TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074064
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2024188534
出願日
2024-10-25
発明の名称
ロボットハンド、ロボットハンドの制御方法およびロボットハンドの制御プログラム
出願人
国立大学法人 東京大学
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250502BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】制御の容易さと構造の簡素化を両立するロボットハンドを提供する。
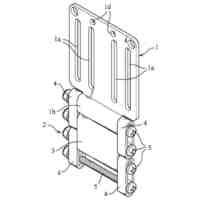
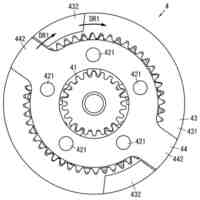
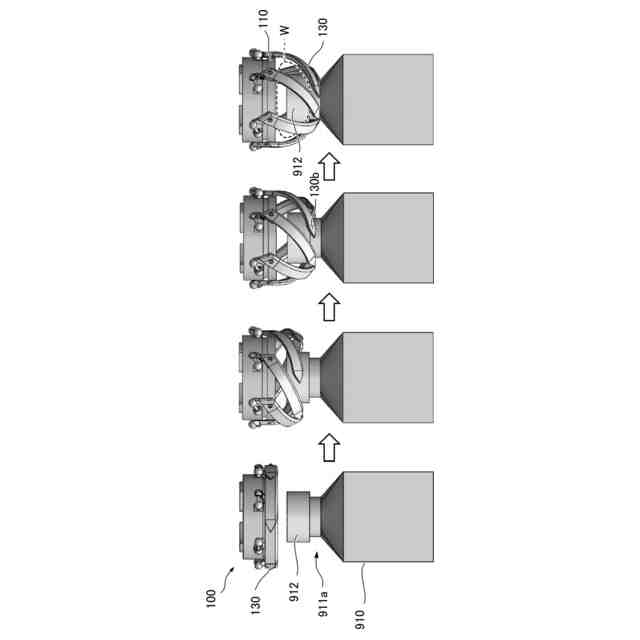
【解決手段】ロボットハンドは、アクチュエータによって中心軸周りに回動される円形部材と、円形部材を回動可能に支持する支持部材と、それぞれが基端部で円形部材の外周部に軸支され、基端部から先端部へ向かって延伸し、少なくとも先端部で円形部材の側へ湾曲または屈曲している3つ以上のフィンガー部材と、円形部材が支持部材に対して回動されると、それぞれのフィンガー部材を円形部材に対して横倒状態と縦立状態の間で変位させるリンク機構とを備える。
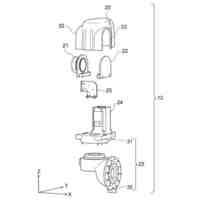
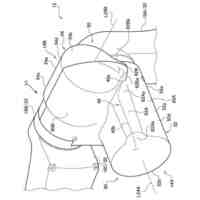
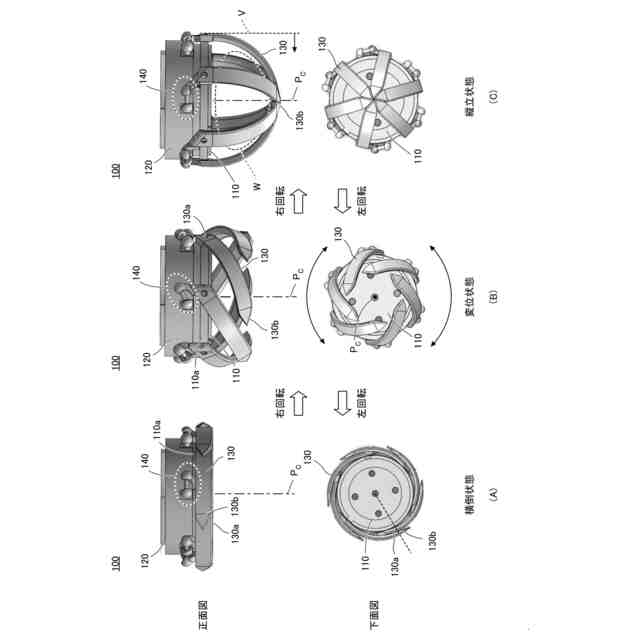
【選択図】図2
特許請求の範囲
【請求項1】
アクチュエータによって中心軸周りに回動される円形部材と、
前記円形部材を回動可能に支持する支持部材と、
それぞれが基端部で前記円形部材の外周部に軸支され、前記基端部から先端部へ向かって延伸し、少なくとも前記先端部で前記円形部材の側へ湾曲または屈曲している3つ以上のフィンガー部材と、
前記円形部材が前記支持部材に対して回動されると、それぞれの前記フィンガー部材を前記円形部材に対して横倒状態と縦立状態の間で変位させるリンク機構と
を備えるロボットハンド。
続きを表示(約 1,500 文字)
【請求項2】
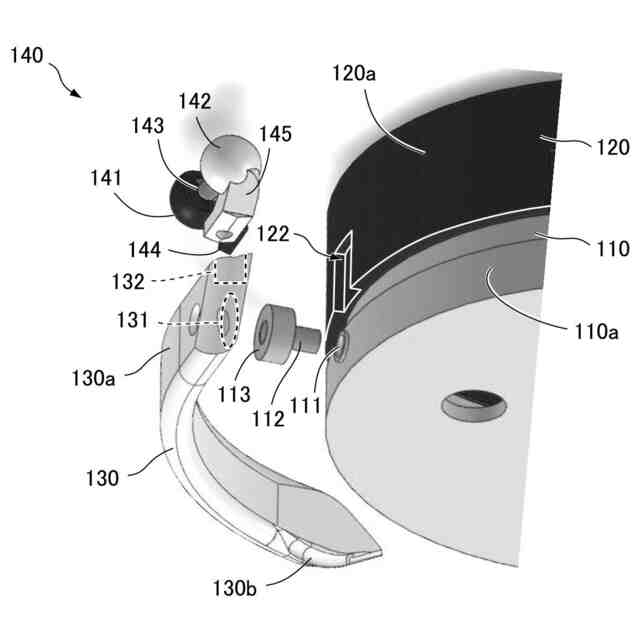
前記リンク機構は、前記支持部材の側に設けられた第1ボールジョイントと、前記フィンガー部材の側に設けられた第2ボールジョイントを含む請求項1に記載のロボットハンド。
【請求項3】
前記リンク機構は、前記支持部材の側に設けられたカム溝と、前記フィンガー部材の側に設けられたカムピンを含む請求項1に記載のロボットハンド。
【請求項4】
前記横倒状態において、それぞれの前記フィンガー部材の前記先端部は、一方に隣接する前記フィンガー部材の基端部と、前記円形部材の放射方向に重なり合う請求項1から3のいずれか1項に記載のロボットハンド。
【請求項5】
前記縦立状態において、それぞれの前記フィンガー部材の前記先端部は、前記円形部材の中心軸の延長線上に集合する請求項1から4のいずれか1項に記載のロボットハンド。
【請求項6】
前記縦立状態に変位した場合に、隣り合う前記フィンガー部材の間で懸架された状態となる網状部材を備える請求項1から5のいずれか1項に記載のロボットハンド。
【請求項7】
アクチュエータによって中心軸周りに回動される円形部材と、前記円形部材を回動可能に支持する支持部材と、前記円形部材が前記支持部材に対して回動されると前記円形部材に対して横倒状態から縦立状態へ変位する複数のフィンガー部材とを備えるロボットハンドの制御方法であって、
前記複数のフィンガー部材を前記横倒状態へ変位させる変位ステップと、
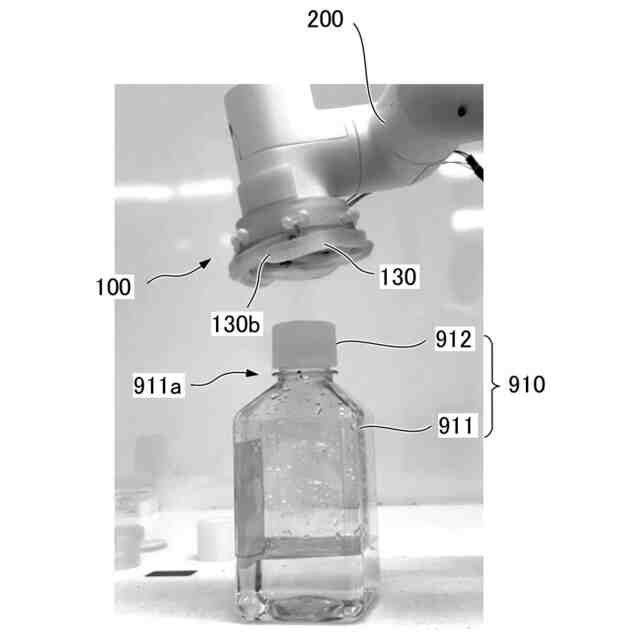
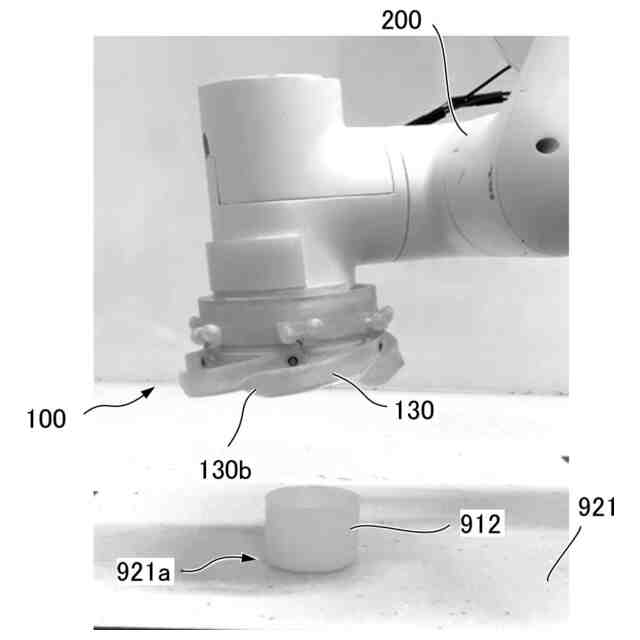
保持対象物の窪み箇所または前記保持対象物の接地箇所に基づいて、前記ロボットハンドを前記保持対象物へ接近させる接近ステップと、
前記複数のフィンガー部材を前記縦立状態へ変位させる過程において、前記複数のフィンガー部材のそれぞれの先端部を前記窪み箇所または前記接地箇所へ挿し込むことにより、前記保持対象物の少なくとも一部を、前記複数のフィンガー部材と前記円形部材に囲まれた保持空間に収容する収容ステップと、
前記保持対象物が移動される間は前記複数のフィンガー部材を変位させず前記保持空間を維持する維持ステップと
を有するロボットハンドの制御方法。
【請求項8】
前記窪み箇所は、前記保持対象物の第1部位と第2部位を接続する線材箇所を含み、前記保持空間は前記第1部位と前記第2部位のいずれかを収容する請求項7に記載の制御方法。
【請求項9】
アクチュエータによって中心軸周りに回動される円形部材と、前記円形部材を回動可能に支持する支持部材と、前記円形部材が前記支持部材に対して回動されると前記円形部材に対して横倒状態から縦立状態へ変位する複数のフィンガー部材とを備えるロボットハンドの制御プログラムであって、
前記複数のフィンガー部材を前記横倒状態へ変位させる変位ステップと、
保持対象物の窪み箇所または前記保持対象物の接地箇所に基づいて、前記ロボットハンドを前記保持対象物へ接近させる接近ステップと、
前記複数のフィンガー部材を前記縦立状態へ変位させる過程において、前記複数のフィンガー部材のそれぞれの先端部を前記窪み箇所または前記接地箇所へ挿し込むことにより、前記保持対象物の少なくとも一部を、前記複数のフィンガー部材と前記円形部材に囲まれた保持空間に収容する収容ステップと、
前記保持対象物が移動される間は前記複数のフィンガー部材を変位させず前記保持空間を維持する維持ステップと
をコンピュータに実行させるロボットハンドの制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンド、ロボットハンドの制御方法およびロボットハンドの制御プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ロボットアームの先端に装着される様々なロボットハンドが開発されている。ロボットハンドの具体例としては、できる限り人の手に似せたハンドや、関節を省略した平行グリッパ、流体で可動部を動作させるソフトグリッパなどが存在する(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2024-121657号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットハンドは、人の手に似せようとすると関節が多くなり制御が難しくなる。平行グリッパのように単純化すると、限定された条件を満たさない限り物体を把持できない。ソフトグリッパのように、流体を用いると構造上の制約が大きくなる。すなわち、これまで開発されてきたロボットハンドは、いずれも一長一短があり、制御の容易さと構造の簡素化を両立することが難しかった。
【0005】
本発明は、このような問題を解決するためになされたものであり、制御の容易さと構造の簡素化を両立するロボットハンド等を提供するものである。
【課題を解決するための手段】
【0006】
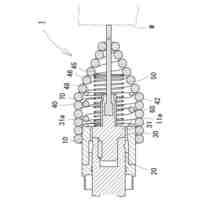
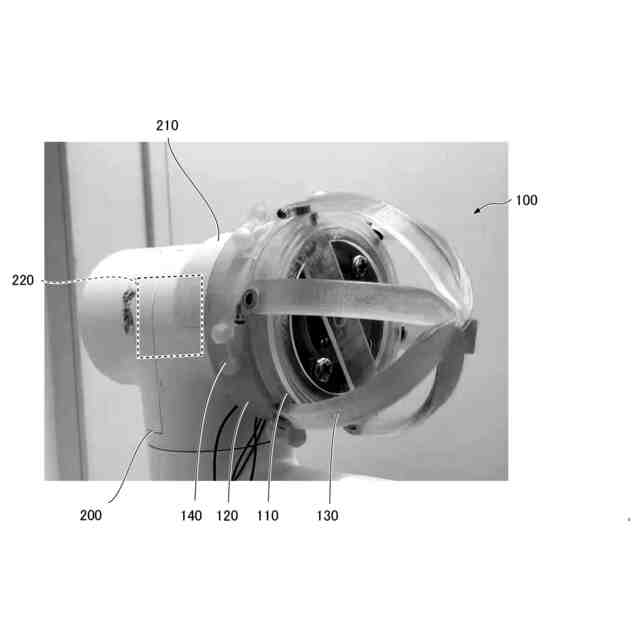
本発明の第1の態様におけるロボットハンドは、アクチュエータによって中心軸周りに回動される円形部材と、円形部材を回動可能に支持する支持部材と、それぞれが基端部で円形部材の外周部に軸支され、基端部から先端部へ向かって延伸し、少なくとも先端部で円形部材の側へ湾曲または屈曲している3つ以上のフィンガー部材と、円形部材が支持部材に対して回動されると、それぞれのフィンガー部材を円形部材に対して横倒状態と縦立状態の間で変位させるリンク機構とを備える。
【0007】
本発明の第2の態様におけるロボットハンドの制御方法は、アクチュエータによって中心軸周りに回動される円形部材と、円形部材を回動可能に支持する支持部材と、円形部材が支持部材に対して回動されると円形部材に対して横倒状態から縦立状態へ変位する複数のフィンガー部材とを備えるロボットハンドの制御方法であって、複数のフィンガー部材を横倒状態へ変位させる変位ステップと、保持対象物の窪み箇所または保持対象物の接地箇所に基づいて、ロボットハンドを保持対象物へ接近させる接近ステップと、複数のフィンガー部材を縦立状態へ変位させる過程において、複数のフィンガー部材のそれぞれの先端部を窪み箇所または接地箇所へ挿し込むことにより、保持対象物の少なくとも一部を、複数のフィンガー部材と円形部材に囲まれた保持空間に収容する収容ステップと、保持対象物が移動される間は複数のフィンガー部材を変位させず保持空間を維持する維持ステップとを有する。
【0008】
本発明の第3の態様におけるロボットハンドの制御プログラムは、アクチュエータによって中心軸周りに回動される円形部材と、円形部材を回動可能に支持する支持部材と、円形部材が支持部材に対して回動されると円形部材に対して横倒状態から縦立状態へ変位する複数のフィンガー部材とを備えるロボットハンドの制御プログラムであって、複数のフィンガー部材を横倒状態へ変位させる変位ステップと、保持対象物の窪み箇所または保持対象物の接地箇所に基づいて、ロボットハンドを保持対象物へ接近させる接近ステップと、
【0009】
複数のフィンガー部材を縦立状態へ変位させる過程において、複数のフィンガー部材のそれぞれの先端部を窪み箇所または接地箇所へ挿し込むことにより、保持対象物の少なくとも一部を、複数のフィンガー部材と円形部材に囲まれた保持空間に収容する収容ステップと、保持対象物が移動される間は複数のフィンガー部材を変位させず保持空間を維持する維持ステップとをコンピュータに実行させる。
【発明の効果】
【0010】
本発明により、制御の容易さと構造の簡素化を両立するロボットハンド等を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人 東京大学
化学センサ用基材
今日
日本特殊陶業株式会社
超音波発生装置
1日前
国立大学法人 東京大学
多孔質構造を有するハイドロゲルの製造方法
今日
OMC株式会社
ロボット
29日前
株式会社クレスコ
補助吸着具
22日前
株式会社不二越
ロボット
14日前
株式会社エビス
腰ベルト用連結具
29日前
工機ホールディングス株式会社
作業機
1か月前
庄内機械株式会社
釘打装置
1日前
株式会社イノウ
給油口キャップ用開閉具
15日前
川崎重工業株式会社
制動システム
14日前
株式会社アイエイアイ
グリッパー
3日前
住友重機械工業株式会社
ロボット
8日前
株式会社不二越
垂直多関節ロボット
15日前
トヨタ自動車東日本株式会社
搬送治具
1日前
芝浦機械株式会社
双腕ロボット
7日前
アイホン株式会社
ネジ締めカウントシステム
16日前
トヨタ自動車株式会社
荷姿影響緩和方法
4日前
パナソニック株式会社
工具
15日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
15日前
株式会社マキタ
電動工具
1日前
住友重機械工業株式会社
ロボット及びカバー
8日前
アピュアン株式会社
エアー式衝撃工具
1か月前
株式会社ダイヘン
端末装置
1日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
8日前
住友重機械工業株式会社
アクチュエータ支持部材
7日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
1日前
株式会社マキタ
打ち込み工具
16日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
中国電力株式会社
電動ドライバー
1か月前
SB C&S株式会社
治具セット
29日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ