿入装置
13日前
ミネベアミツミ株式会社
発電装置
2日前
ミネベアミツミ株式会社
発電装置
2日前
株式会社アイドゥス企画
磁力トルクコンバータ
7日前
株式会社アイシン
回転電機用ステータ製造方法
8日前
株式会社ゲットクリーンエナジー
発電機
14日前
GX株式会社
可搬式太陽光発電用電源装置
21日前
日本精工株式会社
モータ
1日前
株式会社ダイヘン
無線給電システム
13日前
トヨタ自動車株式会社
充電制御装置
21日前
株式会社ゲットクリーンエナジー
モーター
今日
株式会社デンソー
電力変換装置
14日前
株式会社日立製作所
回転電機
2日前
株式会社アイシン
車載制御装置
2日前
マクセル株式会社
電池の放電装置
3日前
株式会社豊田自動織機
回転電機
13日前
株式会社豊田自動織機
回転電機
13日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ